 電子發燒友App
電子發燒友App


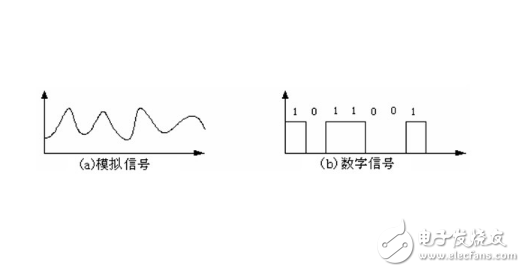
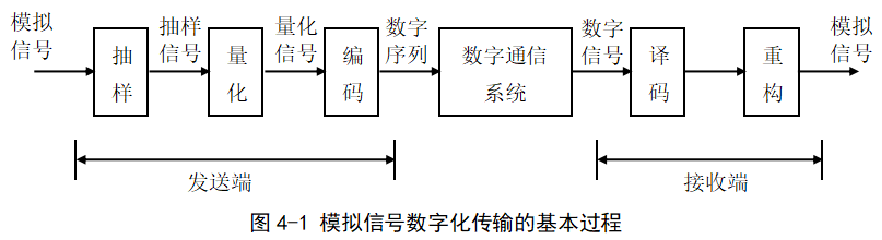
大多數創客項目的核心都是數字式的,但傳感器通常是模擬器件,需要進行信號處理,才能與處理器模擬輸入對接。但是,低信號幅度、補償電壓或干擾信號問題可能導致信號電平超出處理器的數字化儀的數字輸入范圍,使得創客的設計流程變得復雜。
有些資深創客知道這些問題,但有些創客已經忘記了模擬技術的基本知識,甚至還有很多創客對模擬技術一無所知。針對所有這些群體,本文將介紹模擬信號處理/調節的作用,提供幾個典型的設計要求、約束和利弊取舍示例。
同時會介紹實例器件及其應用方式,并探討能夠加快項目設計與開發的低成本或免費的設計工具,以幫助開發人員控制住緊張的預算。鑒于很多創客項目的資源是有限的,本文還將深入探討哪些資源可以重復使用,以進一步節省成本。
信號處理和運算放大器
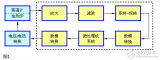
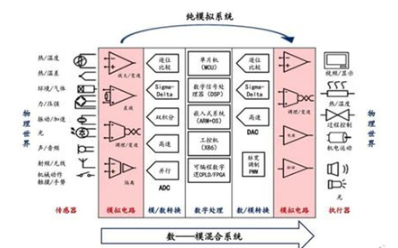
傳感器和數字處理器之間的模擬信號處理(或調節)的目標是在將模擬信號轉化為數字信號之前,最大程度地減少任何有害的模擬效應。此外,我們還可以使用低成本的運算放大器實現傳感器信號的放大、相移和濾波,使得信號完全兼容處理器輸入,從而經濟高效地完成信號處理。
另外,信號處理可以擴展傳感器的特征,例如對加速計的輸出進行積分運算,以獲取速度和位移信號。
運算放大器是直流耦合、高增益的電壓放大器,使用差分輸入,通常產生單端輸出。過去,運算放大器用于實現進行微分方程求解的模擬計算器。
由于具備通用性,運算放大器現在成為很多模擬電路的基本構件,包括模擬信號處理。它們廣泛應用于消費、工業和科學設備中。由于具備低成本、隨時可獲取的優勢,因此它們也非常適合創客/DIY 項目。
利用負反饋,運算放大器電路的各個參數可由外部元器件控制,包括增益、帶寬以及輸入和輸出阻抗等。運用良好的設計實踐,運算放大器的性能大多不會受到制造偏差或環境條件的影響。
我們以 Texas Instruments TL081 運算放大器為例(圖 1)。
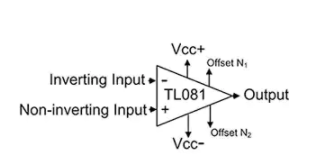
圖 1:展示 Texas Instruments TL081 運算放大器上連接的草圖(圖片來源:Digi-Key Electronics)
這種典型運算放大器帶有反相和非反相差分輸入引腳和單個輸出。輸入使用結型場效應晶體管 (JFET) 來確保高輸入阻抗和極低偏置電流(30 皮安 (pA))。該放大器的典型大信號差分增益大于 100,000(直流時),單位增益帶寬積為 3 MHz。它使用通孔式封裝(兼容原型開發板)和表面貼裝式封裝。
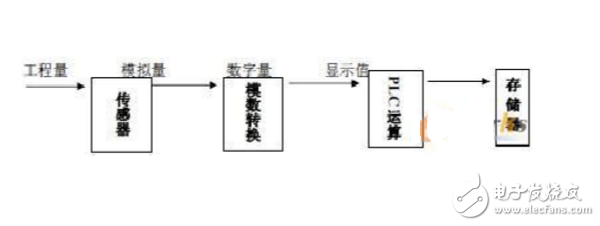
匹配傳感器與模數轉換器
創客處理器,例如 Arduino 板,包含用于讀取模擬傳感器的模擬通道輸入。例如,Arduino Uno 有六個模擬輸入。這些輸入被復用到一個 10 位模數轉換器 (ADC)。這個 10 位 ADC 將輸入電壓范圍劃為 210 份或 1024 個電壓電平(值從 0 到 1023)。
ADC 輸入范圍取決于所選的模擬基準電壓。如果使用 Arduino Uno,則默認基準電壓為 5 伏。它還有一個 1.1 伏的內部基準電壓,或者用戶可以輸入 0 至 5 伏之間的外部基準電壓。ADC 將映射 0 伏至所選模擬基準電壓之間的電壓。對于默認的 5 伏基準電壓,ADC 會映射 0 至 5 伏之間的 1024 個電平,每個電平間隔 4.88 毫伏 (mV)。要轉換雙極信號,零電平是 ADC 范圍的一半。在本例中應為 2.5 伏。該轉換器代碼被分配相應的值,0 伏為最大負信號值,5 伏為最大正信號值,2.5 伏正好在這個范圍的中間。
現在,我們以某變送器(如駐極體麥克風)的信號為例,該信號的幅度僅為 2 mV。信號幅度小于本例中的 ADC 的最小有效電平。要將麥克風與該 ADC 一起使用,就需要放大信號。此外,信號電平必須進行相移,使得其中心在大約 2.5 伏的位置。可以使用運算放大器實現這些更改。此外,還可使用配置為濾波器的運算放大器,對信號進行頻段限制,以覆蓋所需的音頻范圍。
放大器配置
運算放大器具有差分輸入,可設計為反相或非反相放大器(圖 2)。
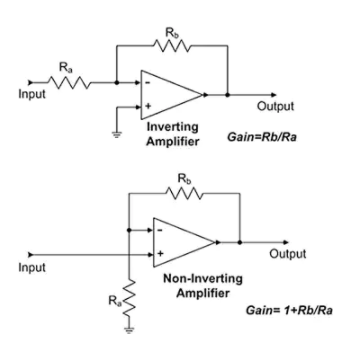
圖 2:兩種基本運算放大器配置:反相和非反相(圖片來源:Digi-Key Electronics)
運算放大器的差分輸入有反相輸入和非反相輸入,分別以減號 (-) 和加號 (+) 表示。施加到反相輸入上的信號產生的輸出會發生 180 度相移(反相)。相反,非反相輸入的信號的輸出同相。
每種配置的增益僅取決于外部電阻器 Ra 和 Rb。導致這個結果的原因是運算放大器的高開路增益,也是因為從輸出到反相輸入通過電阻器 Rb 使用了負反饋。請注意,反相放大器的增益取決于 Rb 與 Ra 之比。非反相放大器配置的增益為 1 + Rb/Ra。
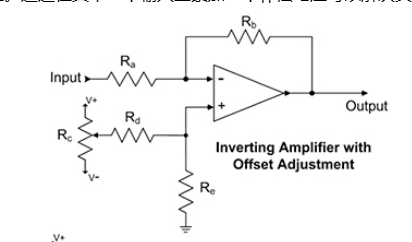
該圖顯示了運算放大器如何獲得增益。通過在其中一個輸入上累加一個補償電壓可以解決實現固定 DC 相移的問題(圖 3)。
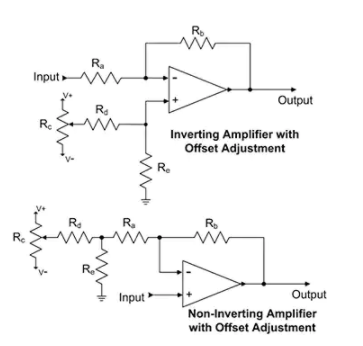
圖 3:用于向反相和非反相運算放大器配置添加相移的技術。(圖片來源:Digi-Key Electronics)
通過一個簡單的分壓器即可為反相或非反相輸入累加補償電壓。請注意,補償電壓會受級增益影響。在設計放大器時,必須牢記這一點。
設計工具
能夠提供放大、濾波或同時提供這兩個功能的運算放大器電路有很多。有些運算放大器制造商會提供免費的設計工具,幫助評估這些電路,無需實際購買組件和構建原型。我們以 Texas Instruments 為例。他們提供了一個名為 TINA-TI 的免費電路仿真程序,這是一種類 Spice 電路仿真器。Texas Instruments 還在該程序中打包提供元器件模型庫和電路示例,用戶能夠輕松上手(圖 4)。
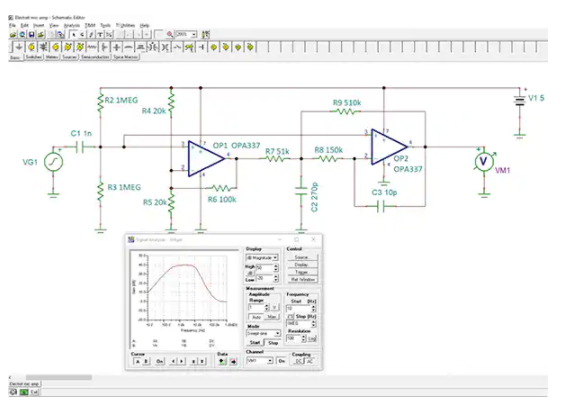
圖 4:旨在匹配駐極體麥克風與 Arduino 板的 TINA-TI 放大器/濾波器仿真。它采用 300-10,000 Hz 帶通濾波器,提供的增益為 100。(圖片來源:Digi-Key Electronics)
該電路使用了兩個 Texas Instruments OPA337NA-3K 運算放大器。該運算放大器是為電池供電型設備設計的,支持單電源供電、偏置電流小于 10 pA 的 JFET 輸入,以及 3 MHz 增益帶寬積。
圖 4 中的 OP1 配置為非反相放大器,增益為 10 (20 dB)。OP2 設置為多反饋低通濾波器,截止頻率為 10 kHz。該級的增益也為 10。這兩個級聯級提供的整體增益為 100 (40 dB)。輸入是 AC 耦合型,上限截止頻率大約為 300 Hz。加上低通濾波器,構成覆蓋 300 至 10,000 Hz 頻段的帶通濾波器。
使用內置虛擬儀器,例如 DVM、信號發生器、示波器和信號分析儀,可以測試電路性能。電路性能顯示在虛擬信號分析儀上。該圖顯示了作為頻率函數的增益。它驗證了 300 Hz 至 10 kHz 頻段上的增益為 40 dB。
通過 R4 和 R5 設置的分壓器也會造成偏壓,為處理器 ADC 產生 2.5 伏的電壓偏置。
最終放大器電路
最終放大器電路(圖 5)顯示了駐極體麥克風及其偏置電阻器。
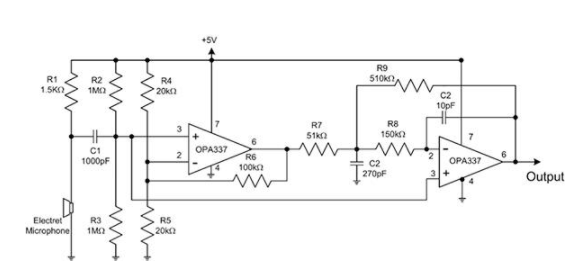
圖 5:包括駐極體麥克風及其相關偏置電阻器的放大器完整原理圖(圖片來源:Digi-Key Electronics)
這是最終版電路,使用與 Arduino 板相同的 5 伏電源供電。電阻器 R1 為麥克風提供必需的偏置電流。所有其他元器件都與圖 4 中的仿真放大器相同。
單變送器,多輸出
過去,運算放大器一直用于微分方程求解。這就需要對信號進行微分和積分運算。使用這種功能,可對加速計的輸出進行一次積分運算,以讀取速度。如果速度信號進行了積分運算,則輸出就是位移。這意味著使用運算放大器對信號進行積分運算,信號傳感器的輸出可以產生三個不同的信號。從單個加速計可以讀取加速度、速度和位移(圖 6)。
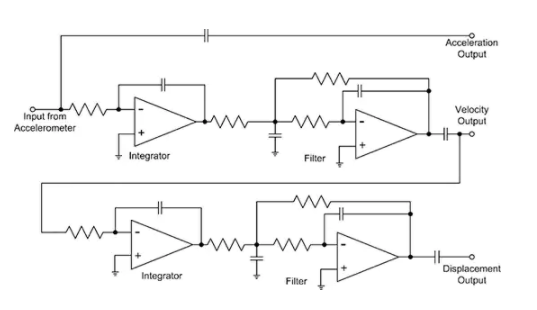
圖 6:使用雙積分器從提供加速度信號的加速計產生加速度、速度和位移讀數。(圖片來源:Digi-Key Electronics)。
來自加速計的信號被直接輸出;它還進行一次積分運算,以產生速度輸出。速度信號再進行一次積分運算可產生位移信號。
該積分器在其反饋回路中使用了帶有電容器的運算放大器。在本例中,后面還使用了第二運算放大器,作為低通濾波器連接以限制產生噪聲的信號帶寬。這種技術在多種商用加速計信號調節電源中都有使用。
使用運算放大器作為積分器時,要記住以下幾點。第一,積分器經常出現漂移;來自運算放大器的任何偏置電流都會在反饋電容器上積累電荷,從而導致輸出電壓。使用偏置電流極低的運算放大器,例如 TL081 和 OPA337,可以最大程度地減少這個問題。
當信號進行積分運算時,會為信號加上一個積分常數。這個常數的值取決于初始條件。該電路使用 AC 耦合來消除這些 DC 常數。結果是速度和位移信號僅讀取相對值。因此,在位移信號中,您只能看到位移的變化,而不是絕對位移。對于振動測量等應用而言,這不會有任何問題,因為它們只需要位移的變化。但它不能用于確定加速計位置的絕對變化。
了解關于運算放大器的更多信息
我們提供了多種運算放大器培訓套件,可幫助您研究和了解如何應用這些實用的信號處理器件。其中最好一個的培訓套件是 MikroElektronika 提供的 Pro Analog 系統實驗室套件。該套件是與 Texas Instruments 聯合開發的,提供了十四個使用運算放大器及相關模擬處理元件的實驗。該課程的內容遠比本文所提供的示例來得豐富。
總結
在涉及傳感器和數字處理器的項目中,運算放大器是創客和 DIY 愛好者需要了解和應用的關鍵模擬信號處理器件。運算放大器可以提供增益,控制補償電壓,對模擬信號進行濾波,還可對傳感器輸出進行微分或積分運算,以確保傳感器和處理器接口得到最佳匹配。它們可在大多數業余愛好者的有限預算范圍內,很好地完成這些任務。















 工商網監
工商網監
評論