對于卡爾曼濾波的理解說到底,濾波,數(shù)據(jù)融合什么的就是一個數(shù)據(jù)修正,那么,如果我使用數(shù)字濾波器,將傳感器的數(shù)據(jù)進(jìn)行效果比較好的濾波,那么是否可以拋棄卡爾曼濾波呢?在一個合適的時間,用加速度和磁傳感器
2015-06-11 16:02:41
卡爾曼濾波的估計值能很好的逼近真實值,我的疑惑是,這和濾波有什么關(guān)系,請高手介紹下卡爾曼算法是如何濾波的?
2013-07-04 22:57:04
卡爾曼濾波的噪聲協(xié)方差怎么配置啊?
2017-08-01 10:05:29
a往南向北 2019-01-16 20:39:20 11340 收藏 111分類專欄: C語言嵌入式 文章標(biāo)簽: 卡爾曼濾波 C代碼卡爾曼濾波理論很容易就可以在MATLAB軟件環(huán)境下實現(xiàn),但是,實際
2021-08-17 09:10:43
卡爾曼濾波c++代碼,基于mpu6050的,非常好使。親測有效。
2020-04-18 14:32:48
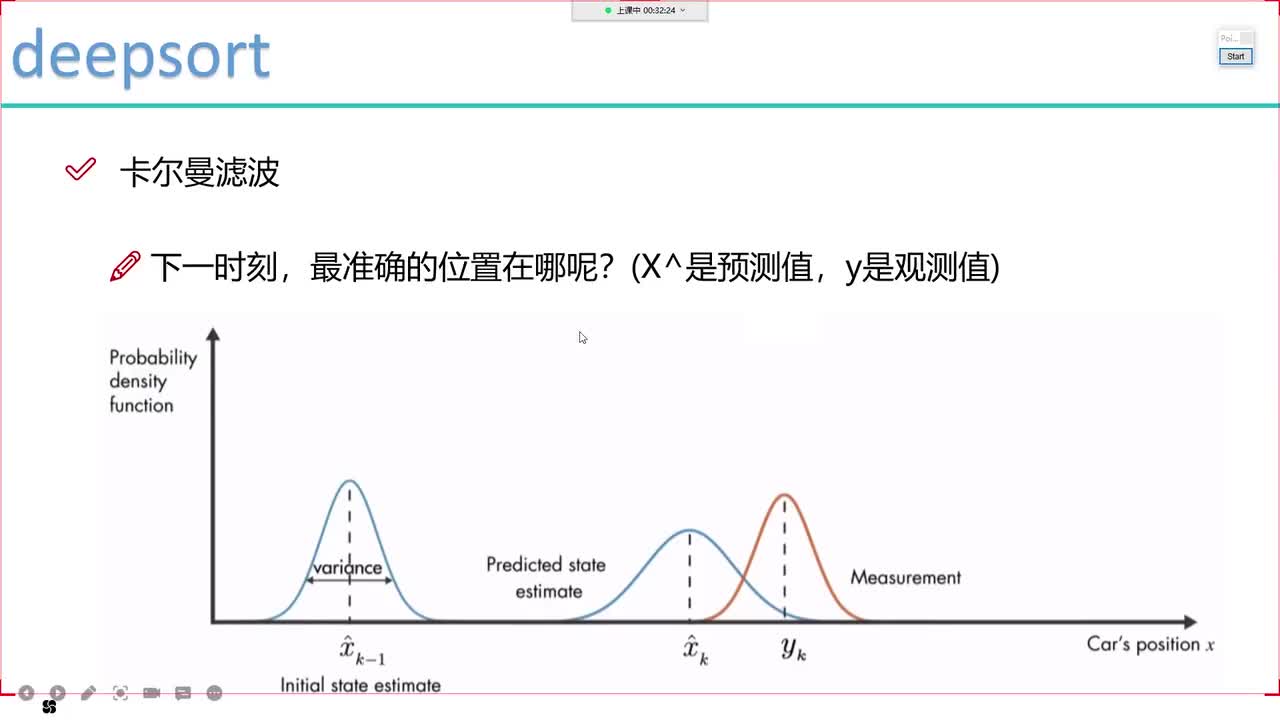
在控制領(lǐng)域,獲取控制對象**精確**的當(dāng)前狀態(tài)至關(guān)重要。但是在傳感器測量過程中由于**自身誤差**和**外部干擾**導(dǎo)致采樣值不準(zhǔn)確,卡爾曼濾波的作用就是為了**糾正**(correct)這些不準(zhǔn)確,從而得到較準(zhǔn)確的“**狀態(tài)值**”(采樣數(shù)據(jù));
2021-08-18 07:50:49
請問卡爾曼濾波在labview中如何實現(xiàn)
2012-12-11 17:53:19
卡爾曼濾波在信號處理方面用的是比較多的,資料也是非常多的,這里就不寫了。自適應(yīng)卡爾曼濾波也有很多文獻(xiàn)有相關(guān)的介紹,其中用的比較多的有基于Sage-Husa算法實現(xiàn)的。這段時間剛好用到,順便做了一個
2021-08-18 06:49:31
卡爾曼濾波在四軸飛行器上的實際運用
2017-04-02 12:39:08
卡爾曼濾波器是屬于一個高通濾波器還是帶通濾波器
2023-10-11 06:58:07
卡爾曼濾波風(fēng)力發(fā)電機中的風(fēng)速估計,轉(zhuǎn)速估計甚至扭矩估計都設(shè)計到卡爾曼濾波,如果只是單一傳感變量的平滑處理也能用到卡爾曼濾波。振動信號中的濾波大多采用低通去除高頻噪音,而卡爾曼濾波則是通過不確定度把
2021-07-12 06:00:47
想寫一個卡爾曼濾波程序,目前依照網(wǎng)上的說法寫的總是不成功,哪位有經(jīng)驗的請指教一下,感激不盡,我是在labview編程環(huán)境下嘗試的
2017-05-21 20:18:08
卡爾曼濾波的原理和實現(xiàn)
2020-06-01 17:28:24
轉(zhuǎn)在學(xué)習(xí)卡爾曼濾波器之前,首先看看為什么叫“卡爾曼”。跟其他著名的理論(例如傅立葉變換,泰勒級數(shù)等等)一樣,卡爾曼也是一個人的名字,而跟他們不同的是,他是個現(xiàn)代人!卡爾曼全名Rudolf Emil
2016-09-21 11:41:07
卡爾曼濾波的基本原理及應(yīng)用
2020-05-05 09:26:15
在陀螺儀和加速度計中使用卡爾曼濾波static float P[2][2] = {{ 1, 0 }, { 0, 1 }};//協(xié)方差矩陣P的兩列代表陀螺儀、加速度計兩維,那兩行代表什么呢?為什么P的數(shù)組元素是{{ 1, 0 }, { 0, 1 }}而不是其他值?
2013-11-04 21:06:10
在這里我就不介紹卡爾曼的數(shù)學(xué)推算了,網(wǎng)上的數(shù)學(xué)推導(dǎo)一抓一大把,如果想了解推導(dǎo)過程的小伙伴可以去大佬的博客。如果你是想直接簡單運用卡爾曼濾波來處理mpu6050的數(shù)據(jù),或者是處理ADC的數(shù)據(jù),那么我
2022-02-28 14:24:57
已知測量值和原始值,但測量噪聲和觀測噪聲未知,如何進(jìn)行卡爾曼濾波。之前看了好像可以用自適應(yīng)卡爾曼,但不是很懂,求例子,最好有注釋的
2017-03-23 19:12:17
卡爾曼濾波算法對比其他的濾波算法有什么優(yōu)點
2023-10-11 06:42:24
卡爾曼濾波算法是怎么實現(xiàn)對數(shù)據(jù)的預(yù)測處理的
2023-10-10 08:28:02
請問,為什么在卡爾曼濾波器模型中,要大R 小Q,原因是什么?圖1 R = 5000 * eye(2);Q = eye(6);圖2 R = 500 * eye(2); Q = eye(6);請問哪種情況追蹤效果好?
2016-05-12 18:02:53
卡爾曼濾波輸出的時候延時很大要怎么解決
2023-10-11 08:10:15
卡爾曼濾波器介紹
2016-08-17 12:06:34
切性質(zhì)。這篇文章介紹了離散卡爾曼理論和實用方法,包括卡爾曼濾波器及其衍生:擴展卡爾曼濾波器的描述和討論,并給出了一個相對簡單的帶圖實例。
2008-07-14 13:06:49
卡爾曼濾波器原理的學(xué)習(xí)理解
2016-08-17 12:38:55
一、前言卡爾曼濾波器是一種最優(yōu)線性狀態(tài)估計方法(等價于“在最小均方誤差準(zhǔn)則下的最佳線性濾波器”),所謂狀態(tài)估計就是通過數(shù)學(xué)方法尋求與觀測數(shù)據(jù)最佳擬合的狀態(tài)向量。在移動機器人導(dǎo)航方面,卡爾曼濾波是最常
2021-11-16 09:10:40
[開發(fā)工具] STM32算法的翅膀之MATLAB基于加速度計與氣壓計的三階卡爾曼濾波計算加速度、速度及高度主要介紹了卡爾曼濾波器的使用原理,給出了matlab代碼,并在STM32F407平臺對卡爾曼濾波器進(jìn)行了驗證,傳感器為MPU6050與DPS310,測試結(jié)果令人滿意,速度與高度無累積...
2021-08-17 07:02:07
最近兩日在看卡爾曼濾波。看完理論后,從網(wǎng)上搜索了一段代碼來看,然后就懵逼了。這段代碼被人轉(zhuǎn)的次數(shù)特別多,應(yīng)該做飛控的都用過。不知道各位有沒有自己推導(dǎo)過。反正我是中間有一步不太懂。在這里先把自己弄懂
2019-08-04 19:41:37
及噪聲協(xié)方差;估計階段由回歸模型代替狀態(tài)方程和觀測方程,相應(yīng)的噪聲協(xié)方差實時自適應(yīng)調(diào)整.該方法克服了傳統(tǒng)方法容易受系統(tǒng)動態(tài)模型不確定性和噪聲協(xié)方差不準(zhǔn)確限制的問題,仿真結(jié)果驗證了算法的有效性卡爾曼濾波器算法(C語言)
2011-10-24 09:59:04
本帖最后由 huangdewen 于 2015-4-8 23:19 編輯
收藏的一些關(guān)于卡爾曼濾波算法的教程,簡單易懂自己寫的代碼#define dt 0.001//微分時間#define
2013-09-13 17:52:42
卡爾曼濾波器通俗講解
2016-08-17 12:06:59
最近正在學(xué)習(xí)卡爾曼濾波算法,用LabVIEW仿照C語言寫了個一維的卡爾曼濾波程序,不知寫的對不對,發(fā)上來希望大家指正。
2017-10-21 21:15:50
這是總體的濾波效果這是放大的版的可以看出,卡爾曼和二階基本在重合在一起,一階也還好,也沒有差得太遠(yuǎn)。這里是從一放在桌子上一段時間后再進(jìn)行測試的,可以看出一階的跟隨性上面要比其他二個都要好。響應(yīng)要快
2022-02-10 07:06:48
最近一直被卡爾曼濾波困擾,希望哪位研究這方面的朋友能夠指點一下,不要太多理論數(shù)學(xué),基本思路加上一定的代碼就好,萬分感謝
2013-10-26 17:29:46
[共享] 卡爾曼濾波算法在TI TMS320C6713 DSP上的實現(xiàn)
2011-08-20 23:23:18
labview中,去哪下載卡爾曼濾波器工具包,能給個網(wǎng)址么?謝謝了~~~~~
2013-12-16 15:44:09
最近想做四軸飛行器,在論壇看到這個帖子MikroKopter:來自德國的開源四軸飛行器項目bbs.elecfans.com/jishu_475743_1_1.html小弟看過之后對其中有些內(nèi)容不太了解,四軸飛行器不是卡爾曼濾波最好嗎?這個mikrokopter的代碼是不是用的卡爾曼濾波器?
2015-06-11 17:27:38
,傳感器返回值都是不夠準(zhǔn)確的。需要用DSP芯片對飛行器各飛行模態(tài)的傳感器返回信息進(jìn)行處理,處理的算法是根據(jù)卡爾曼濾波理論開發(fā)的。這個項目的核心就是用DSP芯片對卡爾曼濾波算法進(jìn)行實現(xiàn),難點是研究出一種效果好的卡爾曼濾波算法。
2015-10-09 15:12:30
前一段時間看到一篇論文,里面有一部分講解卡爾曼濾波,感覺講的挺簡單易懂的,現(xiàn)在分享一下只講不分享不是真漢紙!!這里有卡爾曼濾波器simulink模型,這里作為濾波器用。如果改變一些參數(shù),也可以做辨識用。一碼多用,朋友們要記得回復(fù)啊~
2015-06-05 15:26:39
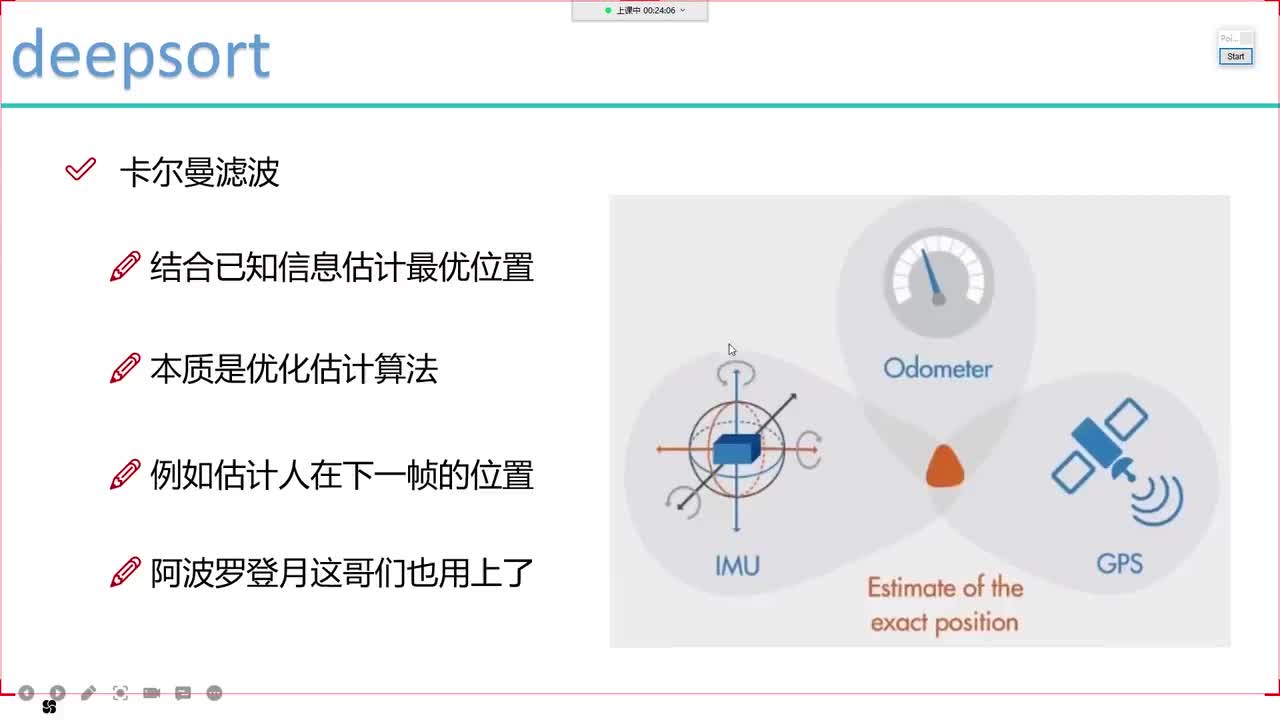
過程。 斯坦利·施密特(Stanley Schmidt)首次實現(xiàn)了卡爾曼濾波器。卡爾曼在NASA埃姆斯研究中心訪問時,發(fā)現(xiàn)他的方法對于解決阿波羅計劃的軌道預(yù)測很有用,后來阿波羅飛船的導(dǎo)航電腦使用了
2019-07-14 06:30:00
看到的一篇關(guān)于卡爾曼濾波的講座PPT,比看純課本有條理的多,現(xiàn)在分享給大家,共同進(jìn)步哦
2015-06-11 17:46:14
本篇博客講解了一階卡爾曼濾波原理、ADC讀取紅外測距傳感器的cube配置和代碼實現(xiàn),運用了均值濾波。
2022-01-11 06:09:12
什么是卡爾曼濾波?具有哪些參數(shù)?
2021-09-30 08:50:30
估計很多使用mpu6050的人看網(wǎng)上卡爾曼濾波資料時看不懂下面這段程序,我找到一個資料,對其進(jìn)行了解釋。P[0][0] += dt * (dt*P[1][1] - P[0][1] - P[1][0
2017-03-25 21:07:57
網(wǎng)上搜到一篇關(guān)于卡爾曼濾波算法的論文,對低維卡爾曼濾波算法作了幾何解釋,這種解釋對卡爾曼濾波有一種直觀的理解,使人們對卡爾曼濾波有更本質(zhì)的認(rèn)識。有需要的童鞋帶走吧
2015-06-11 15:28:33
對照(3.36)到式(3.40),理解濾波過程 X_pre = F*Xkf(k - 1);%狀態(tài)預(yù)測 X_pre為上一次卡爾曼濾波值 P_pre = F*P(k - 1)*F + Q; %協(xié)方差預(yù)測
2019-08-01 04:35:51
://blog.csdn.net/u011344545==========================================本文設(shè)計了一種基于STM32/51單片機的使用MPU6050傳感器的利用卡爾曼濾波器算法的角度測量儀(直接上代碼)代碼下載(附PPT)MPU-6050 :是6軸運動處理
2022-02-10 07:57:19
= q3 * norm;這是單變量的卡爾曼濾波器:float KalmanGain;//卡爾曼增益float EstimateCovariance;//估計協(xié)方差float
2015-05-22 15:12:20
如何改進(jìn)基于Sage-Husa的自適應(yīng)卡爾曼濾波?
2021-11-22 07:35:35
1. 卡爾曼濾波器的介紹為了可以更加容易的理解卡爾曼濾波器,這里會應(yīng)用形象的描述方法來講解,而不是像大多數(shù)參考書那樣羅列一大堆的數(shù)學(xué)公式和數(shù)學(xué)符號。但是,他的5條公式是其核心內(nèi)容。結(jié)合現(xiàn)代的計算機
2015-05-22 10:47:54
/*卡爾曼濾波器整理By 乙酸氧鈹*/#include "kalman.h"double
2022-01-07 08:08:47
怎樣去設(shè)計一種基于加速度計與氣壓計的三階卡爾曼濾波器呢?怎樣在matlab的simulink中去調(diào)用C語言并進(jìn)行仿真呢?
2021-11-18 06:45:56
` 本帖最后由 Struggle! 于 2015-5-22 11:02 編輯
逛博客看到的一篇講解卡爾曼濾波的文章,發(fā)現(xiàn)程序十分簡潔易懂,而且使用效果不錯,是一個學(xué)習(xí)的典范,在此分享了!下面附上
2015-05-22 10:58:16
有偏卡爾曼濾波器可以用來消除無線定位中的非視距誤差,首次使用有偏卡爾曼濾波器的參考文獻(xiàn)是下面兩篇論文[1]劉琚,李靜.一種在非視距環(huán)境中的TDOA/AOA混合定位方法[J].通信學(xué)報,2005,26
2011-11-07 13:55:15
有一組周期性的數(shù)據(jù),計劃通過小波分析去除噪聲,卡爾曼濾波進(jìn)行預(yù)測去除偶然的晃動,具體內(nèi)容協(xié)商,有償。
2018-08-23 17:29:53
翻了一些論文,大多都是堆一下公式,然后用DSP Builder有沒有用verilog實現(xiàn)過卡爾曼濾波器的?想討論一下。整個算法實現(xiàn)下來,最大運行頻率是多少?從輸入到輸出延時有多少?耗費資源情況大概怎樣?
2017-09-13 10:01:01
有沒有基于9軸傳感器的三階卡爾曼濾波器算法
2023-11-06 06:00:44
系統(tǒng)動態(tài)模型不確定性和噪聲協(xié)方差不準(zhǔn)確限制的問題,仿真結(jié)果驗證了算法的有效性【關(guān)鍵詞】:高斯過程回歸;;平方根無跡卡爾曼濾波器;;自適應(yīng)【DOI】:CNKI:SUN:KZLY.0.2010-02-005
2010-04-24 09:04:39
卡爾曼濾波有什么用,怎么用?電調(diào)有什么用?小白,剛接觸四軸不懂。求大神解答
2019-04-18 01:12:59
課設(shè)題目:轉(zhuǎn)換測量卡爾曼濾波器的設(shè)計與實現(xiàn)--- 其中的 “轉(zhuǎn)換測量“是什么意思啊?基于matlab的。各位朋友能否具體講解下,舉個例子闡釋什么的。這個課設(shè)題目要求我在matlab上用卡爾曼濾波器
2013-01-15 12:29:16
Approach toLinear Filtering and Prediction Problems》(線性濾波與預(yù)測問題的新方法中提出了這種算法。簡單來說,卡爾曼濾波器是一個“optimal recursive
2016-06-17 14:59:09
卡爾曼濾波器可以從數(shù)據(jù)序列中排除干擾噪聲,使用卡爾曼濾波器可以從不完整的信息給出一個不斷變化中復(fù)雜系統(tǒng)的最優(yōu)估計。我們把某種網(wǎng)絡(luò)抽象為一個電阻,現(xiàn)在我們要用傳感器(當(dāng)然不是簡單的萬用表歐姆檔測電阻哈
2019-05-22 07:06:05
(英文版)MATLAB在卡爾曼濾波器中應(yīng)用的理論與實踐KalmanfilteringtheoryandpracticeusingMATLAB-email
2020-03-12 12:35:17
離散卡爾曼濾波器1960年,卡爾曼發(fā)表了他著名的用遞歸方法解決離散數(shù)據(jù)線性濾波問題的論文[Kalman60] 。從那以后,得益于數(shù)字計算技術(shù)的進(jìn)步,卡爾曼濾波器已成為推廣
2008-07-14 13:03:57 0
0 現(xiàn)代濾波器理論與設(shè)計:
現(xiàn)代濾波器理論與設(shè)計
2009-03-19 17:24:0064 介紹了基于多傳感器信息融合技術(shù)的聯(lián)合卡爾曼濾波器的一般設(shè)計方法,并將此方法運用于艦船INS/ GPS/ Loran2C 組合導(dǎo)航系統(tǒng)中。理論分析與仿真結(jié)果表明,該聯(lián)合卡爾曼濾波器的設(shè)計合
2009-06-25 08:35:4132 介紹了基于多傳感器信息融合技術(shù)的聯(lián)合卡爾曼濾波器的一般設(shè)計方法,并將此方法運用于艦船$I& L MN& L %D)*5 O 0 組合導(dǎo)航系統(tǒng)中。理論分析與仿真結(jié)果表明,該聯(lián)合卡爾曼
2009-07-11 11:05:5017 本文首先分析了當(dāng)前入侵檢測系統(tǒng)中存在的不足,指出了將卡爾曼濾波器應(yīng)用在入侵檢測系統(tǒng)的好處,并且詳細(xì)介紹了信號處理和卡爾曼濾波理論,接下來又給出了一個基于卡爾曼
2009-08-06 08:38:3232 介紹卡爾曼濾波器及其各種衍生方法。首先給出卡爾曼濾波器的算法流程以及所有參數(shù)的含義,并對影響濾波效果的
五個主要參數(shù)進(jìn)行了討論。然后通過仿真實驗研究不同的參數(shù)取值對于卡爾曼濾波的影響。最后總結(jié)在不同應(yīng)用場景下使用卡爾
曼濾波器的宗旨和要點。
2016-06-21 17:56:396 卡爾曼濾波器在國內(nèi)外已廣泛應(yīng)用于自動控制、運動技術(shù)、火箭動力學(xué)、宇宙飛行息及其他工程領(lǐng)城。本書較系統(tǒng)地介紹了卡爾曼濾被器的基本理論和方法。全書共分三章。第一章,介紹卡爾曼濾波器的基本理論和方法
2020-03-13 08:00:0037 基于卡爾曼濾波器的PID設(shè)計教程
2021-06-03 10:27:4134 MATLAB在卡爾曼濾波器中應(yīng)用的理論與實踐Kalma(英文版)
2021-10-18 10:06:580 卡爾曼濾波器及其應(yīng)用基礎(chǔ).敬喜編
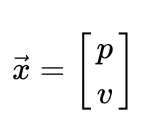
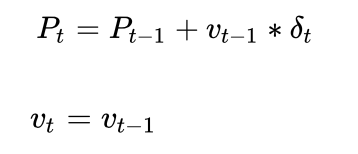
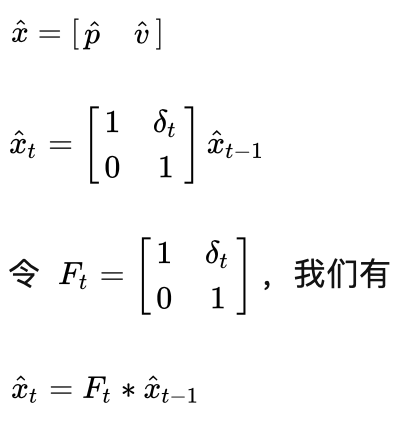
2021-10-18 10:14:570 曼理論應(yīng)用到非線性系統(tǒng)的擴展卡爾曼算法 Extended Kalman Filter(EKF)[2]。相比于線性卡爾曼濾波器,擴展卡爾曼濾波器有更廣的適用范圍[3, 4],更高的狀態(tài)估計精度,可以處理任意更新頻率的系統(tǒng)。 有了上文的基礎(chǔ),這里,我們將通過一個二維小車的例子并來介紹擴展卡爾曼濾波的原理。
2022-08-12 10:06:32 4595
4595 
卡爾曼濾波常用于動態(tài)多變化系統(tǒng)中的狀態(tài)估計,是一種通用性強的自回歸濾波器。它的由來和NASA登月有關(guān)。其發(fā)明者魯?shù)婪?E.卡爾曼在一次訪問NASA的時候,發(fā)現(xiàn)阿波羅計劃中一個難點是軌道預(yù)測問題,因而
2023-02-10 14:31:41201 
卡爾曼濾波器是一種基礎(chǔ)預(yù)測定位算法。原理非常簡單易懂。核心過程可以用一個圖說明。
2023-05-09 17:30:35596 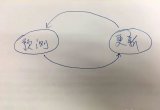
 電子發(fā)燒友App
電子發(fā)燒友App
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論