 電子發燒友App
電子發燒友App


在這篇文章中,我將嘗試找出關于極點和零點的物理感覺,使用運算放大器來控制它們在復平面中的位置,并利用電路的自然響應來說明極點/零點位置的影響。
單端口電路的自然響應
我們來看圖1中的無源線性單端口電路,它包括電阻、電容和電感。
圖1:(a)無源單端口電路 (b)自然(或無源)開路響應vn(t)。
如果我們施加一個測試電流I(s),單端口電路將產生電壓V(s),使得V(s)=Z(s)/(s),其中I(s)和V(s)是所施加電流和所產生電壓的拉普拉斯變換,s是以sec-1為單位的復數頻率。阻抗Z(s)是s的有理函數形式,即分子多項式N(s)與分母多項式D(s)的比值:
公式N(s)=0的根被稱為Z(s)的零點,表示為z1,z2,……;而公式D(s)=0的根被稱為Z(s)的極點,表示為p1、p2、……。極點和零點統稱為根,也稱為臨界頻率。例如,阻抗:
當s=0時,其值為零;當s=-3±j4時,它具有復共軛極點對。可以用根來表達它,即:
如果我們繪制|Z(s)|相對于s的幅度曲線,則可以直觀理解零點和極點的含義。所得到的曲線就好像在s平面上豎起的帳篷,在零點處接觸s平面,而在極點處其高度變為無限。
圖2:Z(s)=(10Ω)s/(s2+6s+25)的幅度圖。(通過在虛軸上計算|Z|獲得的分布曲線圖顯示出單端口電路的交流響應。)
為了找到極點的物理感覺,我們在s接近極點pk時施加電流I(s),就可以用相當小的I(s)獲得給定的電壓V(s)。s越接近極點pk,獲得給定電壓V(s)所需的電流I(s)越小。在s→pk的極限狀態下,即使電流為零,即開路,單端口電路也會獲得一個非零的供電電壓(見圖1b)!這個電壓稱為自然響應或無源響應,因為單端口電路可利用儲存在其電容和電感內部的能量來產生電壓。這些能量在電阻中消耗盡了,在無源單端口的情況下,它們將隨時間呈指數級衰減。實際上,系統理論預測到自然響應符合以下表達式:
其中a1,a2,。..。..,是取決于存儲能量的合適系數(以V為單位),Z(s)的極點是指數中時間常數的倒數。
那么Z(s)的零點呢?我們來看圖3,它表示圖1的兩種情況。現在施加的信號是電壓V(s),而響應是電流I(s)=[1/Z(s)]V(s),這表明Z(s)的零點現在成為1/Z(s)的極點。通過雙重推理,在s→zk的極限狀態下,即使施加零電壓(短路),單端口電路也將提供非零電流(參見圖3b)!該電流稱為自然響應或無源響應,因為單端口電路利用儲存在其電容和電感內部的能量來產生電流。系統理論預測自然短路電流響應符合以下表達式:
其中b1,b2,。..。..,是取決于存儲能量的合適系數(以安培為單位),Z(s)的零點是指數中時間常數的倒數。
圖3:(a)無源單端口電路(b)自然(或無源)短路響應in(t)。
總而言之,單端口電路的自然響應由其阻抗Z(s)的根控制:極點控制開路電壓響應vn(t),而零點控制短路電流響應in(t)。在某種程度上,根就像是單端口電路的DNA。例如,我們來看圖4的單端口電路。在t=0時,電容兩端的電壓為9V,頂部為正,t》0時它的自然響應是什么?可以看出單端口電路呈現的阻抗是:
顯然,z1=–1/(R1C)=-1/(10ms),p1=-1/[(R1+R2)C]=-1/(30ms)。此外,a1=[20/(10+20)]9=6V且b1=9/10=0.9mA。所以:
圖4:找出(a)開路和(b)短路的自然響應。
單極點控制
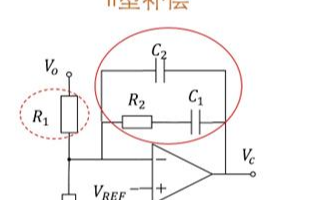
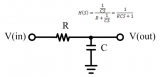
在圖5a的電路中,由vn表示的節點和地之間的阻抗為Z(s)=R||(1/sC)=R/(1+sRC),因此在s=-1/(RC)=-1/(1ms)時電路具有一個極點。假設vn(0)=1V,我們可以得到:
圖5:(a)基本電路(b)相同的電路,但可以控制極點。
無論怎樣選擇R和C的值,該電路的極點將始終為負。我們希望找到控制它的方法,以便將其驅動為零甚至使其成為正的。圖5b示出的電路可以完成這項工作。非反相放大器檢測vn并輸出電壓:
(1 + R2/R1)vn = (1 + k)vn
k = R2/R1
其中R2代表電位器在其左端和游標之間的部分。對于給定的元件值,從左端到右端改變游標將使k在0《k《2的范圍內變化。現在,R3上的電壓為(1+k)vn–vn,即kvn,在右邊是正的,表明R3將為C提供電流kvn/R3。鑒于R從C中汲取電流vn/R,因此從C流出的凈電流為iC=vn[1/R+1/(-R3/k)],表明C視R與一個負電阻–R3/k并聯,凈等效電阻Req=R||(–R3/k)]。擴展后可以得到:
對于給定的元件值,我們有Req=(10kΩ)/(1–k),因此極點位置現在為s=-1/(ReqC)=-(1–k)/(1ms),公式(4)變為:
我們討論一下電路作為游標設置函數的工作原理,使用圖6中的PSpice電路來顯示隨后的自然響應類型。
● 當游標一直向左(k=0)時,R3上的電壓降為零,因此R3帶有零電流,C通過R放電,時間常數為1ms,如公式(4)所示;
● 將游標向右移動時,R3將電流提供給C,只要該電流小于R汲取的電流,C仍然會呈指數放電,但速度比k=0時要慢;
● 當游標處于中間(k=1)時,R3輸出的電流等于R汲取的電流,電容的凈電流為零,因此電容電壓保持恒定;
● 將游標進一步向右移動(k》1),使得源電流大于汲取電流,因此C呈指數充電,從而產生不同的響應,直到運放飽和。
圖6:PSpice電路顯示不同k值的自然響應,假設電容最初充電電壓為1V。
圖7描繪了隨k變化的極點位置。
圖7:極點軌跡是k的函數。
極點對控制
在圖8a的電路中,干擾產生自然響應vn(t)的阻抗是:
D(s)的階數表明我們現在有一個二階系統。對于這樣的系統,D(s)通常以更方便的形式表達:
其中ζ稱為阻尼比,ω0稱為無阻尼固有頻率。設D(s)=0,可以得到極點對:
比較公式(8)和(9),我們發現圖8a的電路具有:ζ=1.5和ω0=1/(RC)=1/(1ms)。代入公式(10)得到極點對p1=-1/(0.3818ms),p2=-1/(2.618ms),表示vn(t)由一對指數衰減組成,因為電阻消耗了存儲在電容中的電能。
為簡單起見,假設圖8a的RC對完全相同。可以看出,無論我們怎樣選擇元件值,該電路的極點將始終為負實數。
圖8:(a)基本電路(b)相同的電路,但可以控制極點。
我們希望可以找到方法來控制它們在復平面上的位置,以便將它們放置在虛軸上,甚至使它們溢出到復平面的右半部分。圖8b示出了可完成這項工作的電路。其中最左邊的電容被提升離地,由一個非反相放大器驅動,該放大器檢測到vn并輸出電壓(1+R2/R1)vn=(1+k)vn,k如公式(5)所示。對于給定的元件值,從左端到右端改變游標將使k在0《k《3的范圍內變化。這樣做的目的是想通過改變k值,使運算放大器通過最左邊電容注入的能量改變甚至超過電阻消耗的電能。
使用熟悉的電路分析技巧,我們發現干擾產生自然響應vn(t)的阻抗為:
表明2-k=2ζ,或:
ω0=1/(RC)=1/(1ms)。我們來討論電路隨游標設置變化的工作原理,同樣,使用圖9a的PSpice電路來顯示隨后的自然響應類型,如圖9b所示。
● 隨著游標一直向左滑動(k=0),可以得到ζ=1。公式(10)得到重合的極點對p1=p2=-1/(1ms)。在這種情況下,系統理論預測該類型的自然響應為:
其中a和b是適合的系數,取決于t=0時存儲在電容中的能量。如圖9b所示,在初始浪涌之后,自然響應呈指數衰減至趨于零。
● 設k=2,得到ζ=0,所以公式(10)預測純虛極點對p1,2=±j103,其中j是虛數單位(j2=-1)。使用歐拉公式exp(jα)+exp(–jα)=2cosα,可以看出自然響應現在采用這種形式:
圖9:PSpice電路顯示對應于不同k值的自然響應,假設在t=0時,Ca充電到1V,Cb放電。
其中a和φ是適合的系數,取決于t=0時存儲在電容中的能量。其結果是持續振蕩,也稱為無阻尼振蕩(因此稱為ω0)。物理上,運算放大器注入單端口電路的能量等于端口電阻消耗的能量,這讓電容以某種乒乓方式交換能量。
● 對于0《k《2,有1》ζ》0,所以現在公式(10)可以預測一對復共軛極點。例如,當k=1.5時,由公式(12)得到ζ=0.25,因此由公式(10)得到:
代入公式(2),合并,并再次使用歐拉公式,將得到自然響應公式:
其中a和φ是適合的系數,取決于t=0時存儲在電容中的能量。
如圖9b所示,對于k=1.5,電容仍然以乒乓方式開始交換能量,但是該能量逐漸被電阻消耗,從而產生阻尼振蕩。
● 將k提高到2以上,使運算放大器注入的能量超過端口電阻可以消耗的能量,引起發散振蕩,如圖9b中k=2.1所示。振蕩將持續增長到運算放大器飽和為止。
圖10示出了隨k變化的根軌跡。總而言之,無源電路的極點位于復平面的左半部分。為了使它們溢出到右半平面,我們需要一個有源元件,例如示例中的運算放大器,從自己的電源端獲取能量并將其注入單端口電路。右半平面的極點導致發散的響應,最終使放大器飽和。
圖10:(a)作為k的函數的根軌跡(b)在阻尼響應狀態下的極點對。
一個流行應用
我們的電路控制極點對位置的能力可用于產生持續的正弦波。為此,它需要滿足兩個條件。
● 為了可以自己啟動,電路的初始配置必須使其極點對位于復平面的右半部分(k》2.0)。
圖11:在虛軸上放置并保持一對極點,以產生正弦波。
即使兩個電容最初都放電,運算放大器的一點噪聲輸入就足以觸發不斷增長的振蕩。
● 一旦振蕩達到所需幅度,就必須采取一些機制進行干預,以防止其進一步增長,并將其保持在該幅度。這需要將極點對放置在虛軸(k=2.0)上,并自動保持極點在其上,不管元件老化和漂移,或者任何其它干擾。
在圖11a中,電源接通時,兩個二極管仍然關閉,因此k=R2/R1=22/10=2.2,表明振蕩增加。隨著振蕩的增加,二極管在交替的半周期內逐漸導通,所以k=[R2||(R3+rd)]/R1,其中rd是動態二極管電阻(rd隨二極管電流而減小)。在rd《《R3的極限情況下,我們將得到k=(22||100)/10=1.8,表示電路可在1.8《k《2.2的范圍內調整k的值,這包括k=2.0時持續振蕩達到所需幅度的情況。
假如由于某種原因實際幅度超過期望值,rd將減小并導致k降至2.0以下,從而抵消幅度上升。相反,如果幅度降至所需值以下,rd將增加并使k上升到2.0以上,從而抵消幅度下降。總之,只有k=2.0時電路才能找到它的“和平”狀態。“啊,這就是負反饋的魔力!”
責任編輯:gt










 工商網監
工商網監
評論