 電子發燒友App
電子發燒友App


公司:凌力爾特公司(現隸屬 Analog Devices 公司)
作者:軍用航空市場經理 Steve Munns
引言
現代無人操作軍用系統已經成為全世界武裝部隊不可或缺的組成部分,國防行業不斷對這類系統進行密集的開發,以使其能夠發揮大范圍攻擊、監視和作戰支持的作用。無人操作系統也許是如今的國防行業中最具活力的領域,全球年支出超過 55 億美元,到 2024 年,預計這一數字將接近 100 億美元[1]。
無人駕駛航空器 (Unmanned Aerial Vehicle, UAV) 領域令人吃驚的一面是,系統種類極其豐富,從有些重量不到 20 克的纖巧納米無人駕駛航空器 (Nano UAV,NUAV) 到中型 UAV,例如質量為 450 千克、有效載荷能力為 150 千克的守望者 (Watchkeeper),直至起飛重量超過 5000 千克的 MQ-9 收割者 (MQ-9 Reaper) (以前名為捕食者 B (Predator B)),跨度之大、種類之多令人嘆為觀止。
UAV 無論大小,在平衡其性能和任務續航時間時,尺寸、重量和功率 (Size, Weight and Power,SWaP) 都是需要考慮的關鍵因素。有大量電子系統可以采用,但是在本文中,考慮電子系統時的關注點將落在以下幾個方面:
· 空中運行安全性和自主運行
· 傳感器和數據處理
· 電源系統
早期無人操作系統簡介
現代 UAV 的起源可以追溯到 100 多年前,不過人們可能將 1930 年代用作空中目標打擊練習的無線電控制無人駕駛飛機視作最知名的 UAV 鼻祖。英國制造了 400 多架這種飛機,當時以“蜂王”這個名字聞名于世,據說由于這種飛機而誕生了“無人駕駛飛機”這個術語。這種飛機要求,飛行時始終處于遙控飛機的飛行員的視線之內。不過沒過多久,人們就開始嘗試超出視距范圍的自主飛行了。在 1940 年,愛德華·索倫森 (Edward M. Sorensen) 為他的地面站發明申請了專利,在這項發明中,使用頻率調制技術控制飛機,并讀回視距范圍以外的飛行信息。之所以有了這項專利,是因為人們認識到,需要一種自動防止故障的模式,保持飛機平飛,并同時建立一個備份控制系統。
隨著戰時武器有效載荷的發展,以及后來在 1950 年代和 1960 年代偵查平臺的發展,無人操作軍用系統的復雜性也提高了。1960 年代早期的瑞恩 (Ryan) 無人駕駛飛機采用了基本的制導系統,該系統由可編程定時器、回轉羅盤和高度表組成,決定著離港飛行高度層、航向和飛行時間,這種飛機還提供倒轉和降落傘輔助著陸功能。盡管這些都是相當基本的功能,但是用膠片相機獲得影像的戰略意義以及半自主系統的優勢是很容易看到的,因此人們想更加齊心協力地進行進一步的開發。
空中飛行安全性和自主運行
顯然,飛行安全問題是至關重要的,人們已經就此問題展開了廣泛的辯論,以確定怎樣管制天空,才能使 UAV 的存在不會影響到現有空中交通的安全性,同時使軍用和民用 UAV 的應用開發不受制約。
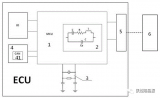
在視線范圍內飛行的小型 UAV 依靠遙控飛機的飛行員來判斷是否會發生碰撞,而自主或半自主運行的較大型 UAV 要想躲避空中碰撞,則需要復雜的檢測和躲避系統。人們正在為此開發多種傳感器,例如修改傳統飛機應答器、可視和紅外攝像機、激光探測與測距 (Light Detection and Ranging,LiDAR) 系統以及常規雷達系統。將來自這些傳感器系統的數據轉換成能夠反映所處環境的圖片,然后自主做出飛行決定,這需要非常復雜的軟件和硬件資源,而且對于分享民用空域的 UAV 而言,還需要在滿足現有協議要求的前提下運行。在友好空域中飛行時,使用地面雷達和交通繪圖資源降低機載系統復雜性、擴大監測范圍,也許是一種選擇,不過采用這種方式時,在數據鏈路可靠性、延遲等其他問題上要做出折中。ASTREA 計劃顯示,可以采用自主檢測和躲避技術,但是這種技術是在 Jetstream 飛機上采用的,這種飛機沒有 UAV 的功耗、尺寸和重量限制。調整這種技術以使其能夠用于大部分 UAV 是個很大的挑戰,不過采用先進的現場可編程門陣列 (FPGA)、數字信號處理 (DSP) 和高性能模擬電子器件,可以使這種技術實現微型化。給這類電子系統供電也不是個簡單任務,FPGA 需要嚴格的電源準確度以及低壓和大電流,這就要求仔細設計電源鏈,以最大限度降低功耗、減少產生的熱量。一種方法是使用數字電源系統管理 (PSM) 技術,這種技術通過動態調節電壓和頻率,可以降低功耗,從而有助于延長較小型 UAV 的任務續航時間。PSM 還提高了可靠性,并提供遙控和監視功能,以及能量使用記錄和“黑匣子”故障記錄功能。
圖 1:數字電源系統管理
傳感器和數據處理
即使最小型的、手動啟動的 NUAV 也可以攜帶多個攝像機和照相機完成監視任務,而多種版本的 MQ-9 收割者能夠滿足各種不同的獵殺及監視需求。攜帶武器的版本可能載有攝像機、紅外夜視攝像機以及在有云或煙霧時使用的合成孔徑雷達 (SAR),還有用于制導彈藥的激光測距儀和目標照明系統。提供誘餌和干擾功能的版本也已開發出來,同時戰術數據鏈路系統能夠直接向有人駕駛飛機發送目標信息及影像數據。在信號情報 (SIGINT) 領域預計將進行更多開發工作,隨著信號情報系統的進步,航程更長的版本將提供超過 40 小時的任務續航時間。由于機載傳感器的迅速增加以及任務續航時間的延長而產生了大量數據,這些數據必須壓縮和存儲或通過實時數據鏈路發送,這勢必導致某些方面的折中,例如帶寬、質量和可能的影像數據損失。
每增加一種新的有效載荷能力,都會增大電源系統的負擔。不過幸運的是,印刷電路板級電源解決方案的開發也取得了進步,最近幾年功率密度得到了顯著改進,凌力爾特公司的 μModule? (微型模塊) 穩壓器解決方案就是一種進步的技術。每個小型模塊都含有一個完整的高效率電源,其外形尺寸適合對尺寸要求很嚴格的應用,而且可靠性非常高。圖 2 顯示了一個例子。
圖 2:LTM4644 μModule 穩壓器
通信與信息安全
UAV 的通信鏈路可以分為兩部分:
· 飛行控制數據鏈路 - 用于遠程命令 (上行鏈路) 和遙測 (下行鏈路) 信息,以在 UAV 響應操作人員指令或按照 GPS 坐標自主飛行執行任務計劃時,對 UAV 進行監控。一般情況下,采用擴展頻譜技術的 56kbps 鏈路可以滿足飛行控制數據鏈路的需求,上行鏈路可以用 128 位加密算法和前向糾錯加以保護。
· 傳送有效載荷傳感器信息的通信鏈路 – 被看作是單獨的通信鏈路,高清視頻可能要求高達 10Mbps 的帶寬,同時運行 COFDM、MPEG-4 或類似調制方案。諸如收割者等大型 UAV 一般會結合使用租用的專用衛星中繼線路 (Ku 頻段) 和地面 (C 頻段) 通信線路,有充足的空間放置大型天線,而其他類型的無人機也許在工業、科研和醫療 (ISM) 頻段運行,例如 2.4GHz (WLAN) 和 5.8GHz 頻段。
與空中交通控制系統及協議的集成是實現 UAV 完全自主運行的另一個障礙,因為 UAV 需要響應語音命令,提供航向和飛行高度層信息,并通過 VHF 無線電頻道及合成語音確認系統,確認已接受命令。
信息安全風險包括故意或偶然的干擾;假冒或攔截命令及控制信號;通信通道衰減。在常規的有人駕駛飛行中,為了避開任何非常靠近的空中飛行物,飛行員可以立即動手控制飛機,顯然在使用 UAV 的情況下,飛行員始終要依靠通信鏈路以及機載傳感器的穩定運行。
風險總是可以減輕的,即使是非常小和按照一套設定 GPS 坐標飛行的 UAV,也可以升高飛行高度,以恢復丟失的 GPS 信號,在達到離港續航時間限制時自動返回基站。作為應變措施,防欺詐 GPS 系統結合使用 GPS 接收器和慣性測量單元,對接收到的 GPS 信號進行統計分析也有助于確定是否有人嘗試欺騙系統。
當然,所有這些通信系統都需要電源,而且敏感的無線電接收器需要一些噪聲非常低的電源,這樣無線電靈敏度才不會因電源而降低。新的芯片工藝技術和新穎的 IC 設計方法已經導致出現了一系列開創性產品,這些產品既能提供前所未有的高效率,噪聲又非常低,例如 LT8640 Silent Switcher? 和 LT3042 超低噪聲、超高 PSRR RF 線性穩壓器。
圖 3:LT8640 Silent Switcher 穩壓器
電源系統
本文之前已經強調過,一些 IC 級電源技術進步支持了 UAV 及傳感器有效載荷的持續變化,不過,機載動力源的選擇也是影響總體性能的核心因素。隨著人們日益專注于開發成本更低、尺寸更小、重量更輕的 UAV,內燃型動力源的吸引力下降了,燃料電池技術成為可能的選擇,尤其是對續航時間長、平均功率需求低的任務而言。
美洲獅 (Puma) 系列小型 UAV 正在試驗的一種燃料電池將飛行時間從 150 分鐘 (使用 LiSO2 電池時) 延長到將近 5 小時,整個燃料電池系統重約 2 千克,功率與重量之比約為 1kW/千克。
圖 4:UAV 動力源的功率與重量之比
Power-to-Weight Ratio:功率與重量之比
Solar PV:太陽能光伏電池
Lithium-Ion Battery Types:鋰離子型電池
Fuel Cells:燃料電池
Piston/Radial Engines:活塞 / 徑向引擎
Turbofan/Turboprop Engines:渦扇 / 渦槳發動機
Increasing Complexity and Cost:復雜性和成本逐漸提高
燃料電池的位置在電池和內燃機解決方案之間,具備環保優勢,但確實面臨一些燃料處理和存儲問題,不過通過在可更換燃料盒中存儲顆粒狀氫,可以克服這類問題。
小型 UAV 和 NUAV 最有可能繼續使用鋰離子電池,視配置不同而不同,用單節電池就能使 NUAV 飛行大約 30 分鐘。較長續航時間和較大型的型號將需要多節電池設計,這類設計可受益于用 LTC3300 等 IC 實現的電池容量平衡技術,這種技術可最大限度延長系統運行時間。飛行高度很高、充當偽衛星的 UAV,例如谷歌以及其他公司正在開發、將來擬用于提供互聯網服務的 UAV,也可以用太陽能動力取代電池。這類系統需要在因輻射作用增強可能導致單粒子翻轉的環境中保持可靠運行,因此復雜性會提高,而且也許需要專門規定所使用 IC 的特性,并對這些 IC 進行專門測試。
結論
現在,無人操作系統在武裝部隊中起著不可或缺的作用,軍方提供的大量資金促進了這類系統的快速開發,開發焦點尤其集中在較小型、價格較低的 UAV 系統上。
隨著傳感器有效載荷和 UAV 平臺電子系統變得越來越復雜,電源鏈和機載動力源的效率對于提供足夠高的運行性能變得至關重要了,新型 IC 電源解決方案正在幫助實現 SWaP 目標。
飛行高度很高的 UAV 和續航時間非常長的任務正在推進對太陽能、燃料電池等新型電源的需求,而使用新型電源又意味著需要新型 IC。
參考資料
[1] http://www.tealgroup.com/index.php/about-teal-group-corporation/press-releases/118-2014-uav-press-release










 工商網監
工商網監
評論