 電子發燒友App
電子發燒友App


雷達制導空空導彈 目前代表了最先進的技術所能做到的最好提供,無論是在范圍、精度和阻力方面 對策。
這反映在事實上,這些武器只是 被世界前線空軍使用,維護 復雜的火控系統需要超出 平均第三世界國家。與西方世界相比,甚至 直到七十年代中期,Warpac空軍很少使用這些武器 只有蘇聯在IA的防空飛機上使用多種類型 PVO-Strany。然而,情況正在發生變化,因為俄羅斯人正在 目前正在為戰術飛機配備雷達制導版本的 AA-7和AA-8以及低水平滲透將變得更加困難,因為 西方攔截飛機作為新的超級狐蝠,其 部署了具有俯視擊落功能的 25 nm AA-X-9,或者更確切地說是 AA-9。
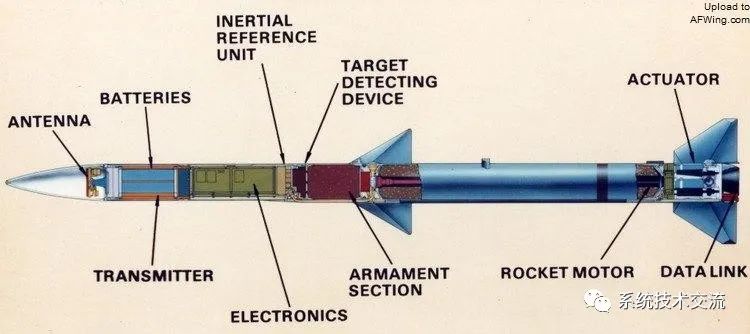
從好的方面來說,一場激烈的射擊結束了 在休斯和雷神之間為Amraam(高級中程) 空空導彈),休斯贏得了合同。阿姆拉姆是 取代西方空軍的雷達制導麻雀。這 武器 是一種發射后不管的慣性主動雷達制導導彈 中途制導,能夠針對追求目標的目標進行發射 發射機。
射程和速度優于麻雀,這總體上 功能被封裝到與紅外尺寸相當的機身中 響尾蛇,允許 F-14 和 F-15 攜帶其中八種武器, 而不是慣常的四種雷達制導武器。一些報告還 表明八十年代后期響尾蛇的替代品ASRAAM可能 還配備主動雷達制導,優先于紅外 其前身的指導。
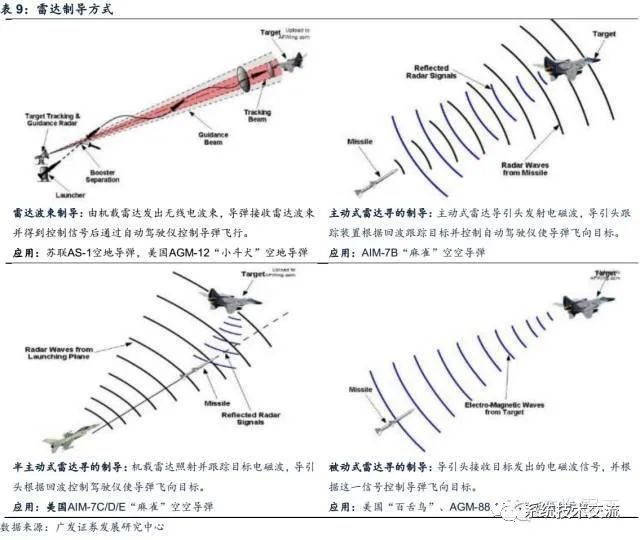
反射輻射源是雷達發射器;在 具有主動雷達制導的武器實例,該發射器是 位于導彈內;在半主動引導的情況下,它是 由發射機攜帶。無論哪種情況,變送器都必須 將電磁輻射束射向目標,這種輻射必須 行進到目標,反射,行回接收天線 導彈,被放大,解調和分析以確定 目標的方向,然后該信息啟用指導 計算機將武器轉向目標以實現擊殺。
一 有效的武器必須具有區分能力 目標的返回和來自其背景(即表面)的反射 地球或海洋,它也應該能夠抵抗干擾 或欺騙,能夠穿透惡劣天氣 條件。
雷達
雷達理論是一門極其復雜的學科,需要一門 對電磁學和波動理論的理解,幸運的是, 基本原則相當簡單。
每當我們感應時,就會產生電磁波 電場或磁場中的變化,通常是振蕩。然后這些波以光速向外傳播,3.108毫秒'。振蕩發生的速率決定了 波長,通過關系 λ = c/f ( λ = 波長, c = 光速, f = 頻率 振蕩)。
出于實際目的,如果我們打算創建方向 對于這些波,我們必須采用比 我們天線的尺寸(天線是輻射或 接收電磁波),當前雷達應用涉及 波長從一米到厘米不等,這些 對應于從 1 GHz(109 個周期/秒)到 60 左右的頻率 GHz(分類為微波頻段)。
術語雷達是一個首字母縮略詞 - 無線電探測和測距。一個 雷達由兩個基本子系統組成 - 發射器和 接收器。發射器是一種產生微波信號的設備, 該信號通常被調制(通常是脈沖開關),放大 并饋入發射天線。與低頻相比 電磁能,微波不能通過常規傳導 電纜,它們需要波導(波導是空心的[矩形或 圓形]部分,內壁涂有導電層 - 常用術語是管道),這些必須具有極低的損耗 因為發射器的功率輸出通常是 千瓦(或脈沖應用中的數十至數百千瓦)。
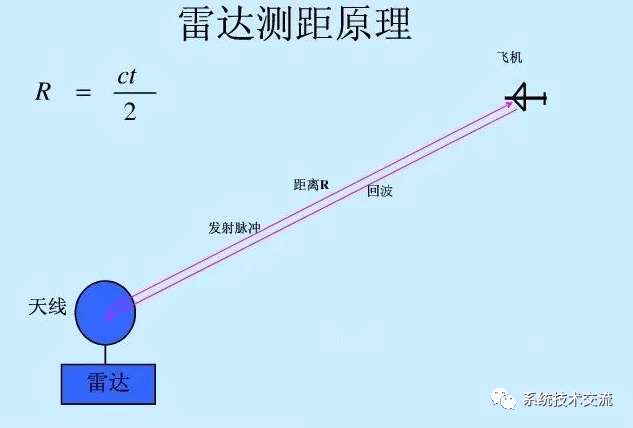
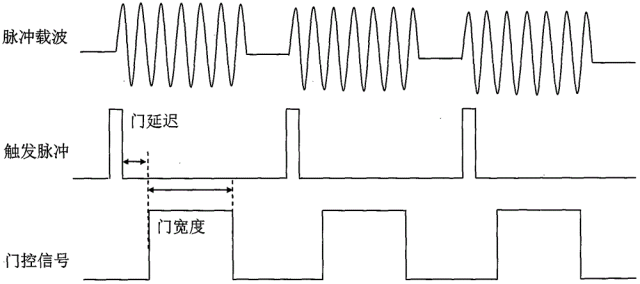
使用脈沖輸出的原因有很多,主要 因素是測距和峰值功率輸出。目標的范圍 可以通過測量脈沖所需的時間輕松確定 從發射器到目標并返回。在考慮 功率輸出,輸送的功率越多=范圍越大,并且 抗干擾能力,另一方面對抗干擾的要求越大 發射器的主輸出放大器(或振蕩器)。
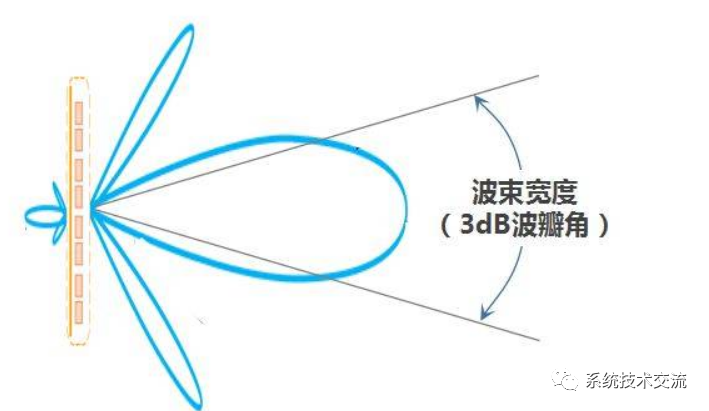
解決方案是脈沖輸出,時間 脈沖比脈沖的持續時間長得多(考慮 峰值輸出為 100 kW,脈沖長 10 毫秒,相距 100 毫秒 - 平均功率輸出僅為 10 kW)。然后將輸出功率饋入 天線,將其聚焦成波束。監視雷達通常 采用相當寬的光束,目的是檢測 另一方面,目標,跟蹤光束必須非常窄,因為它們 用于準確測量目標相對于 雷達。
天線可以是傳統的拋物面天線或較新的天線 系統,相控陣,無需電子掃描 指向天線。然后傳輸的微波能量傳播 穿過大氣層朝向目標。像所有形式的 電磁輻射,微波被大氣衰減 - 吸收和分散。散射主要是由于水 然而,大氣中的粒子作為波長 輻射比水滴的大小大得多, 微波不會經歷 IR 的災難性衰減(參見 IR 指南,1982 年 6月),盡管有效范圍會減小 隨著存在的水量增加。
吸收是一種量子物理效應(TE March 1982),在 微波波長的例子 這主要是由于共振 在 Oz 分子中,其吸收線在 30 到 0.5 之間 在較遠的距離上,這可能會導致相當大的損失 信號。覆蓋源和源之間距離的能量 然后,目標在目標的 表面。
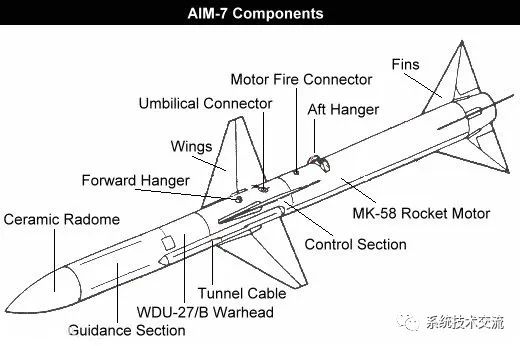
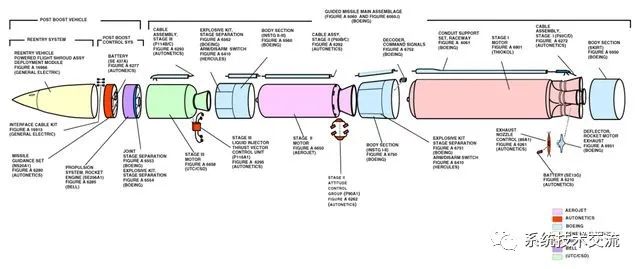
露出它的肚子,這個 F-14A 顯示它裝備的三類導彈 - 紅外熱 尋道雷達、半主動雷達和有源雷達。半主動AIM-7F 麻雀(右舷手套掛架)是AIM-7的后期型號 在越南戰爭期間(當時受到低可靠性的困擾),, 武器 最大射程約為100公里,巡航速度為4馬赫和 攜帶一個 40 公斤的連續桿彈頭。這枚導彈將裝備 澳大利亞皇家空軍的F-18A戰斗機,盡管后來將被較小的戰斗機取代 和更有能力的阿姆拉姆。機身下方的大型武器是 AIM-54A鳳凰,毫無疑問是世界上最致命的空對空 導彈,射程為 200 公里,彈頭重 60 公斤。當前的 A 版本將很快被更新的AIM-54C取代,配備 功能更強大的數字信號處理器,更輕、更便宜 機體。(戴夫·埃里克森,VF-51,小鷹號航空母艦)



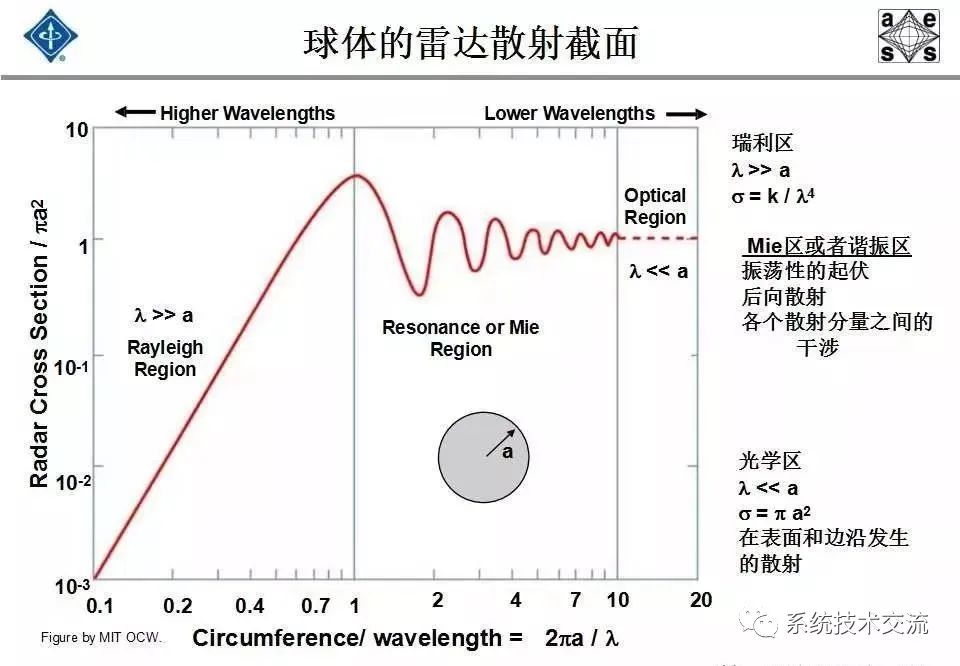
導電材料通常反射得非常好, 機身上鋒利的直邊通常表現得像天線,在 一般曲面的反射器比平面差 (考慮B-1的形狀,其雷達橫截面為1/10 的 B-52)。飛機反射能力的常用指標 微波是其雷達橫截面(每單位反射12.566功率) 入射目標的立體角/功率),隨方向變化 入射輻射。戰斗機,正面,有一個橫截面 在 0.1 到 1 m2 的 3 到 10 cm 帶之間,而轟炸機可以 接近 10 mz(不要試圖考慮 B-52 的橫截面!用途 的復合材料降低了特征,就像雷達吸收一樣 油漆幫助。
然后反射的微波能量傳播回 接收器,在許多情況下使用與 發射機。到達接收器的信號是 目標返回,來自背景的反射能量(雜波)和 電噪聲。根據接收器的類型,它可能會也可能不會 被放大,然后與 更高的頻率,這個過程被稱為超外差。
混合產生和和差頻率,差異 頻率在高頻(幾十到一百MHz)頻段, 然后這個頻率被放大(由于多種原因,它是 難以直接放大微波信號),隨后 解調。解調信號然后由電子設備處理 目標的產量信息,通常是相對范圍和速度 到雷達。
現代雷達采用復雜的技術來抑制雜波, 采用高速數字信號處理器,這些也可用于 規避干擾或欺騙。
半主動雷達制導 AAM
半主動雷達制導導彈主導世界雷達 導彈數量,基本上是憑借他們的親戚 單純。目前運行的絕大多數設計 起源于 1950 年代,除了一些蘇聯類型外,最近 部署(他們確實有一些追趕工作要做)。AIM-7麻雀是一種 開發 1950 年代的武器,就像 Skyflash 反過來是一種 AIM-7本身的開發。五十年代中期,當它是 決定開發空空導彈的雷達制導,它是 使用最先進的技術,不可能封裝雷達 發射器和接收器的適當范圍成中型 飛彈。是否有可能安裝所有系統,低得很低 真空管電子設備的可靠性將使 部署這種武器與其說是空中收益,不如說是障礙 部隊的作戰能力。
事實證明,兩種不同的制導系統是 嘗試過,橫梁騎行引導和半主動引導。前一類 通常被認為是滅絕的(在橫梁騎行系統中,導彈 沿著發射機火力傳輸的跟蹤光束行進 控制雷達)。武器的準確性僅由火力給出 控制的跟蹤精度,不需要很好,特別是 在遠距離。這,以及與動態相關的問題 武器飛行,導致整個班級的最終消亡(AIM-7A, AA-1堿)。目前,光束騎行(雖然激光)由 蘇格蘭皇家銀行-70 地對山導彈。后一類武器不僅存活了二十年, 事實上,它蓬勃發展,目前代表了主要的中程AAM 在大多數前線空軍中。
在半主動制導系統中,發射機 獲得 帶有火控雷達的目標,如果條件是 對,會跟蹤它。武器系統官員(通常為F-4)將 然后啟動導彈并鎖定發射機的照明器 到目標上。照明器通常是一個小的、獨立的窄 波束雷達發射器,可通過以下方式選擇性地指向目標 使用火控雷達生成的跟蹤信息。如果 然后導彈的制導成功鎖定目標的 雷達返回,然后導彈可能會發射。
由F-7,F-4,F-14,F-15攜帶的AIM-18被彈出 從它的支架上,當從發射機上清除時,發射它的固體 推進劑火箭發動機。然后它加速到巡航速度, 將自己指向目標。制導系統將生成一個 如果武器指向除中心以外的任何物體,則發出錯誤信號 目標的雷達橫截面。大多數武器采用比例 導航,由于指導的性質,這允許所有人 方面,通常是正面殺戮。
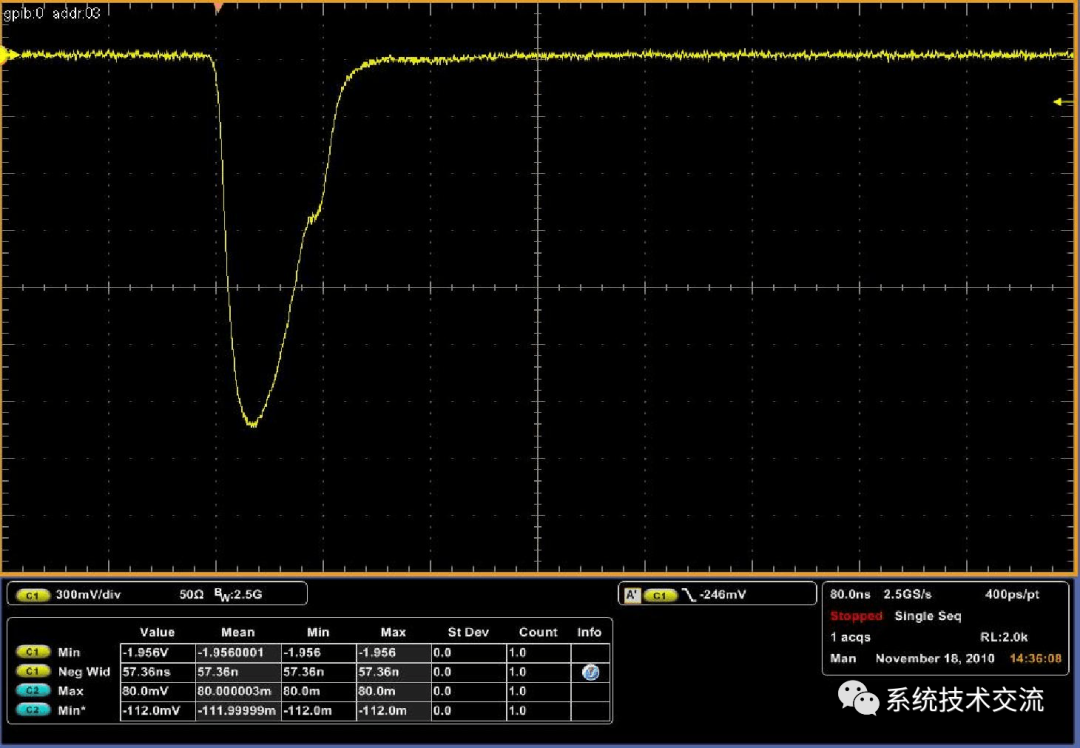
當目標在武器的致命半徑內時 彈頭,一種近炸引信,通常是雷達,引爆彈頭, 通常為高爆炸/破片型(引信的時機 危急的是,以色列F-4E未能正面擊殺敘利亞狐蝠, 備份AIM-7攻擊僅僅是因為導彈,融合目標 以跨音速行駛,在通過 3 馬赫米格后引爆, 未能造成任何傷害)并摧毀目標。大多數武器都有 錯過了米量級的距離,盡管天閃 顯然將其縮小到一米的數量級。最 決定半主動制導武器殺傷力的重要因素是 它的跟蹤精度和區分目標的能力 返回和地面雜亂。
早期的武器使用錐形掃描導引頭,但較新 系統寧愿使用單脈沖導引頭,因為它們更準確且 更好地抵抗干擾,盡管以增加復雜性為代價。
錐形掃描 半主動式 者
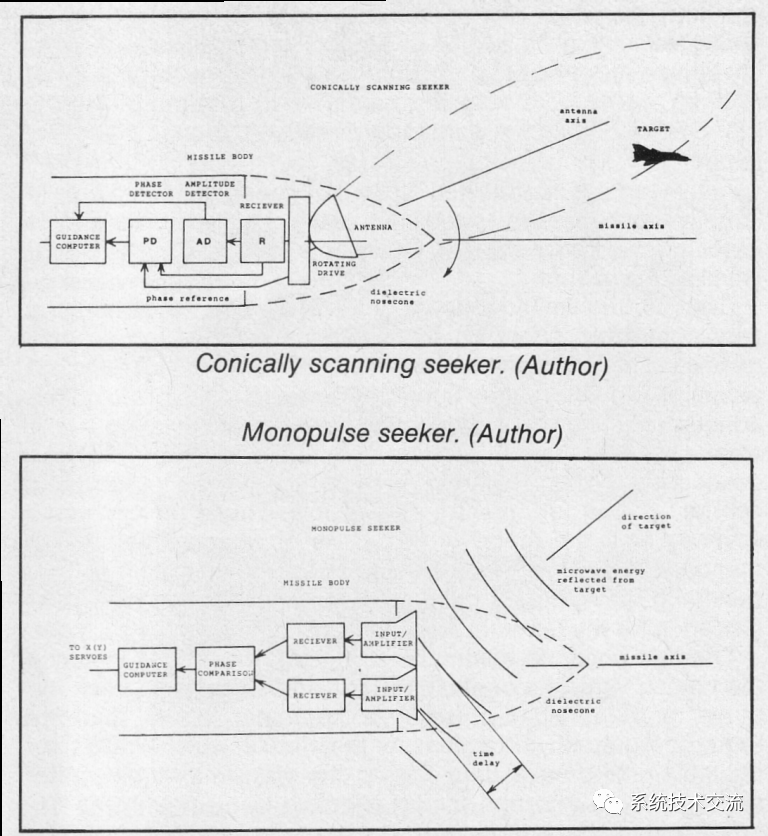
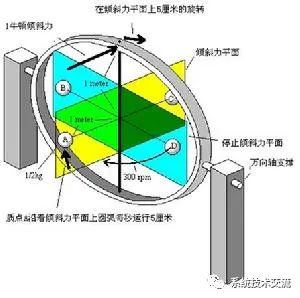
圓錐掃描導引頭很早就建立了自己的地位, 作為使用中的主要導引頭類型,這基本上是由于他們的 概念簡單和要求不高的信號處理電子設備, 使用真空管可輕松實現。主元素在 系統是一個旋轉天線。這個天線,通常是一個天線,旋轉 然而,關于導彈的軸線,天線的軸線( 其主瓣的軸 - 天線瓣是空間中的圖案 我們 如果我們用電磁場在天線周圍移動,會得到 強度計并用相等的場強度標記所有點) 偏移幾度,當天線旋轉時,其軸線繪制 圍繞導彈軸線的圓錐體。(見圖1)。
當發射機照亮目標時,它 就導引頭而言,表現為點源 電磁能。如果目標位于導引頭的錐內, 旋轉天線將調制輸出信號,離開 天線,因為目標離軸更近,信號越強 天線瓣。
這導致振幅的正弦變化 這 輸出信號。可以從相位中找到目標的方向 調制,相對于天線的方向 相對于導彈的軸線。振幅的變化包含 有關目標的其他角度分量的信息 方向。簡單的相位和幅度檢測器可以輕松提取 錯誤信號,然后可以將這些信號輸入導彈的制導 計算機,可以相應地確定正確的控制面 偏轉以最佳引導目標。

照明器傳輸的信號可以是脈沖或 連續波(CW),脈沖信號提供更高的峰值輸出,但 可能更容易卡住。在其基本配置中,一個圓錐形 掃描的系統可能很容易卡住,前提是我們知道速率 它旋轉。如果我們以與 照明器,但以非常接近的頻率對其進行幅度調制 導引頭天線旋轉的頻率,我們將成功 產生錯誤的錯誤信號,這將使導彈偏離航線。顯然,中途島號航空母艦的美國海軍F-4S在 與RAN的聯合演習,似乎AIM-7導引頭可以 不是消化由 RAN 上的旋轉道具反映的切碎回報 S-2s. 錐形掃描不太可能用于任何未來的設計, 因為它正在被單脈沖導引頭取代。
單脈沖半主動導引頭
單脈沖導引頭從以下位置獲取所有目標方位信息 一個 單脈沖,即連續波照明信號。這些尋求者 對系統電子設備的穩定性要求很高,并且 需要緊湊、高增益的接收器,所有這些因素都會使 真空管實現非常困難;另一方面,它們是 高度抗調幅干擾 - 由于這些 因素,直到 1970 年代,單脈沖系統才看到 運營部署,通常是英國航空航天Skyflash。
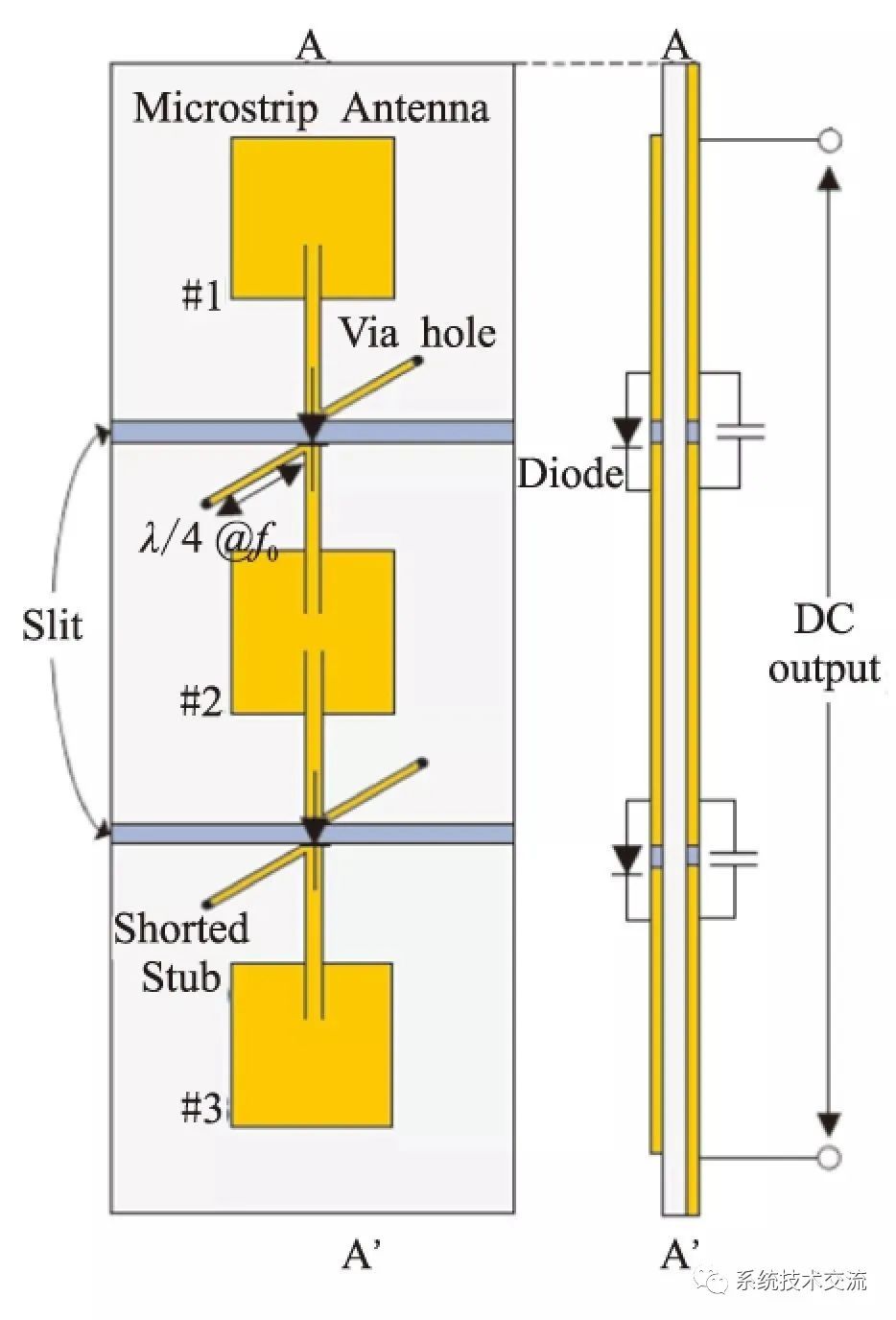
相位比較單脈沖系統(見圖2)利用 要生成的輸入信號之間的相位差(時間滯后) 引導錯誤信號。如果目標位于導彈軸線, 目標回路同時進入每個接收器。但是,如果 目標偏離軸,返回將進入側面的接收器 更接近它,即它將在回報上有一個階段領先 進入另一個接收器。
該相位差與 (對于小誤差) 成正比 目標和導彈軸之間的誤差角可能很容易 由電子設備檢測到。但另一方面,任何漂移 在處理過程中可能改變信號相位的接收器 將生成錯誤的錯誤信號。一個實用的系統將采用 四個接收器,每個軸兩個。這兩個接收器中的每一個都將 驅動相位檢測器,這將產生給定的錯誤信號。這些隨后將被輸入計算機,以找到所需的 控制偏轉。
單脈沖系統,如天閃導引頭,非常 準確且抗干擾。良好的雜波抑制允許捕捉 對低至 250 英尺的目標的攻擊,Skyflash 的測試試驗是 非常成功,有幾次直接撞擊擊殺。
主動雷達制導 AAM
主動雷達制導導彈是勞斯萊斯的 空對空導彈世界。可能是最極端的例子 他們有能力,是休斯AIM-54鳳凰。從 F-14,該武器被大型AWG-9雷達和火控瞄準 發射機的系統。導彈的巡航速度在 5馬赫區域(注:分類),覆蓋距離可達 100 nm 它將用 60 公斤彈頭摧毀其目標;一個注釋 興趣 - 在許多試驗中 AIM-54 摧毀了假彈頭 無人機受到直接影響。
到目前為止,主動雷達制導僅受到限制 自 大型武器,作為發射器及其復雜性的增加 相關系統使其無法適應中型或小型 大小的武器。
即便如此,有限的可用空間量還是有一個 對武器配置的影響非常明顯 - 只是相對的 使用小型變送器,其有限的功率輸出只能啟用 短程操作。如果可以輸出足夠的功率, 可能會出現另一個問題 - 直徑小 導彈將限制所用天線的尺寸,準確的信息 至于目標的方位將需要與天線一樣長的天線 可能。這些因素將嚴重限制這類 武器,但是存在許多消除此問題的方法 - 全部 提供中途制導,將主動雷達制導留給 武器飛行的最終尋的階段。
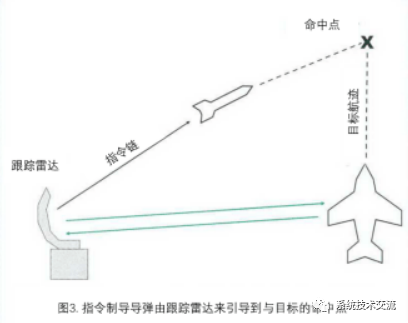
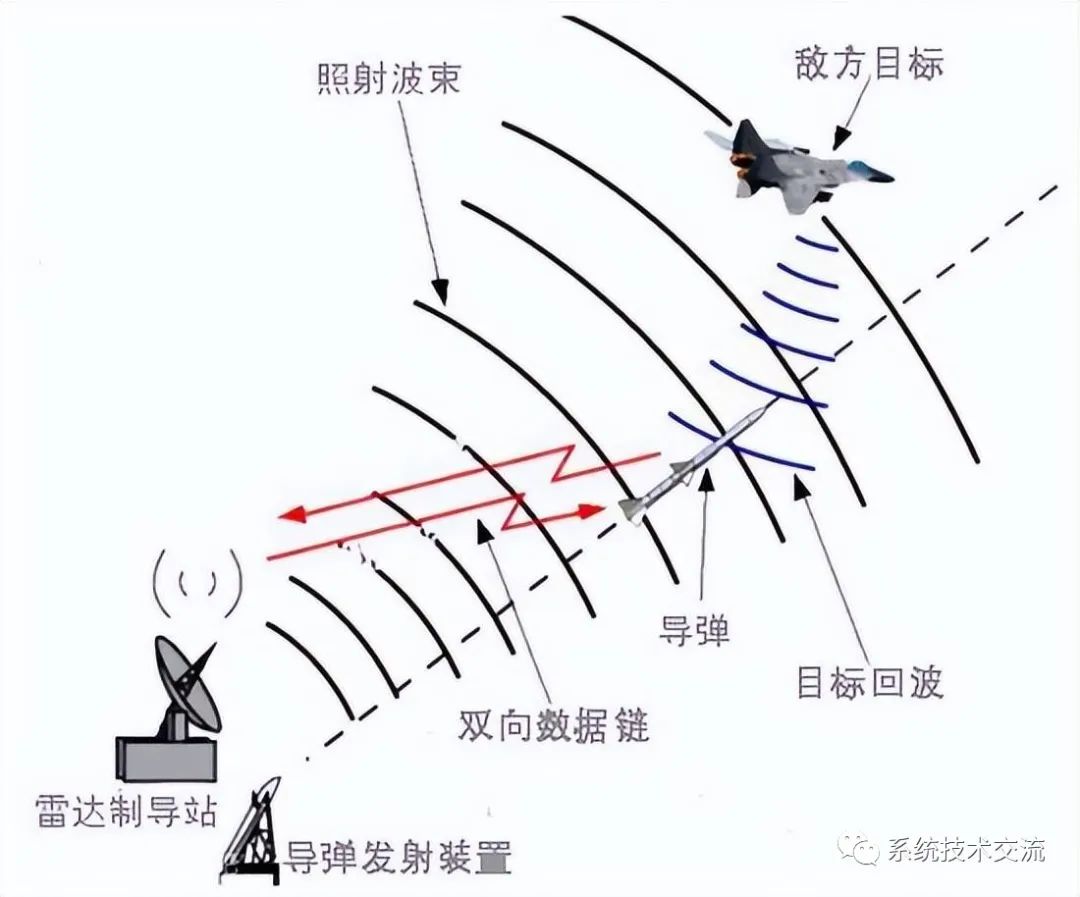
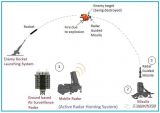
第一個選項是命令鏈接指南。在這種情況下 運載火箭或站點的雷達將準確跟蹤目標 并發射導彈,計算機將找到所需的飛行路徑 導彈的校正,然后通過數據傳輸 鏈接到導彈的飛行控制系統。當在 有效鎖定機載雷達,武器將啟動其 終端引導階段使用自己的雷達和計算機,不再 需要指導命令。這種類型的系統通常用于 地對空導彈系統。
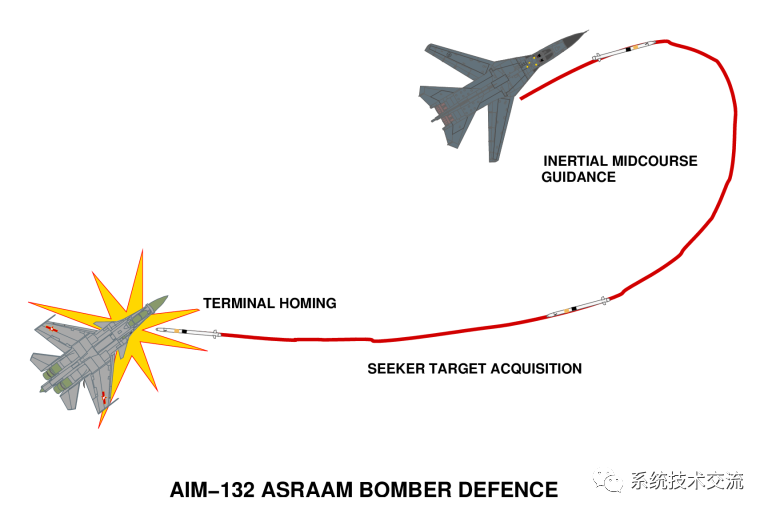
另一種可用的選擇是使用慣性中途 指導。該武器配備了雷達和慣性參考 系統(通常為3軸陀螺儀裝置-Amraam將使用 捷聯陀螺儀)。就在發射前,火控計算機將 向導彈的計算機提供目標的位置和 其飛行路徑的參數。利用慣性系統連續 跟蹤自己的位置,導彈將沿著飛行路徑,這將 將其置于目標的雷達范圍內。然后武器將切換 在自己的雷達上,定位目標,鎖定,回家并摧毀它。該系統有一個很大的優勢 - 目標不需要知道 接近導彈直到為時已晚,并輔以 與命令數據鏈路或 跟蹤/照明光束。提供的另一個優點是 在獨立目標上進行多次發射的可能性,例如。最多六個 Amraams可以幾乎同時向單個目標發射。

可以選擇的第三種選擇是使用半主動 雷達中途制導。與所有半主動雷達系統一樣, 火控使用微波束來照亮目標。這 導彈接收這種能量并利用它來引導射程內 自己的雷達,然后用于終端階段。半主動中段引導具有簡單性的優點,如 導彈只需要在被動模式下使用自己的雷達,沒有任何 數據鏈接收器或慣性參考系統。另一方面 但是,這種形式的指導本身就容易欺騙和干擾,如果 沒有采取適當的措施。
主動雷達制導可能會變得更加普遍 未來,隨著高功率微波固態器件的完善, 能夠構建緊湊可靠的變送器。更快 以及功能更強大的微處理器芯片(甚至更快的位片 處理器)將使武器本身具有更好的抵抗能力 干擾和區分目標和雜亂。強大的信號 處理器將允許指南本身接管許多 目前由發射機火控處理的功能,例如 作為解決編隊中的單個目標。導彈可以 在發射前以強制搜索模式運行,繞過 需要使用發射機的火控雷達 - 最終 武器 可以由不配備雷達的飛機攜帶,在同一個 時尚作為當前即發即棄的 IR AAM。隨著趨勢 更小更輕的戰斗機,這變得更加 有吸引力,戰斗機的雷達/火控越簡單,越大 可靠性,因此可用于戰斗。
雷達導彈制導提供射程和惡劣天氣 紅外或光學引導無法匹配的操作。一個可能 假設未來的設計,而不是使用單一形式的 制導,由于其嚴格限制的發射包絡,將使用 傳感器組合,可能會造成干擾和/或欺騙 在實際情況中,如果不是不可能的話,也很難。極致 目標可以看作是一個小的,緊湊的,所有方面,所有天氣,所有 高度,短程和遠程,發射后不管的武器,最有可能 在 1990 年代后期實現,如果高能激光沒有得到 首先在那里。
編輯:黃飛
?

















 工商網監
工商網監
評論