基于SVPWM的感應電機控制仿真設計
2012年07月24日 16:48 來源:微計算機信息 作者:秩名 我要評論(0)
1 引言
隨著電力電子技術和微電子技術的發展,脈寬調制技術(PWM)和正弦脈寬調制技術(SPWM)在電機控制系統中已經得到越來越多的應用。使用SPWM 來控制電機系統,電路結構簡單,成本較低,但系統性能不高,電壓利用率不高,諧波成分較大。近年來電機的空間矢量理論被引入電機控制系統中,形成了空間矢量脈寬調制技術(SVPWM),其原理是就是利用逆變器各橋臂開關控制信號的不同組合,使逆變器的輸出空間電壓矢量的運行軌跡盡可能接近圓形。SVPWM 與常規的SPWM 相比,能明顯減小逆變器輸出電壓的諧波成分,降低脈動轉矩,而且有較高的電壓利用率,更易于數字實現,因而在交流感應電機控制中,應用前景十分看好。
2 SVPWM 脈寬調制原理
2.1 八個電壓空間矢量與扇區劃分
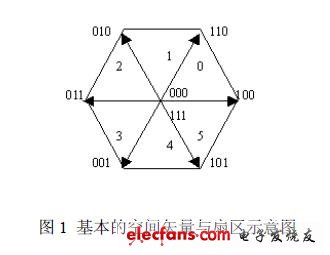
空間矢量脈寬調制SVPWM 實際上對應于交流感應電機中的三相電壓源逆變器的功率器件的一種特殊的開關觸發順序和脈寬大小的組合。在采用三相逆變器對異步電機供電時,根據逆變器的工作原理可以知道,逆變橋共有23 =8 種狀態,若將逆變器的八種狀態用電壓空間矢量來表示,則形成8 個基本的電壓空間矢量,其中6 個非零矢量,2 個零矢量,每兩個電壓矢量在空間相隔60o,如圖1 所示[2] 。SVPWM 技術的目的是通過與基本的空間矢量對應的開關狀態的組合得到一個給定的定子參考電壓矢量。
2.2 SVPWM 的實現
SVPWM 信號的實時調制需要定子參考電壓矢量的二維靜止坐標系α軸和β軸的分量uα。 s 、uβ。 s 以及PWM 周期Tpwm 作為輸入,其產生框圖如圖2 所示。

圖2 SVPWM 產生框圖
2.2.1 相鄰兩矢量作用時間的確定
定義如下X、Y、Z 三個變量:![]() 。
。
參考電壓矢量位于被基本空間矢量所包含的扇區中時,矢量作用時間的相對值T1 和T2 可以用X,Y 或Z 表示,它們的對應關系如表1 所示。表1T1、T2 與X、Y、Z 的對應關系表
表1 T1、T2 與X、Y、Z 的對應關系表
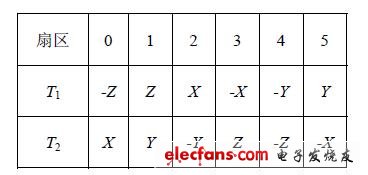
對不同扇區的T1、T2,按表1 所示取值,還要對其進行飽和判斷:如果T1+T2>Tpwm, 則T1= T1*Tpwm/(T1+ T2),T2= T2*Tpwm/(T1+ T2)。
2.2.2 判斷定子參考電壓矢量所在扇區
定義三個參考量Vref1 、Vref2 、Vref3 ,令Vref 1 =X;Vref 2 =.Z;Vref 3 =.Y 。
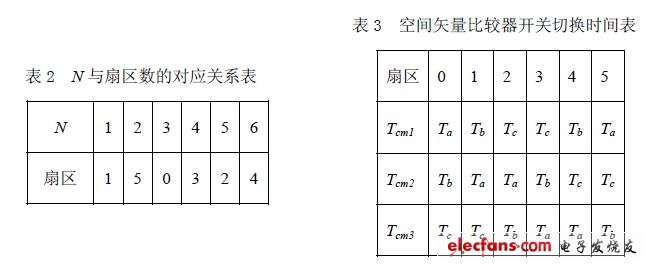
如果Vref1>0,則A=1,否則A=0;如果Vref2>0,則B=1,否則B =0;如果Vref3>0,則C=1,否則C =0。設N =A +2B +4C ,則N 與扇區數的對應關系如表2 所示。
2.2.3 確定比較器的切換點
定義:
經過上式計算就可得到SVPWM 的參考調制信號,最后根據扇區確定電壓空間矢量切換點Tcm1、Tcm2、Tcm3,如表3 所示。
本文導航
- 第 1 頁:基于SVPWM的感應電機控制仿真設計
- 第 2 頁:電流注入型感應電機矢量控制方案