循環(huán)神經(jīng)網(wǎng)絡(luò) (RNN) 是一種深度學(xué)習(xí)結(jié)構(gòu),它使用過(guò)去的信息來(lái)提高網(wǎng)絡(luò)處理當(dāng)前和將來(lái)輸入的性能。RNN 的獨(dú)特之處在于該網(wǎng)絡(luò)包含隱藏狀態(tài)和循環(huán)。
2024-02-29 14:56:10 291
291 
個(gè) Arm 處理器,它們組成了一個(gè)尖峰神經(jīng)網(wǎng)絡(luò)。第二,一個(gè)位于海德保的物理模型機(jī),模擬電子模型,由400萬(wàn)個(gè)神經(jīng)元和20個(gè)硅晶片上的10億個(gè)突觸組成。作為短期利益,HBP 希望其神經(jīng)形態(tài)學(xué)平臺(tái)能夠提高
2022-04-16 15:01:00
神經(jīng)網(wǎng)絡(luò)50例
2012-11-28 16:49:56
神經(jīng)網(wǎng)絡(luò)Matlab程序
2009-09-15 12:52:24
大家有知道labview中神經(jīng)網(wǎng)絡(luò)和SVM的工具包是哪個(gè)嗎?求分享一下,有做這方面的朋友也可以交流一下,大家共同進(jìn)步
2017-10-13 11:41:43
神經(jīng)網(wǎng)絡(luò)基本介紹
2018-01-04 13:41:23
源程序 4.3 旅行商問(wèn)題(TSP)的HNN求解 Hopfield模型求解TSP源程序 第5章 隨機(jī)型神經(jīng)網(wǎng)絡(luò) 5.1 模擬退火算法 5.2 Boltzmann機(jī) Boltzmann機(jī)模型
2012-03-20 11:32:43
將神經(jīng)網(wǎng)絡(luò)移植到STM32最近在做的一個(gè)項(xiàng)目需要用到網(wǎng)絡(luò)進(jìn)行擬合,并且將擬合得到的結(jié)果用作控制,就在想能不能直接在單片機(jī)上做神經(jīng)網(wǎng)絡(luò)計(jì)算,這樣就可以實(shí)時(shí)計(jì)算,不依賴于上位機(jī)。所以要解決的主要是兩個(gè)
2022-01-11 06:20:53
神經(jīng)網(wǎng)絡(luò)簡(jiǎn)介
2012-08-05 21:01:08
基于深度學(xué)習(xí)的神經(jīng)網(wǎng)絡(luò)算法
2019-05-16 17:25:05
CV之YOLOv3:深度學(xué)習(xí)之計(jì)算機(jī)視覺(jué)神經(jīng)網(wǎng)絡(luò)Yolov3-5clessses訓(xùn)練自己的數(shù)據(jù)集全程記錄(第二次)——Jason niu
2018-12-24 11:52:25
神經(jīng)網(wǎng)絡(luò)的發(fā)展可以追溯到二戰(zhàn)時(shí)期,那時(shí)候先輩們正想著如何用人類的方式去存儲(chǔ)和處理信息,于是他們開(kāi)始構(gòu)建計(jì)算系統(tǒng)。由于當(dāng)時(shí)計(jì)算機(jī)機(jī)器和技術(shù)的發(fā)展限制,這一技術(shù)并沒(méi)有得到廣泛的關(guān)注和應(yīng)用。幾十年來(lái)
2018-06-05 10:11:50
MATLAB神經(jīng)網(wǎng)絡(luò)
2013-07-08 15:17:13
多體動(dòng)力學(xué)軟件---RecurDyn的基礎(chǔ)知識(shí),供大家分享和學(xué)習(xí) ;) RecurDyn介紹:(摘自多體動(dòng)力學(xué)仿真軟件
2009-03-24 15:12:31
請(qǐng)問(wèn):我在用labview做BP神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)故障診斷,在NI官網(wǎng)找到了機(jī)器學(xué)習(xí)工具包(MLT),但是里面沒(méi)有關(guān)于這部分VI的幫助文檔,對(duì)于”BP神經(jīng)網(wǎng)絡(luò)分類“這個(gè)范例有很多不懂的地方,比如
2017-02-22 16:08:08
習(xí)神經(jīng)神經(jīng)網(wǎng)絡(luò),對(duì)于神經(jīng)網(wǎng)絡(luò)的實(shí)現(xiàn)是如何一直沒(méi)有具體實(shí)現(xiàn)一下:現(xiàn)看到一個(gè)簡(jiǎn)單的神經(jīng)網(wǎng)絡(luò)模型用于訓(xùn)練的輸入數(shù)據(jù):對(duì)應(yīng)的輸出數(shù)據(jù):我們這里設(shè)置:1:節(jié)點(diǎn)個(gè)數(shù)設(shè)置:輸入層、隱層、輸出層的節(jié)點(diǎn)
2021-08-18 07:25:21
學(xué)習(xí)和認(rèn)知科學(xué)領(lǐng)域,是一種模仿生物神經(jīng)網(wǎng)絡(luò)(動(dòng)物的中樞神經(jīng)系統(tǒng),特別是大腦)的結(jié)構(gòu)和功能的數(shù)學(xué)模型或計(jì)算模型,用于對(duì)函數(shù)進(jìn)行估計(jì)或近似。神經(jīng)網(wǎng)絡(luò)由大量的人工神經(jīng)元聯(lián)結(jié)進(jìn)行計(jì)算。大多數(shù)情況下人工神經(jīng)網(wǎng)絡(luò)
2019-03-03 22:10:19
【智能控制】機(jī)械手參數(shù)辨識(shí)——雙關(guān)節(jié)機(jī)械臂動(dòng)力學(xué)方程.zip
2018-01-11 22:23:21
今天學(xué)習(xí)了兩個(gè)神經(jīng)網(wǎng)絡(luò),分別是自適應(yīng)諧振(ART)神經(jīng)網(wǎng)絡(luò)與自組織映射(SOM)神經(jīng)網(wǎng)絡(luò)。整體感覺(jué)不是很難,只不過(guò)一些最基礎(chǔ)的概念容易理解不清。首先ART神經(jīng)網(wǎng)絡(luò)是競(jìng)爭(zhēng)學(xué)習(xí)的一個(gè)代表,競(jìng)爭(zhēng)型學(xué)習(xí)
2019-07-21 04:30:00
傳播的,不會(huì)回流),區(qū)別于循環(huán)神經(jīng)網(wǎng)絡(luò)RNN。BP算法(Back Propagation):誤差反向傳播算法,用于更新網(wǎng)絡(luò)中的權(quán)重。BP神經(jīng)網(wǎng)絡(luò)思想:表面上:1. 數(shù)據(jù)信息的前向傳播,從輸入層到隱含層
2019-07-21 04:00:00
這個(gè)網(wǎng)絡(luò)輸入和相應(yīng)的輸出來(lái)“訓(xùn)練”這個(gè)網(wǎng)絡(luò),網(wǎng)絡(luò)根據(jù)輸入和輸出不斷地調(diào)節(jié)自己的各節(jié)點(diǎn)之間的權(quán)值來(lái)滿足輸入和輸出。這樣,當(dāng)訓(xùn)練結(jié)束后,我們給定一個(gè)輸入,網(wǎng)絡(luò)便會(huì)根據(jù)自己已調(diào)節(jié)好的權(quán)值計(jì)算出一個(gè)輸出。這就是神經(jīng)網(wǎng)絡(luò)的簡(jiǎn)單原理。 神經(jīng)網(wǎng)絡(luò)原理下載-免費(fèi)
2008-06-19 14:40:42
人工神經(jīng)網(wǎng)絡(luò)(Artificial Neural Network,ANN)是一種類似生物神經(jīng)網(wǎng)絡(luò)的信息處理結(jié)構(gòu),它的提出是為了解決一些非線性,非平穩(wěn),復(fù)雜的實(shí)際問(wèn)題。那有哪些辦法能實(shí)現(xiàn)人工神經(jīng)網(wǎng)絡(luò)呢?
2019-08-01 08:06:21
人工神經(jīng)網(wǎng)絡(luò)課件
2016-06-19 10:15:48
簡(jiǎn)單理解LSTM神經(jīng)網(wǎng)絡(luò)
2021-01-28 07:16:57
圖卷積神經(jīng)網(wǎng)絡(luò)
2019-08-20 12:05:29
優(yōu)化神經(jīng)網(wǎng)絡(luò)訓(xùn)練方法有哪些?
2022-09-06 09:52:36
全連接神經(jīng)網(wǎng)絡(luò)和卷積神經(jīng)網(wǎng)絡(luò)的區(qū)別
2019-06-06 14:21:42
分布式驅(qū)動(dòng)電動(dòng)汽車動(dòng)力學(xué)控制問(wèn)題車輛動(dòng)力學(xué)控制的控制目標(biāo)是改善車輛的安全性、轉(zhuǎn)向特性、操控性、乘坐舒適性,并且減輕駕駛員的工作負(fù)擔(dān),尤其是在緊急行駛工況下,可以控制車輛的動(dòng)力學(xué)性能,包括縱向、側(cè)向
2021-08-30 07:23:04
以前的神經(jīng)網(wǎng)絡(luò)幾乎都是部署在云端(服務(wù)器上),設(shè)備端采集到數(shù)據(jù)通過(guò)網(wǎng)絡(luò)發(fā)送給服務(wù)器做inference(推理),結(jié)果再通過(guò)網(wǎng)絡(luò)返回給設(shè)備端。如今越來(lái)越多的神經(jīng)網(wǎng)絡(luò)部署在嵌入式設(shè)備端上,即
2021-12-23 06:16:40
卷積神經(jīng)網(wǎng)絡(luò)為什么適合圖像處理?
2022-09-08 10:23:10
卷積神經(jīng)網(wǎng)絡(luò)(CNN)究竟是什么,鑒于神經(jīng)網(wǎng)絡(luò)在工程上經(jīng)歷了曲折的歷史,您為什么還會(huì)在意它呢? 對(duì)于這些非常中肯的問(wèn)題,我們似乎可以給出相對(duì)簡(jiǎn)明的答案。
2019-07-17 07:21:50
。神經(jīng)網(wǎng)絡(luò)的思想起源于1943年McCulloch 和 Pitts 提出的神經(jīng)元模型[19],簡(jiǎn)稱 MCP 神經(jīng)元模 型。它是利用計(jì)算機(jī)來(lái)模擬人的神經(jīng)元反應(yīng)的過(guò) 程,具有開(kāi)創(chuàng)性意義。此模型將神經(jīng)元反應(yīng)簡(jiǎn)化
2022-08-02 10:39:39
卷積神經(jīng)網(wǎng)絡(luò)的層級(jí)結(jié)構(gòu) 卷積神經(jīng)網(wǎng)絡(luò)的常用框架
2020-12-29 06:16:44
什么是卷積神經(jīng)網(wǎng)絡(luò)?ImageNet-2010網(wǎng)絡(luò)結(jié)構(gòu)是如何構(gòu)成的?有哪些基本參數(shù)?
2021-06-17 11:48:22
我們可以對(duì)神經(jīng)網(wǎng)絡(luò)架構(gòu)進(jìn)行優(yōu)化,使之適配微控制器的內(nèi)存和計(jì)算限制范圍,并且不會(huì)影響精度。我們將在本文中解釋和探討深度可分離卷積神經(jīng)網(wǎng)絡(luò)在 Cortex-M 處理器上實(shí)現(xiàn)關(guān)鍵詞識(shí)別的潛力。關(guān)鍵詞識(shí)別
2021-07-26 09:46:37
四旋翼飛行器的動(dòng)力學(xué)建模及PID控制
2017-04-02 14:00:51
四旋翼飛行器的動(dòng)力學(xué)建模及PID控制
2015-06-20 17:05:05
最近在學(xué)習(xí)電機(jī)的智能控制,上周學(xué)習(xí)了基于單神經(jīng)元的PID控制,這周研究基于BP神經(jīng)網(wǎng)絡(luò)的PID控制。神經(jīng)網(wǎng)絡(luò)具有任意非線性表達(dá)能力,可以通過(guò)對(duì)系統(tǒng)性能的學(xué)習(xí)來(lái)實(shí)現(xiàn)具有最佳組合的PID控制。利用BP
2021-09-07 07:43:47
基于BP神經(jīng)網(wǎng)絡(luò)的辨識(shí)
2018-01-04 13:37:27
FPGA實(shí)現(xiàn)神經(jīng)網(wǎng)絡(luò)關(guān)鍵問(wèn)題分析基于FPGA的ANN實(shí)現(xiàn)方法基于FPGA的神經(jīng)網(wǎng)絡(luò)的性能評(píng)估及局限性
2021-04-30 06:58:13
基于RBF神經(jīng)網(wǎng)絡(luò)的辨識(shí)
2018-01-04 13:38:52
基于多體系統(tǒng)動(dòng)力學(xué)的空氣懸架大客車平順性試驗(yàn)仿真研究本文以空氣懸架大客車為研究對(duì)象,采用多體系統(tǒng)動(dòng)力學(xué)的理論方法,應(yīng)用ADAMS 軟件建立了DD6115H 型空氣懸架大客車八十五自由度整車動(dòng)力學(xué)模型
2009-12-02 12:38:55
如何用stm32cube.ai簡(jiǎn)化人工神經(jīng)網(wǎng)絡(luò)映射?如何使用stm32cube.ai部署神經(jīng)網(wǎng)絡(luò)?
2021-10-11 08:05:42
原文鏈接:http://tecdat.cn/?p=5725 神經(jīng)網(wǎng)絡(luò)是一種基于現(xiàn)有數(shù)據(jù)創(chuàng)建預(yù)測(cè)的計(jì)算系統(tǒng)。如何構(gòu)建神經(jīng)網(wǎng)絡(luò)?神經(jīng)網(wǎng)絡(luò)包括:輸入層:根據(jù)現(xiàn)有數(shù)據(jù)獲取輸入的層隱藏層:使用反向傳播優(yōu)化輸入變量權(quán)重的層,以提高模型的預(yù)測(cè)能力輸出層:基于輸入和隱藏層的數(shù)據(jù)輸出預(yù)測(cè)
2021-07-12 08:02:11
神經(jīng)網(wǎng)絡(luò)(Neural Networks)是人工神經(jīng)網(wǎng)絡(luò)(Ar-tificial Neural Networks)的簡(jiǎn)稱,是當(dāng)前的研究熱點(diǎn)之一。人腦在接受視覺(jué)感官傳來(lái)的大量圖像信息后,能迅速做出反應(yīng)
2019-08-08 06:11:30
作者:李云紅0 引言自20世紀(jì)70年代以來(lái),模擬電路故障診斷領(lǐng)域已經(jīng)取得了一定的研究成果,近年來(lái),基于神經(jīng)網(wǎng)絡(luò)技術(shù)的現(xiàn)代模擬電路軟故障診斷方法已成為新的研究熱點(diǎn),神經(jīng)網(wǎng)絡(luò)的泛化能力和非線性映射能力
2019-07-05 08:06:02
小型四軸飛行器動(dòng)力學(xué)參數(shù)是多少?
2013-10-15 18:56:20
應(yīng)用人工神經(jīng)網(wǎng)絡(luò)模擬污水生物處理(1.浙江工業(yè)大學(xué)建筑工程學(xué)院, 杭州 310014; 2.鎮(zhèn)江水工業(yè)公司排水管理處,鎮(zhèn)江 212003)摘要:針對(duì)復(fù)雜的非線性污水生物處理過(guò)程,開(kāi)發(fā)了徑向基函數(shù)的人
2009-08-08 09:56:00
譯者|VincentLee來(lái)源 |曉飛的算法工程筆記脈沖神經(jīng)網(wǎng)絡(luò)(Spiking neural network, SNN)將脈沖神經(jīng)元作為計(jì)算單...
2021-07-26 06:23:59
有提供編寫(xiě)神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)程序服務(wù)的嗎?
2011-12-10 13:50:46
氣體動(dòng)力學(xué)在流量測(cè)量電子技術(shù)中的應(yīng)用
2021-04-01 06:45:46
求助地震波神經(jīng)網(wǎng)絡(luò)程序,共同交流!!
2013-05-11 08:14:19
小女子做基于labview的蒸發(fā)過(guò)程中液位的控制,想使用神經(jīng)網(wǎng)絡(luò)pid控制,請(qǐng)問(wèn)這個(gè)控制方法可以嗎?有誰(shuí)會(huì)神經(jīng)網(wǎng)絡(luò)pid控制么。。。叩謝
2016-09-23 13:43:16
求助大神 小的現(xiàn)在有個(gè)難題: 一組車重實(shí)時(shí)數(shù)據(jù) 對(duì)應(yīng)一個(gè)車重的最終數(shù)值(一個(gè)一維數(shù)組輸入對(duì)應(yīng)輸出一個(gè)數(shù)值) 這其中可能經(jīng)過(guò)均值、方差、去掉N個(gè)最大值、、、等等的計(jì)算 我的目的就是弄清楚這個(gè)中間計(jì)算過(guò)程 最近實(shí)在想不出什么好辦法就打算試試神經(jīng)網(wǎng)絡(luò) 請(qǐng)教大神用什么神經(jīng)網(wǎng)絡(luò)好求神經(jīng)網(wǎng)絡(luò)程序
2016-07-14 13:35:44
汽車系統(tǒng)動(dòng)力學(xué) 喜歡的小伙伴可以下載
2017-11-01 10:40:51
電力拖動(dòng)系統(tǒng)的動(dòng)力學(xué)課件電力拖動(dòng)系統(tǒng)的動(dòng)力學(xué)Dynamics of Electric Drive Systems1.了解電力拖動(dòng)基本概念;2.熟悉電力拖動(dòng)系統(tǒng)運(yùn)動(dòng)方程式;3.掌握拖動(dòng)轉(zhuǎn)矩和負(fù)載轉(zhuǎn)矩
2008-11-19 22:14:17
最簡(jiǎn)單的神經(jīng)網(wǎng)絡(luò)
2019-09-11 11:57:36
請(qǐng)問(wèn)各位在labview MathScript節(jié)點(diǎn)中 以下這個(gè)機(jī)器人的動(dòng)力學(xué)公式應(yīng)該怎么編寫(xiě)呢?謝謝大家了!!
2017-11-16 19:22:42
視覺(jué)任務(wù)中,并取得了巨大成功。然而,由于存儲(chǔ)空間和功耗的限制,神經(jīng)網(wǎng)絡(luò)模型在嵌入式設(shè)備上的存儲(chǔ)與計(jì)算仍然是一個(gè)巨大的挑戰(zhàn)。前面幾篇介紹了如何在嵌入式AI芯片上部署神經(jīng)網(wǎng)絡(luò):【嵌入式AI開(kāi)發(fā)】篇五|實(shí)戰(zhàn)篇一:STM32cubeIDE上部署神經(jīng)網(wǎng)絡(luò)之pytorch搭建指紋識(shí)別模型.onnx...
2021-12-14 07:35:25
`將非局部計(jì)算作為獲取長(zhǎng)時(shí)記憶的通用模塊,提高神經(jīng)網(wǎng)絡(luò)性能在深度神經(jīng)網(wǎng)絡(luò)中,獲取長(zhǎng)時(shí)記憶(long-range dependency)至關(guān)重要。對(duì)于序列數(shù)據(jù)(例如語(yǔ)音、語(yǔ)言),遞歸運(yùn)算
2018-11-12 14:52:50
飛行器動(dòng)力學(xué)參數(shù)在線辨識(shí)EKF算法實(shí)驗(yàn)流程飛行器俯仰通道動(dòng)力學(xué)方程線性化飛行器俯仰通道動(dòng)力學(xué)方程離散化線性卡爾曼濾波過(guò)程實(shí)驗(yàn)流程??飛行器俯仰通道動(dòng)力學(xué)微分方程是連續(xù)非線性方程,要進(jìn)行擴(kuò)展卡爾曼濾波
2021-08-27 06:06:16
根據(jù)高梯度磁分離原理,分析了磁性微粒在高梯度磁場(chǎng)中的運(yùn)動(dòng)規(guī)律,提出了磁性微粒在高梯度磁場(chǎng)中所受磁場(chǎng)力、流體曳力的計(jì)算方法,并建立了顆粒運(yùn)動(dòng)的動(dòng)力學(xué)方程。用FLUENT軟件對(duì)微粒的運(yùn)動(dòng)軌跡進(jìn)行數(shù)值計(jì)算
2010-05-13 09:11:32
量子力學(xué)作業(yè)習(xí)題集:一、 章節(jié)習(xí)題 第一章 緒論 第二章 波函數(shù)與波動(dòng)力學(xué) 第三章 一維定態(tài)問(wèn)題 第四章 量子力學(xué)中的力學(xué)量 第五章 變量
2008-11-25 13:22:54 0
0 本文以Nidoc - 970 尿動(dòng)力學(xué)分析儀為例, 介紹了尿動(dòng)力學(xué)分析儀的功能、特點(diǎn)、工作原理, 結(jié)合臨床應(yīng)用經(jīng)驗(yàn)將尿動(dòng)力學(xué)分析儀儀器的清洗、消毒、儀器校準(zhǔn)及操作方法和注意事項(xiàng)作
2009-06-23 08:41:5310 熱分析動(dòng)力學(xué):本分析以熱分析動(dòng)力學(xué)議程為主線,本書(shū)內(nèi)容共分為三部分:第一部分包括熱分析動(dòng)力學(xué)理論,方法和技術(shù)的回顧。兩類動(dòng)力學(xué)議程和三類溫度積分式的數(shù)學(xué)的推導(dǎo)。
2009-12-01 14:46:300 具有高度復(fù)雜非線性動(dòng)力學(xué)特性的混沌神經(jīng)網(wǎng)絡(luò)系統(tǒng)已成為近年來(lái)進(jìn)行加密通信應(yīng)用研究的熱點(diǎn)課題。本文首先概括了混沌神經(jīng)網(wǎng)絡(luò)的一些主要理論模型及其非線性動(dòng)力學(xué)系統(tǒng)的特點(diǎn)和
2011-03-22 00:11:3624 在核動(dòng)力蒸汽發(fā)生器(SG)運(yùn)行過(guò)程中,其逆動(dòng)力學(xué)效應(yīng)使其動(dòng)態(tài)特性難以辨識(shí)。為提高蒸汽發(fā)生器動(dòng)態(tài)特性辨識(shí)的效果,提出了基于小波神經(jīng)網(wǎng)絡(luò)的蒸汽發(fā)生器動(dòng)態(tài)過(guò)程辨識(shí)的新方法。辨
2011-09-28 14:01:4412 關(guān)于飛盤的空氣動(dòng)力學(xué)
2016-12-25 00:47:209 耗散粒子動(dòng)力學(xué)(DPD)模擬是一種重要的研究流體動(dòng)力學(xué)特性的計(jì)算模擬方法,基于Intel MIC平臺(tái)設(shè)計(jì)實(shí)現(xiàn)了面向大規(guī)模耗散粒子動(dòng)力學(xué)模擬,充分結(jié)合了DPD模擬本身的特性和MIC平臺(tái)的特征。對(duì)DPD
2017-11-17 16:25:4610 神經(jīng)網(wǎng)絡(luò)是一種模擬人腦結(jié)構(gòu)的算法模型。其原理就在于將信息分布式存儲(chǔ)和并行協(xié)同處理。雖然每個(gè)單元的功能非常簡(jiǎn)單,但大量單元構(gòu)成的網(wǎng)絡(luò)系統(tǒng)就能實(shí)現(xiàn)非常復(fù)雜的數(shù)據(jù)計(jì)算,并且還是一個(gè)高度復(fù)雜的非線性動(dòng)力學(xué)習(xí)系統(tǒng)。
2017-12-05 15:06:4351397 
神經(jīng)網(wǎng)絡(luò)基本介紹,人工神經(jīng)網(wǎng)絡(luò)(簡(jiǎn)稱神經(jīng)網(wǎng)絡(luò),Neural Network)是模擬人腦思維方式的數(shù)學(xué)模型。
神經(jīng)網(wǎng)絡(luò)是在現(xiàn)代生物學(xué)研究人腦組織成果的基礎(chǔ)上提出的,用來(lái)模擬人類大腦神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)和行為。神經(jīng)網(wǎng)絡(luò)反映了人腦功能的基本特征,如并行信息處理、學(xué)習(xí)、聯(lián)想、模式分類、記憶等。
2017-12-06 15:07:500 ,對(duì)該工況下空間機(jī)械臂運(yùn)動(dòng)特性進(jìn)行了分析,建立了系統(tǒng)在受到外部擾動(dòng)時(shí)的動(dòng)力學(xué)模型,并對(duì)動(dòng)力學(xué)特性進(jìn)行了歸納,提出了一種基于模糊遞歸神經(jīng)網(wǎng)絡(luò)的控制策略。根據(jù)李雅普諾夫第二類方法,證明了整個(gè)閉環(huán)控制系統(tǒng)的運(yùn)動(dòng)漸進(jìn)穩(wěn)定
2018-03-10 11:34:592 人工神經(jīng)網(wǎng)絡(luò)是一種基于連接概念的智能模擬方法。它具有分布式存儲(chǔ)信息、容錯(cuò)性和大規(guī)模并行處理結(jié)構(gòu)的特點(diǎn),并具有自適應(yīng)、自學(xué)習(xí)、自組織的能力。在理論上能夠?qū)W習(xí)并以任意精度逼近任何非線性和不確定系統(tǒng)的動(dòng)力學(xué)模型。人工神經(jīng)網(wǎng)絡(luò)為解決混沌非動(dòng)力系統(tǒng)加密方法提供了新的方法和思路。
2018-12-30 08:35:003140 
深度學(xué)習(xí)領(lǐng)域中,處理一張大圖的時(shí)候,使用卷積神經(jīng)網(wǎng)絡(luò)的計(jì)算量隨著圖片像素的增加而線性增加。如果參考人的視覺(jué),有選擇地分配注意力,就能選擇性地從圖片或視頻中提取一系列的區(qū)域,每次只對(duì)提取的區(qū)域進(jìn)行處理
2018-10-22 08:58:001494 針對(duì)電力信息網(wǎng)絡(luò)中的高級(jí)持續(xù)性威脅問(wèn)題,提出一種基于混合卷積神經(jīng)網(wǎng)絡(luò)( CNN)和循環(huán)神經(jīng)網(wǎng)絡(luò)( RNN)的入侵檢測(cè)模型。該模型根據(jù)網(wǎng)絡(luò)數(shù)據(jù)流量的統(tǒng)計(jì)特征對(duì)當(dāng)前網(wǎng)絡(luò)狀態(tài)進(jìn)行分類。首先,獲取日志文件
2018-12-12 17:27:2019 關(guān)于時(shí)間展開(kāi)的循環(huán)神經(jīng)網(wǎng)絡(luò),在序列結(jié)束時(shí)具有單個(gè)輸出。
2019-07-05 14:44:50927 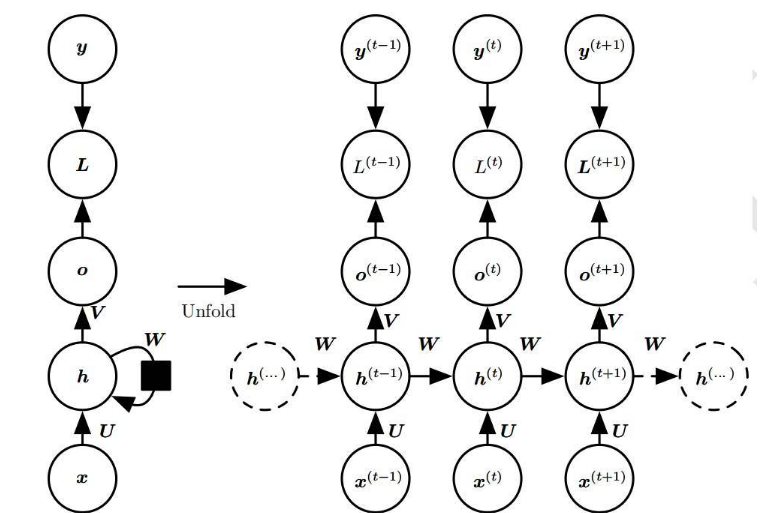
電磁學(xué)或稱電動(dòng)力學(xué)或經(jīng)典電動(dòng)力學(xué)。之所以稱為經(jīng)典,是因?yàn)樗话ìF(xiàn)代的量子電動(dòng)力學(xué)的內(nèi)容。電動(dòng)力學(xué)這樣一個(gè)術(shù)語(yǔ)使用并不是非常嚴(yán)格,有時(shí)它也用來(lái)指電磁學(xué)中去除了靜電學(xué)、靜磁學(xué)后剩下的部分,是指電磁學(xué)
2020-06-10 10:31:083320 人工神經(jīng)網(wǎng)絡(luò)就是模擬人思維的第二種方式。這是一個(gè)非線性動(dòng)力學(xué)系統(tǒng), 其特色在于信息的分布式存儲(chǔ)和并行協(xié)同處理。雖然單個(gè)神經(jīng)元的結(jié)構(gòu)極其簡(jiǎn)單, 功能有限,但大量神經(jīng)元構(gòu)成的網(wǎng)絡(luò)系統(tǒng)所能實(shí)現(xiàn)的行為卻是極其豐富多彩的。神經(jīng)網(wǎng)絡(luò)的研究?jī)?nèi)容相當(dāng)廣泛, 反映了多學(xué)科交叉技術(shù)領(lǐng)域的特點(diǎn)。
2021-02-25 09:58:0013 掌握連續(xù)Hopfield神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)和運(yùn)行機(jī)制,理解連續(xù)Hopfield神經(jīng)網(wǎng)絡(luò)用于優(yōu)化計(jì)算的基本原理,掌握連續(xù)Hopfield神經(jīng)網(wǎng)絡(luò)用于優(yōu)化計(jì)算的一般步驟。
2021-05-31 17:02:2543 基于層級(jí)循環(huán)神經(jīng)網(wǎng)絡(luò)的X線線圖像腰椎識(shí)別
2021-06-27 11:24:4623 基于循環(huán)神經(jīng)網(wǎng)絡(luò)的Modbus/TCP安全漏洞測(cè)試
2021-06-27 16:39:1630 任何機(jī)械都有運(yùn)動(dòng),任何機(jī)械都受到力的作用。機(jī)械動(dòng)力學(xué)就是研究機(jī)械在力作用下的運(yùn)
動(dòng)和機(jī)械在運(yùn)動(dòng)中產(chǎn)生的力的科學(xué)。
動(dòng)力學(xué)和運(yùn)動(dòng)學(xué)一樣,研究分析與綜合兩方面的問(wèn)題。分析,就是進(jìn)行現(xiàn)有機(jī)械的研究;
綜合,是設(shè)計(jì)機(jī)械使之達(dá)到給定的運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)要求。分析是綜合的基礎(chǔ)。
2021-11-04 09:38:300 汽車操縱動(dòng)力學(xué)原理.2011年版 郭孔輝著
2021-11-21 09:38:110 ,是對(duì)人腦的抽象、簡(jiǎn)化和模擬,反映人腦的基本特性。人工神經(jīng)網(wǎng)絡(luò)的研究是從人腦的生理結(jié)構(gòu)出發(fā)來(lái)研究人的智能行為,模擬人腦信息處理的功能。它是根植于神經(jīng)科學(xué)、數(shù)學(xué)、統(tǒng)計(jì)學(xué)、物理學(xué)、計(jì)算機(jī)科學(xué)及工程等學(xué)科的一種技術(shù)。
2022-04-11 11:28:350 硅的三相、基于酸的濕法蝕刻中的傳輸和動(dòng)力學(xué)效應(yīng)的研究已經(jīng)完成。由反應(yīng)形成的氣泡附著在表面上的隨機(jī)位置,表面的一部分被反應(yīng)物遮蔽。這種氣泡掩蔽效應(yīng)被模擬為與液相傳質(zhì)阻力平行作用的氣泡傳輸阻力。這些輸運(yùn)
2022-04-15 14:50:46663 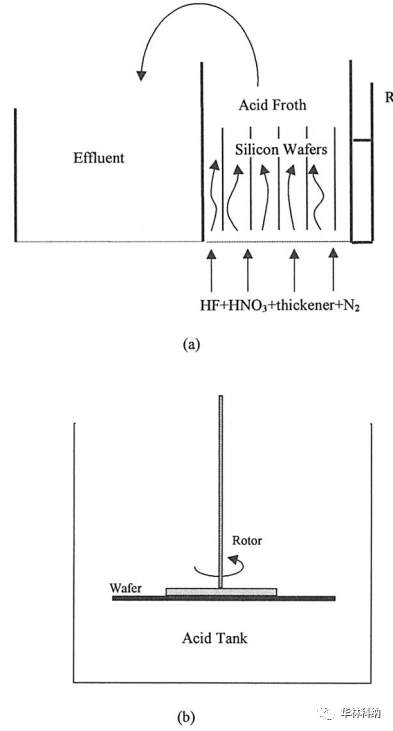
GROMACS是一個(gè)功能強(qiáng)大的分子動(dòng)力學(xué)的模擬軟件,其在模擬大量分子系統(tǒng)的牛頓運(yùn)動(dòng)方面具有極大的優(yōu)勢(shì)。 它可以用分子動(dòng)力學(xué)、隨機(jī)動(dòng)力學(xué)或者路徑積分方法模擬溶液或晶體中的任意分子,進(jìn)行分子能量的最小化
2022-11-14 15:26:591105 
電子發(fā)燒友網(wǎng)站提供《PyTorch教程之循環(huán)神經(jīng)網(wǎng)絡(luò).pdf》資料免費(fèi)下載
2023-06-05 09:52:330 動(dòng)力學(xué)仿真計(jì)算技術(shù)用來(lái)確定慣性、阻尼起重要作用時(shí)結(jié)構(gòu)動(dòng)力特性計(jì)算技術(shù)。結(jié)構(gòu)動(dòng)載計(jì)算分析滿足但動(dòng)力學(xué)分析要求不一定滿足
2023-06-05 09:30:081016 
積神經(jīng)網(wǎng)絡(luò)計(jì)算公式 神經(jīng)網(wǎng)絡(luò)是一種類似于人腦的神經(jīng)系統(tǒng)的計(jì)算模型,它是一種可以用來(lái)進(jìn)行模式識(shí)別、分類、預(yù)測(cè)等任務(wù)的強(qiáng)大工具。在深度學(xué)習(xí)領(lǐng)域,深度神經(jīng)網(wǎng)絡(luò)已成為最為重要的算法之一。在本文中,我們將重點(diǎn)
2023-08-21 16:49:35981 基于車輛運(yùn)動(dòng)學(xué)模型的方法忽略了車輛的動(dòng)力學(xué)特性,因此在 車速過(guò)快 或者 曲率變化率過(guò)大 的情況下該算法無(wú)法滿足車輛的穩(wěn)定性控制要求。 這里介紹一種典型的基于車輛動(dòng)力學(xué)模型的橫向控制方法,包括: 車輛
2023-11-15 16:47:48246 
。 不同的建模原理可以得到機(jī)械臂不同的動(dòng)力學(xué)表達(dá)式,有些算法可以求解出機(jī)械臂的正向和逆向問(wèn)題,而有些算法只能求解出正向或者逆向問(wèn)題。 衡量一個(gè)動(dòng)力學(xué)模型和軟件的指標(biāo)是計(jì)算效率,計(jì)算精度,收斂性,穩(wěn)定性,通用性和
2023-11-17 17:03:34284 控制器如計(jì)算力矩控制(Compute Torque Control)和阻抗控制(ImpedanceControl)等均需要使用機(jī)器人動(dòng)力學(xué)模型。 機(jī)器人系統(tǒng)模型包括機(jī)器人動(dòng)力學(xué)模型和機(jī)器人運(yùn)動(dòng)學(xué)模型,不精確動(dòng)力學(xué)模型可能會(huì)導(dǎo)致控制性能的降低,甚至?xí)鹣到y(tǒng)的不穩(wěn)定。 常用的機(jī)器人動(dòng)力學(xué)
2023-11-17 17:43:55361
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論