 電子發燒友App
電子發燒友App


隨著無人機技術與實戰化應用的迅速發展,美國針對有人-無人機協同作戰模式、分布式蜂群作戰模式以及無人機消耗作戰模式等無人機智能作戰模式開展了諸多研究。其中主要包括“忠誠僚機”模式、SoSITE分布式作戰模式、有人-無人機自主性空中格斗模式、拒止環境下協同作戰模式、可快速部署與回收集群作戰、進攻性蜂群城市作戰模式,以及無人機集群消耗作戰模式等。基于對上述作戰模式的分析,在此進一步調研了高智能化作戰的技術發展方向,智能化“敏捷禿鷲”系統、未來天基指揮通信系統以及高度自動化與自動目標識別技術等都將是美國無人機智能作戰技術的重點研究方向。 ? ?
有人-無人機協同作戰模式研究 “忠誠僚機”模式 ? 無人機距離完全自主作戰仍需要具備對復雜戰場環境、戰場態勢的綜合分析與判斷能力以及對敵方戰術意圖的預判與響應能力等高智能化能力,因此有人-無人機協同作戰將是早期無人機智能作戰的主要模式。美國已經對該作戰模式進行了概念發展規劃,而“忠誠僚機”項目與Skyborg項目等則致力于該型作戰模式的技術研發,重點研究可重復使用的無人機,以及裝備于無人機的自主/人工智能系統等。XQ-58A無人機作為“忠誠僚機”項目的研究重點之一,可重復使用,已于2019年3月成功首飛,之后進行了多次飛行測試,也被作為使用Skyborg技術進行空軍實驗的平臺。
可重復使用無人機作戰模式示意圖 ? 該機的最大飛行速度約1050公里/小時,最大航程近4000公里,實用升限超過13700米,其可以攜帶多種電子設備,內置彈艙載荷250千克(可掛載聯合制導攻擊武器或小直徑炸彈等),具備對地打擊能力。在此將兩個項目的相關研究進行梳理,如下表所示。 ? 圖表:“忠誠僚機”項目與Skyborg項目
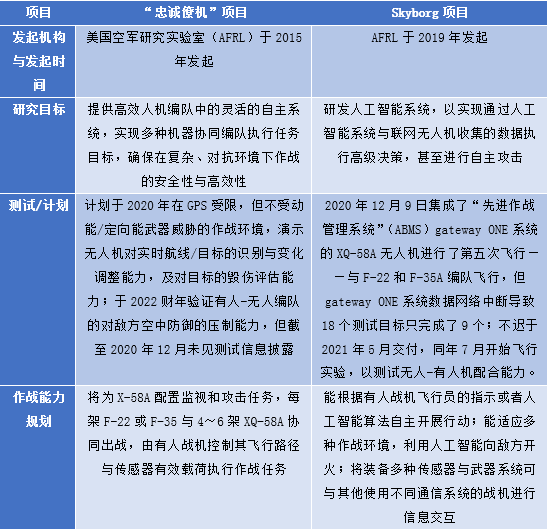
資料來源:調研整理 ? “忠誠僚機”項目的主要成果XQ-58A已經進行了多次飛行試驗,但其對地攻擊與對敵空中防御的相關演示與測試尚未見信息披露;而Skyborg項目則致力于發展人工智能,以使飛機能夠自主運行并有可能從先前的訓練任務中學習。Leidos公司作為為Skyborg的設計代理,已于2020年5月起開始專注于開發“自主核心系統”所需的技術,以最終使Skyborg無人機具備半獨立操作能力。AFRL計劃在2023財年提供Skyborg系統的初期作戰版本,后續版本則可能由下一代空中優勢(NGAD)項目或其他單獨項目資助。
? 據美軍的作戰構想顯示,美軍計劃于2023財年開始,洛克希德?馬丁公司的4架F-22戰斗機組成的編隊能夠與裝備了Skyborg人工智能系統的無人戰機共同執行任務,空戰司令部則計劃利用裝備Skyborg的無人機在2025年替換部分F-16戰斗機,在2030替換MQ-9無人機。然而根據最新測試結果可知,采用人工智能技術并執行自主通信任務仍然是該項目亟待解決的技術難題之一。 ?
分布式作戰體系構建
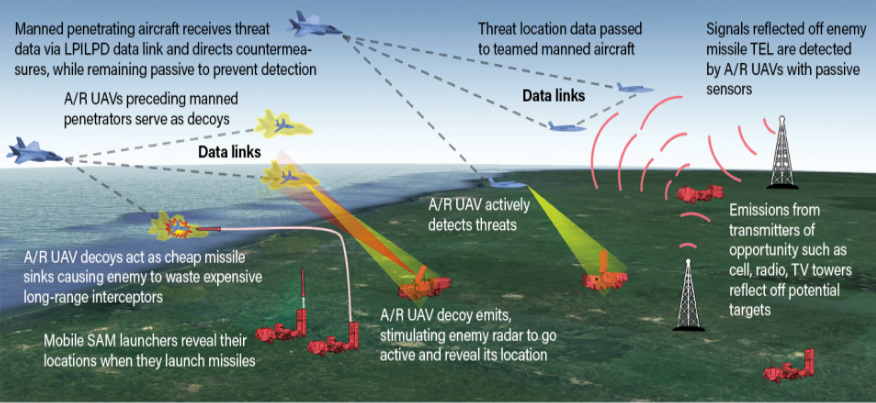
建立分布集成、全域覆蓋的“殺傷網”是美軍全域聯合作戰行動的主旨所在,而實現有人-無人機協同作戰的信息交互與無縫連接等則是其研究重點之一,因此,美國國防部高級研究計劃局(DARPA)于2015年提出了體系集成技術與試驗(SoSITE)項目。該項目旨在將武器與傳感器載荷從單一龐大的空中平臺拆分到大量有人和無人平臺上,運用開放系統架構方法,實現平臺間實時數據共享、多機組網、協同配合及平臺上不同任務模塊的即裝即用、無縫連接,形成分布式的空中作戰體系。 ? 早在2018年DARPA已經在開發適應性算法與軟件等以建立配備先進任務系統的有人-無人機作戰網絡,并且進一步探究了自主技術在推進各個平臺協同作戰中所發揮的作用。該項目將有助于加快美國空軍先進作戰管理系統達到初步作戰能力的進度。 ? 在SoSITE項目所設想的作戰模式中,只需單架次有人機與單架次無人機即可執行任務,由空中指控系統控制有人機,再由有人機控制無人機,具有電子干擾、雷達探測和成像能力以及有殺傷力的武器裝備將由無人機平臺發射,而非將這些能力全部集中于同一作戰平臺上,由此將兼具低成本與出色的作戰效果。 ?
SoSITE項目分布式空戰概念圖
該項目組已經成功演示驗證了以下四種能力: ?
即使采用傳統數據鏈,亦能夠實現多個系統之間自動組合和傳輸信息的能力;
首次在飛行中使用Link-16創建更為快速、高效的現代化信息交互;
實現了將陸基座艙模擬器與真實飛機系統實時互聯的能力,基于SoS減少了從數據到決策的時間跨度;
將當前在F-35上使用的APG-81雷達與DARPA的“自動目標識別”軟件進行集成,創建一個全面綜合的戰場空間圖像。
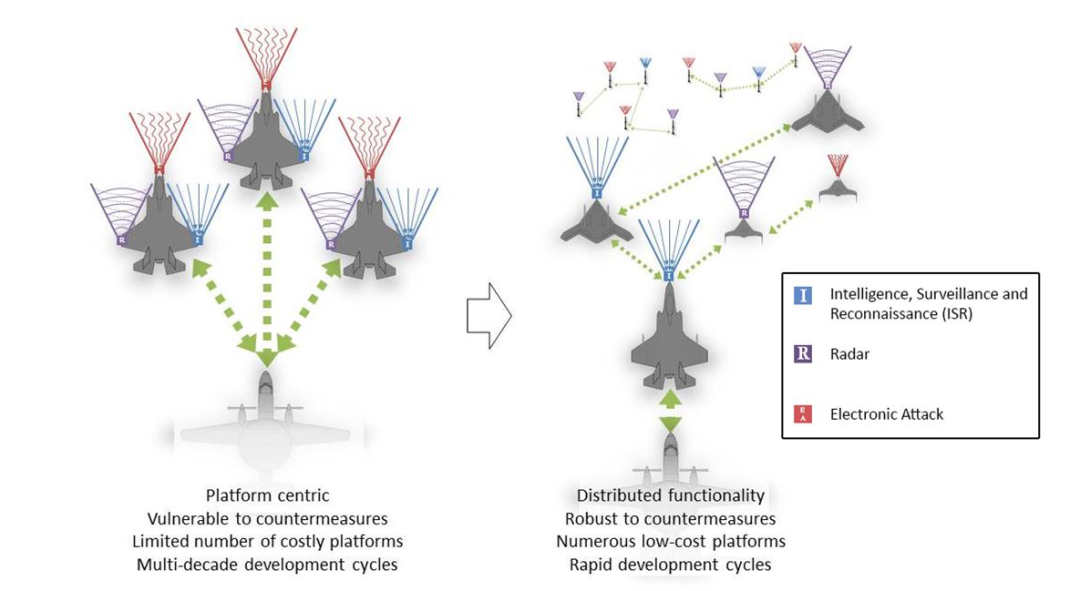
該項目的最終目標是從以平臺為中心的戰斗力模型轉變為依靠異構、低成本平臺的多種組合中的分布式功能的模型。 ? 波音公司和美海軍已于2020年2月4日在美海軍作戰發展司令部舉辦的年度艦隊演習中成功利用一架有人駕駛型EA-18G電子戰飛機控制了兩架無人版“EA-18G”飛機,由此驗證了該項目相關技術的有效性,并將進一步推動F/A-18E/F戰斗機與“EA-18G”電子戰飛機控制無人機等無人平臺執行作戰任務的進程。 ? 該項測試中有兩點關鍵技術尤其引人關注,一是對“EA-18G”電子戰飛機進行改裝,并采用開放式架構處理器與先進網絡實現該機的無人駕駛;二是有人機控制無人機的技術。此外,據稱經無人化改裝的有人機還可與美海軍在研的其他無人系統協同作戰,能夠大幅提升美海軍的態勢感知能力以及有人飛機的生存能力。 ? 結合該次測試與美國的技術應用慣性推想,美國有可能會將即將退役的F-16戰機改裝為無人戰機,并采用F-22與F-35等先進戰機與無人機進行協同作戰,最終實現單架次有人機控制多架無人機形成編隊作戰的目標。 ?
有人-無人機自主性空中格斗模式
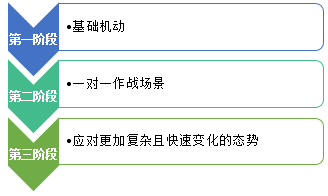
將無人機用于實戰,空中格斗必將是其未來要面對的作戰模式之一,但目前無人機的自主性尚且不足以實現該能力,因此基于可靠的人工智能軟件,利用有人-無人機協同,實現自主空戰格斗能力是現階段美國的研究主線之一。DARPA已經于2019年授予卡爾斯潘公司4年期的研發全尺寸空戰試驗基礎設施的“空戰演化”(ACE)項目,旨在提高作戰人員對自主作戰技術的信任度,是戰略技術辦公室(STO)旨在實現DARPA“馬賽克戰”的戰略項目之一,而馬賽克戰又是將戰爭概念從空戰專屬于有人機,轉變為有人機和低成本無人機的混合編隊,從而實現利用最新技術進行快速研發、部署與升級,以應對變化莫測的威脅。 ? 該項目將培訓人工智能(AI)遵守空戰規則,并將按如下三個階段開展工作。 ?
目前該項目尚且處于研究工作的第一階段,并將開展的名為“Alpha Dogfight試驗”的空中格斗競賽作為研發空對空自動作戰軟件的第一步。該競賽由不同公司研發的AI與駕駛虛擬F-16的人類飛行員對決,競賽的最終結果為赫倫系統公司研發的超級AI于2020年8月20日在虛擬空戰中以5:0的戰績擊敗了駕駛虛擬F-16戰斗機的人類飛行員。由此驗證了AI算法進行空戰的能力,同時也將助力ACE項目基于參賽的AI技術研發出更為可靠的人工智能空中格斗軟件,從而進一步促進人機協同作戰編隊的發展。 ? 卡爾斯潘公司還將使用其專有的自主電傳線控飛行控制系統技術,對4架Aero Vodochody L-39 Albatros噴氣教練機進行改裝,以實現和演示先進的人機界面(HMI)和AI算法。 ? 此外,DARPA還于2020年11月選定波音公司、埃皮塞公司(EpiSci)、佐治亞理工學院、蒼鷺系統公司和物理人工智能公司開發智能空戰算法,以實現有人-無人飛機編隊的近距離自主空戰格斗能力。該項研究將在ACE項目下進行“技術領域1”(TA1)內容的研發工作,包括單機和編隊的空戰機動算法。每家機構將分別從1對1空戰格斗開始研究,逐步擴展至2對1和2對2,隨后轉入建模仿真、縮比例無人機驗證和全尺寸飛機驗證階段,計劃于2023年完成全部工作。 ? 現階段,美國在有人-無人機協同作戰模式方面的研究重點在于,研發可靠的“自主核心系統”實現無人機的“半獨立”操作能力;采用開放系統架構,實現有人-無人機平臺之間的實時數據共享、多機組網、協同配合與無縫連接等,以形成分布式的空中作戰體系;研究可靠的人工智能空中格斗軟件,以及單機和編隊的空戰機動算法等,以提升有人-無人機協同作戰的自主空中格斗能力。 ?
分布式無人機智能蜂群作戰樣式研究 ? 拒止環境下協同作戰模式
該型作戰模式下,現有的大多數系統需要由專門的飛行員與傳感器操作員進行操作,既限制了無人機操作的可擴展性與經濟性,也增加了在復雜電磁環境中對于高機動目標的動態、遠程對抗的操作難度。因此針對上述問題,DARPA于2014年啟動了拒止環境中協同作戰(CODE)項目。該項目致力于創建人工智能算法與模塊化軟件架構,拓展現有無人機執行任務的能力,提升無人機蜂群的自主協作能力,能夠實現對帶寬限制和通訊中斷的彈性化設計,兼容現有標準,以進一步加強美軍在拒止環境或競爭性空域中執行任務的能力。 ? ?
CODE允許無人機與其他無人機一起自主工作,部分依賴于網絡通信系統,通過多個節點傳遞信號,而不局限于從單個傳輸點傳遞,實現多架無人機共享信息,從而使得敵方難于一次性封鎖所有節點;
CODE無人機群在執行任務的過程中可以相互或向指揮官分享數據,共同協商任務分配,實現行動同步。
CODE項目主要著眼于無人機群協同自主領域技術的提升,而其中的關鍵技術在于單架次無人機的自主能力、無人機群的自主能力、人機接口以及開放式架構,而飛機如何在惡劣的條件下繼續協同工作則是該項目最具挑戰性技術難點之一。在自主協作下,CODE軟件驅使的無人機集群能夠根據既定交戰規則,發現目標并接觸,以最小監督利用周圍配備CODE的平臺系統,并及時適應友軍消耗與動態威脅等動態環境。 ?
在此將較具代表性的測試任務進行梳理如下所示。 ?
2019年2月裝備CODE軟件的6架RQ-23無人機與14架虛擬無人機在無法使用GPS,通信中斷的情況下,針對虛擬目標與威脅等采取了對策,成功地完成了任務目標。該次飛行試驗參與的無人機均由一個小型作戰中心的任務小組監控,并采用了雷神公司的軟件和自主算法等。
美國通用原子公司于2020年12月4日稱,在無人工輸入的情況下,CODE項目研發的人工智能軟件控制“復仇者”無人機機動運行超過兩個小時,該次演示進一步深入研究了針對空對空目標的大型無人機平臺上的人工智能處理技術,并且采用支持網絡的戰術目標網絡技術(TTNT)進行了網狀網絡任務通信。
通用原子公司還擴展了CODE基本軟件的行為功能,將其安裝在小型商用計算機上,在設定飛行任務目標的情況下,即可協調6架飛機完成空對空協同搜索,其中五架虛擬飛機用于演示。該次演示的成功代表了無人機將向更復雜的自主能力發展,并且預示著人工輸入將最小化以實現復雜空戰中各平臺系統的最佳組合。 ? 總之,CODE項目已于2019年完成,項目的相關技術成果等已經移交給美國海軍航空系統司令部。該項目已經建立了超出了當前技術水平的模塊化軟件體系結構,能夠應對帶寬限制和通信中斷,在用于異構系統的自主技術研究方面已經邁出了重要的一步。 ?
可快速部署與回收的無人機集群作戰模式
采用無人機進行分布式集群作戰的難點之一在于小型無人機作戰半徑有限,無法實現遠程作戰,因此利用有人軍用飛機進行遠程投放與回收被美軍作為解決方案之一,小精靈(Gremlins)項目由此被DARPA于2015年啟動。該項目旨在研究一型低成本無人機,能夠搭載情報、監視、偵察(ISR)等傳感器模塊和非動能有效載荷,同時開發一個無人機發射和回收裝置,使得未來的作戰飛機可以快速部署廉價、可重復使用的無人機集群。 ? “小精靈”無人機的續航時間約1~3小時,按照DARPA的設想,“小精靈”無人機蜂群將在敵防區外由包括運輸機、轟炸機和戰斗機在內的各類平臺發射,在滲透到敵防區內之后,針對特定目標共同執行情監偵、電子攻擊或地理空間定位等作戰任務,任務完成后退出敵防區,并由C-130運輸機完成空中回收。
該項目包括四個階段,前兩個階段主要包括承包商的選拔以及全尺寸驗證系統的初始設計,第三階段則始于2018年主要進行多架無人機的發射與安全回收試驗,X-61A無人機是第三階段的演示目標之一。在此將該項目的最新測試進展梳理如下。
? 圖表:“小精靈”項目研究新進展
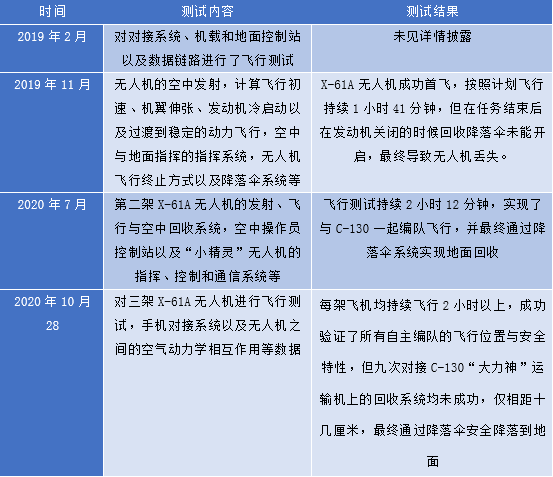
資料來源:調研整理
據稱第四次飛行與回收等測試將于2021年春季進行。此外,DARPA已于2020年與美國空軍達成協議,計劃在完成第三階段之后,開啟第四個階段,一方面開發協作自主軟件,以實現只需一名操作員即可控制多架無人機,從而使得無人機能夠在通信不暢或導航信號有限的地區與地面移動目標/海上目標進行長距離交戰;另一方面還可能會在“小精靈”無人機上裝載各種傳感器,以將不同的情報、監視和偵察傳感器集成在無人機的自主編隊中進行演示,但該型無人機尚不具備自主能力與人工智能能力。 ? 預計該項目的第四階段將持續27個月,最終測試將包括DARPA在CODE項目所開發的協作自主技術,其中,美國空軍自主的項目研究部分將為美國空軍提供作戰技術。 ?
進攻性蜂群城市作戰模式
美國的進攻性蜂群城市作戰模式在DARPA于2016年啟動的進攻性蜂群使能戰術(OFFSET)項目中被深入研究,該項目旨在通過集成已有的自主集群與人-無人集群協同新技術,利用多達250臺大型無人機與無人車等組成的蜂群系統架構,助力地面作戰部隊完成復雜城區環境下的多種作戰任務,從而實現自主集群系統城市作戰能力的突破性進展。 ?
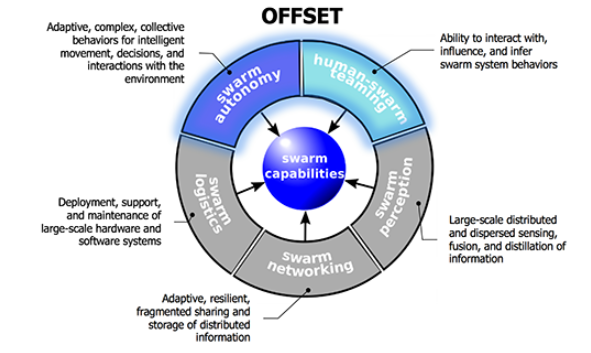
OFFSET項目蜂群沖刺的關鍵技術
? OFFSET項目計劃約每6個月舉行一次集群沖刺,并且每一次蜂群沖刺均以集群戰術、集群自主性、人-群協同、虛擬環境與物理實驗平臺五個關鍵技術中的一個或多個為突破點。 ?
第一次蜂群沖刺重點關注集群戰術集成,實現使用50架無人機蜂群定位一個目標;
第二次蜂群沖刺重點提升單體自主性;
第三次蜂群沖刺重點突破人-群協同與中級集群戰術;
第四次蜂群沖刺重點突破虛擬環境下的集成技術和人工智能技術在集群戰術中的應用;
第五次蜂群沖刺將重點突破城市環境中的集群實戰戰術和創新的集群化學平臺原型,以利用250架(輛)無人機與無人車集群在具有8個城市規模的街區自主執行6小時的任務。
美國國防部2020財年預算文件顯示,DARPA為OFFSET項目申請的預算達2000萬美金,并將用于:演示驗證可行的集群戰術行動方案的接口和執行;繼續整合先進的集群戰術,開展以能力為基礎的試驗;開始集群沖刺,重點改善虛擬環境和擴大物理實驗床,以實現任務目標,由此推斷該項目將進行多次技術突破型集群沖刺試驗。在此將集群沖刺試驗的新進展與新計劃梳理如下表所示。 ? 圖表:集群沖刺試驗新進展與新計劃
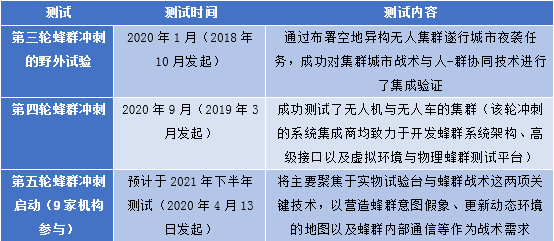
資料來源:調研整理
由上表可知,自第三輪蜂群沖刺測試起,DARPA更為注重集群實戰戰術、人-機群協同以及蜂群內部通信等方面的技術需求。據稱每一輪測試過后,基于DARPA提供的實時蜂群數據與場景分析,系統集成商都將提出新策略改善后續的測試運行,以及未來的技術開發,并致力于將新型蜂群技術整合到各自的體系結構中。由此可知,美國正從無人集群協同戰術等多方面進行技術攻關,通過人工智能、自主技術、虛擬現實及增強現實技術等提升無人機在城市作戰戰場上的綜合作戰能力。 ? 基于對拒止環境下協同作戰模式、可快速部署與回收集群作戰以進攻性蜂群城市作戰模式等相關研究的梳理可知,美軍現階段主要致力于通過CODE項目研發先進的自主化算法和監督控制技術,以增強無人機或尖端導彈在拒止環境的作戰能力;利用小精靈項目對小型低成本無人機的遠程投送與回收等空中分布式作戰模式相關技術進行集成驗證;OFFSET項目則將集成已有的自主集群與人-無人集群協同新技術,通過無人機/無人車等自主集群系統實現小型地面部隊城市作戰能力的突破。
? 無人機集群消耗作戰模式研究
? 在反介入/區域拒止環境中,敵方的綜合防空系統會增加空域的進入難度,而數量眾多的小型、低成本無人機能夠飽和敵方的雷達系統,降低有人機與高成本無人機的風險。因此,美軍在無人機集群消耗作戰模式方面開展了多項研究,在此僅以展開相關技術研究的低成本無人機蜂群作戰(LOCUST)項目與山鶉(Perdix)項目為例對美軍在該作戰模式方面的研究進展進行梳理。
? 圖表:LOCUST項目與Perdix項目所研究的無人機性能參數對比
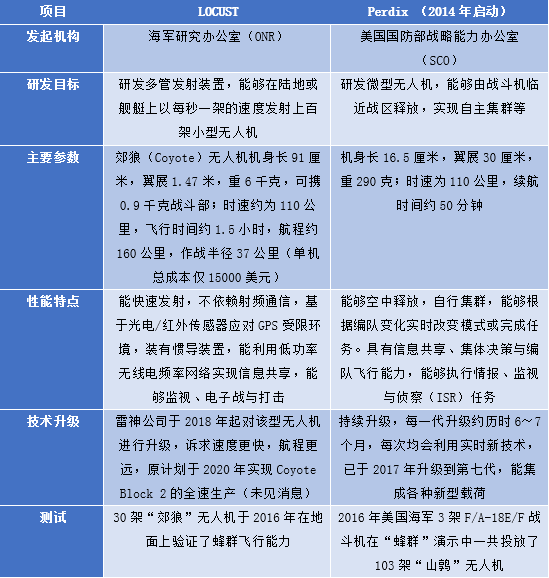
資料來源:調研整理 ? 其中: ?
郊狼無人機裝有雷神公司開發的軟件,從而能以最優作戰陣型飛行,也能擴大人類操作員的能力范疇,并且關鍵決策仍由人類操作員作出,還能依據需要對無人機群的任務進行校正;
Permix項目中,據稱SCO的目標是實現1000架Perdix無人機的批量生產,保證低成本的同時,盡快將該型無人機投入實戰,但該項目截至2020年12月未見更新研究進展,2018年開始負責Perdix項目的空軍助理部長Will Roper在2019年2月曾宣稱難于找到蜂群作戰的測試靶場,這可能是項目進展放緩的原因之一。
綜上可知,美軍發展低成本無人機集群作戰模式的主旨在于一方面以數量優勢壓制敵人,一方面執行空中監視與信息共享,甚至打擊任務。尤其Perdix項目所研發的微型無人機還能夠基體決策并具有編隊飛行能力。而蜂群作戰戰術與技術,以及人工智能算法與協同自主的結合是該作戰模式的關鍵技術難點。 ?
高智能化作戰研究 ? 智能化“敏捷禿鷲”系統
AFRL與錫拉丘茲研究公司早在2015年就合作開發了一款高性能嵌入式計算體系結構——“敏捷禿鷲”吊艙,該吊艙是聯合人工智能中心視頻處理人工智能原型的重要組成部分。該吊艙將采用人工智能技術,使機載高性能嵌入式計算與機器學習算法相結合,以探測、關聯、識別和跟蹤感興趣的目標,不僅降低了與其他平臺共享目標信息的通信帶寬要求,還能夠實時高效地進行數據處理與傳輸。 ? 此外,“敏捷禿鷹”吊艙可以集成各類傳感器或者算法,還能夠配裝至不同的有人機與Skyborg智能無人機等無人機平臺,進行編組處理數據和分享信息,目前該型吊艙之間的通信能力已經成功進行了地面驗證,但尚未進行空中試驗。 ?
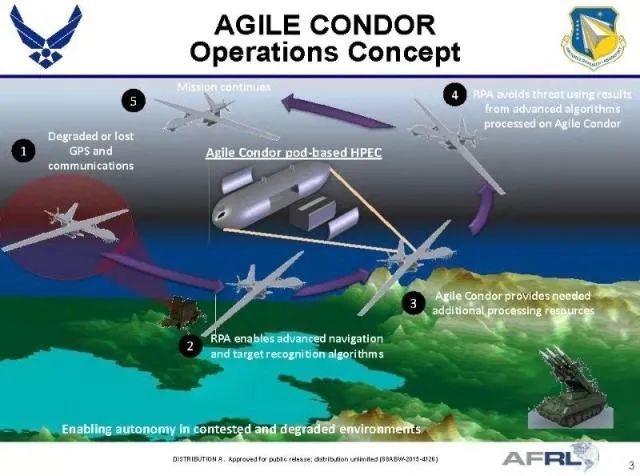
“敏捷禿鷲”行動概念
? 2019年9月,美軍空軍將“敏捷禿鷹”人工智能系統裝備在MQ-9無人戰斗機上,進行為期10個月的集成與演示驗證,以驗證該人工智能系統能否使MQ-9無人機進行廣域監視,能否無需人工干預,自主識別預先定義的感興趣目標并共享位置信息,自行決定是否執行致命打擊。據稱美國通用原子航空系統公司(GA-ASI)與SRC公司已經于2020年9月成功將“敏捷禿鷲”吊艙與MQ-9無人機集成并飛行,盡管未見測試詳情披露,但由“敏捷禿鷲”所具備的人工智能技術特點可以推斷,其與MQ-9的集成必將使該型無人機具備利用機載光電/紅外(EO/IR)傳感器與GA-ASI的Lynx合成孔徑雷達進行廣域目標自主識別的能力。 ? 未來“敏捷禿鷲”吊艙一旦投入實戰,無論被裝備在有人機,亦或是無人機平臺之上,勢必將提高戰機的自主性,更進一步提高戰機廣域下的自主目標檢測與快速決策能力;同時未來該型吊艙之間的空中通信能力一旦實現,對于提高有人-無人機協同作戰與蜂群作戰的信息交互能力將大有裨益。 ?
未來天基指揮通信系統
太空戰略空間是美國多年來的野心所向,美國SpaceX公司的“星鏈計劃”則大大利于美國實現其全球霸權的野心。因為該計劃將于2024年之前,在低軌道近地空間布置12000顆“星鏈”衛星(據稱該公司還計劃再投放3萬顆,使總數達到42000顆),其中約有2/3的衛星將被置于距地面550公里的低軌道上,將有四千顆衛星被置于距地面1200公里的軌道上,數量如此之大的衛星將形成覆蓋全球的空天網絡。 ?
美國SpaceX公司已經于2020年11月24日發射了60枚最新批次的Starlink衛星,至此該公司已經發射了955顆Starlink衛星,其中895顆在軌,建立了全球最大的衛星星群,并且SpaceX還計劃利用獵鷹9火箭發射系統每月將120顆星鏈衛星發送到軌道中。 ? 據稱美方為SpaceX投入大量資金,該公司的部分發射基地即在美國空軍基地,其衛星驗證也需與美國空軍合作,由此可知“星鏈”系統未來必將被美國軍方征用,成為其超級殺手锏,屆時將為美國軍方發揮重要作用。 ?
提供全天候軍事偵察,以及更為精確的制導;
基于“星鏈”系統的監測與變軌功能,系統中的衛星可被用于攻擊其他國家的衛星;
“星鏈”的萬顆低軌衛星將成為美軍無人機集群作戰的“天基大腦”,使其不受陸基通信系統的限制,通過“天基云計算”平臺即可進行飛行控制、態勢感知、信息共享、目標分配和智能決策。
由此可知,這一天基指揮通信系統未來一旦被美國軍方所用,必將大幅提升美國無人機的信息共享與智能決策等能力,從而推進無人機的智能化作戰實戰化進程。 ?
將開展高度自動化與自動目標識別研究
? DARPA還于2020年1月首次在空戰中對神經網絡的能力進行了試驗。美國喬治亞州理工學院與Aurora Flight Sciences、EpiSCI、Heron Systems、Lockheed Martin、Perspecta Labs、physicsAI、SoarTech 7家公司創建神經網絡算法,在虛擬F-15C鷹式戰斗機上與DARPA研制的“RED”人工智能系統進行了戰斗。而“RED”人工智能系統項目的研究目標則是開發能夠自動識別攻擊中使用的工具和過程并識別對手獨特弱點的算法與技術,以及可擴展的攻擊工具鏈數據庫,從而實現有針對性的智能響應。據稱該次測試取得成功,雖然未透露測試細節,但根據DARPA在該測試后針對用于無人戰斗機的人工智能系統開發提出了競標這一消息可以推斷,這次測試的結果很可能達到美軍預期,從而促使美軍進一步將無人戰機的高度自動化能力建設提上日程。 ? 此外,美國空軍裝備司令部還于2020年9月28日授予Leidos公司一份價值1294.7292萬美元的合同,以開發緊湊型自動目標識別技術和可持續環境支持技術,以提高對空中和地面目標作戰識別能力,預計該項目將于2025年10月30日完成。
小結
未來智能化作戰必將基于先進的隱身戰機、半自主無人戰機以及人工智能等產生,因此美國十分重視從無人機的自主智能、有人-無人機協同、人機交互能力以及集群協同技術等方面進行技術攻關,致力于通過人工智能提升無人機的智能自主化能力,通過采用開放系統架構,實現有人-無人機的實時數據共享、多機組網、協同配合與無縫連接等,以形成分布式空中作戰體系;通過“敏捷禿鷲”吊艙實現廣域目標識別與實時通信等,通過仿真實驗以及蜂群沖刺試驗等推進蜂群戰術與技術的創新、融合與集成,提升無人機的綜合作戰能力。盡管美國在該領域已經開展了大量的研究,并獲得了一定技術儲備,進一步推動了有人-無人機協同以及無人機蜂群作戰模式的實戰化進程,但無人機的自身性能、作戰中的實時通信、融入人工智能算法與自主能力的技術、遠程控制技術以及小型無人機的空中回收等仍然是無人機智能作戰模式下亟需攻克的技術難題,將高端作戰所需的人工智能與自主性結合尚需時日。 ? ? ?
編輯:黃飛
?









 工商網監
工商網監
評論