 電子發(fā)燒友App
電子發(fā)燒友App


基于CAN總線的數(shù)字式自動找平控制系統(tǒng)設(shè)計
隨著微型電子技術(shù)的發(fā)展以及成本的降低,數(shù)字式控制系統(tǒng)在現(xiàn)代工程機械中得到了越來越廣泛的應(yīng)用,基于CAN總線的控制系統(tǒng)在現(xiàn)代工程機械中正在逐漸普及。數(shù)字式自動找平控制系統(tǒng)可提高瀝青混凝土攤鋪機的性能,改善操縱性等,由于具有高可靠性和靈活性。因此對其研究具有重要的現(xiàn)實意義。實現(xiàn)數(shù)字式控制系統(tǒng)的方案很多,筆者所研制的控制系統(tǒng)是基于CAN總線,以C8051F040單片機為核心而設(shè)計的。
??? 2 CAN總線的特點
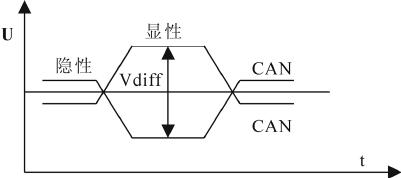
??? CAN(Controller Aera Networ)總線是德國BOSCH公司在80年代初為解決現(xiàn)代汽車中眾多的控制與測試儀器之間的數(shù)據(jù)交換而開發(fā)的一種串行數(shù)據(jù)通信協(xié)議。
??? CAN總線與其他總線相比有如下特點:
??? 1)CAN總線是多主總線結(jié)構(gòu),即每個節(jié)點機均可成為主機,且節(jié)點機之間也可相互通信。
??? 2)CAN總線通信接口集成了CAN協(xié)議的物理層和數(shù)據(jù)鏈路層功能,可完成對通信數(shù)據(jù)的成幀處理,包括位填充、數(shù)據(jù)塊編碼、循環(huán)冗余校驗、優(yōu)先級判別等。
??? 3)通信介質(zhì)可以是雙絞線、同軸電纜或光導(dǎo)纖維,通信速率最高可達1 Mb/s。
??? 4)CAN協(xié)議的一個最大特點是廢除了傳統(tǒng)的站地址編碼,取而代之是對通信數(shù)據(jù)塊進行編碼。數(shù)據(jù)塊的標識碼可由11或29位二進制數(shù)組成。因此可以定義11或29個不同的數(shù)據(jù)塊,這種數(shù)據(jù)塊編碼方式還可使不同的節(jié)點同時接收相同的數(shù)據(jù)。
??? 5)數(shù)據(jù)段最大長度為8位,可以滿足通常工業(yè)領(lǐng)域中控制命令、工作狀態(tài)及測試數(shù)據(jù)的一般要求。同時8位不會占用總線時間過長,從而保證了通信的實時性。
??? 6)CAN協(xié)議采用CRC檢驗并可提供相應(yīng)的錯誤處理功能,保證了數(shù)據(jù)通信的可靠性。
??? CAN總線具有通信速率高、結(jié)構(gòu)簡單、可靠性強的特點,因此。選用CAN總線作為控制器通信方式可以較好地滿足系統(tǒng)要求。
??? 3 攤鋪機自動找平控制系統(tǒng)設(shè)計
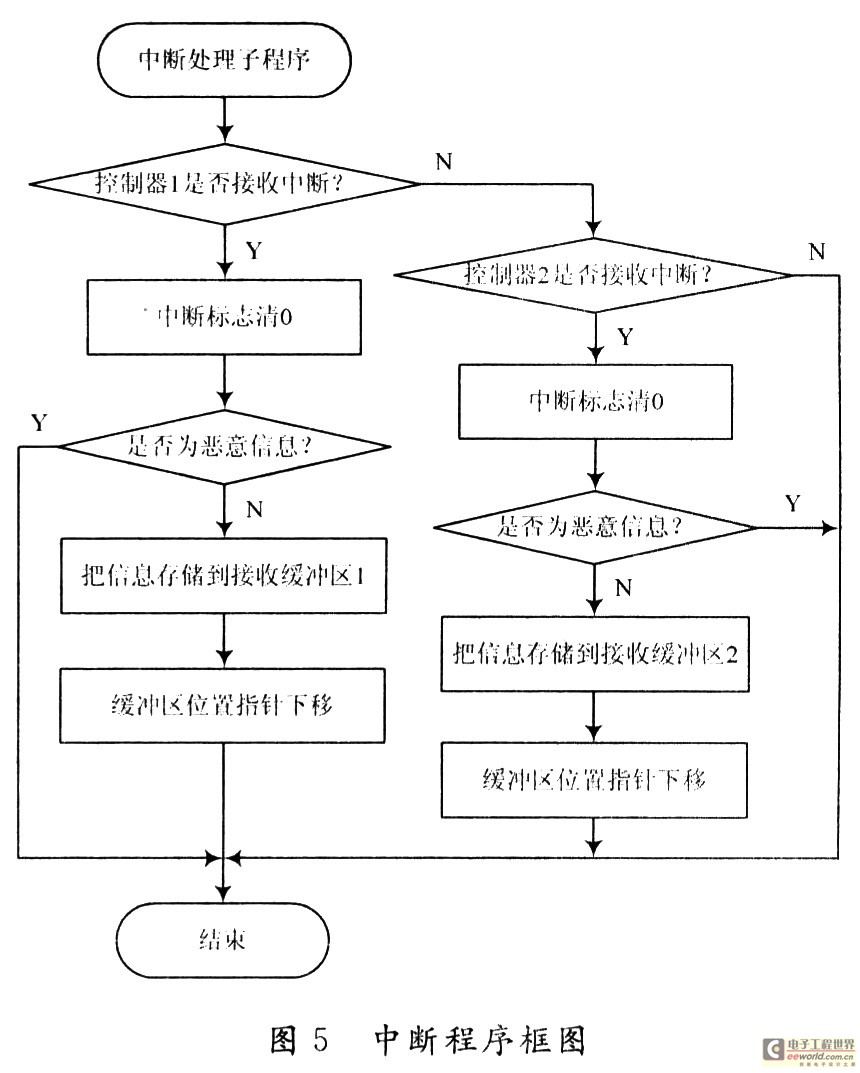
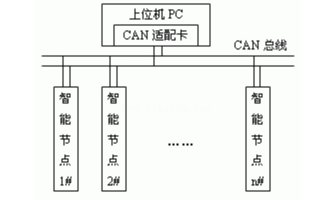
??? 自動找平控制系統(tǒng)是根據(jù)測量面距基準面(線)的距離,自動調(diào)節(jié)電磁閥實現(xiàn)自動找平。該控制系統(tǒng)是由控制器、橫坡傳感器、縱坡傳感器。顯示器單元及電纜組成。系統(tǒng)控制結(jié)構(gòu)如圖1所示。縱坡傳感器可選配接觸式、超聲波、超聲波平衡梁、激光等不同形式的傳感器件。縱向控制器、橫向控制器、顯示器和傳感器采用模塊化設(shè)計以滿足各自不同的控制要求。模塊之間通信采用CAN總線方式。模塊化設(shè)計有利于系統(tǒng)集中操作以及系統(tǒng)擴展。
??? 
??? 系統(tǒng)中控制器根據(jù)相應(yīng)的傳感器信號控制電磁閥動作;顯示器為可選單元,安裝在操作室內(nèi),顯示每個控制器的參數(shù)和信息,還可以通過按鈕控制相應(yīng)的控制器。
??? 3.1 控制器
??? 控制器為自動找平系統(tǒng)的核心部分。數(shù)據(jù)處理部分采用C8051F040單片機。C8051F040是由美國Cygnal公司生產(chǎn)的完全集成的混合信號系統(tǒng)級芯片SoC(System on Chip),具有與8051指令集完全兼容的CIP-51內(nèi)核。它集成了構(gòu)成單片機數(shù)據(jù)采樣或控制系統(tǒng)所需的所有模擬和數(shù)字外設(shè)及其他功能元件。C8051F040包括64 kB Flash、4352 B RAM、CAN控制器2.0、2個串行接口、5個16位定時器、12位A/D轉(zhuǎn)換器、8位A/D轉(zhuǎn)換器、12位D/A轉(zhuǎn)換器以及6個PCA模塊等.它內(nèi)部還帶有JTAG接口,使調(diào)試非常方便。通訊部分主要采用C8051F040內(nèi)部集成的CAN控制器,并留有其他主流通訊接口。基于CAN總線的設(shè)計可以隨意擴展任何新型傳感器,實現(xiàn)多種找平控制功能。
??? 3.1.1 顯示功能
??? LCD顯示:數(shù)字液晶顯示屏采用香港精電公司的DMF-50840點陣圖形液晶顯示模塊,其特點如下:分辨率320x240;亮度350流明;分區(qū)顯示系統(tǒng)狀態(tài)。包括左右縱坡顯示區(qū)及橫坡顯示區(qū);液晶接口使用CPU總線、CPLD、顯存進行擴展;采用組合顯示,可讀性強。顯示控制器向上、下輸出;顯示坡度值及方向、超高值及方向、靈敏度、控制器參數(shù)和故障信息等。
??? LED顯示:僅用于指示當前閥驅(qū)動方向。它指示方向與LCD的箭頭方向一致。當操作人員處于距控制器較遠的位置時。LED的作用就會非常明顯。
??? 功能指示燈:用于自動功能指示、方向指示、基準繩功能指示。
??? 3.1.2 菜單功能
??? 功能選擇和參數(shù)設(shè)置,包括:橫坡傳感器識別;顯示橫向所測的的坡度數(shù);傳感器選擇;選擇相應(yīng)的傳感器類型;外部控制設(shè)置;是否允許其他設(shè)備(如顯示器鍵盤等)的控制命令有效,利用該功能來確定是否允許這一命令參與控制器的操作。
??? 靈敏度設(shè)定:如果配置不同類型的傳感器,系統(tǒng)的靈敏度要重新設(shè)置。調(diào)節(jié)范圍為1(低靈敏度)至10(高靈敏度),這組數(shù)據(jù)實際上是針對受很多因素影響的“死區(qū)”、“比例區(qū)”兩個參數(shù)而設(shè)置的。縱向傳感器和坡度傳感器需要分別設(shè)置。如果需要更換傳感器,則靈敏度值會自動保存。如果系統(tǒng)在自動狀態(tài)下工作很不穩(wěn)定,則需要降低靈敏度。
??? 控制范圍設(shè)定:如果外部需要的控制偏差超過預(yù)先設(shè)定的控制范圍,系統(tǒng)將認為是故障信號,控制器將停止有關(guān)的驅(qū)動。僅對縱向傳感器有效。
??? 長度單位設(shè)定:預(yù)設(shè)顯示值的長度單位。長度單位可在“厘米”、“英寸”選擇。僅對縱向傳感器有效。
??? 位置系數(shù):位置系數(shù)=執(zhí)行部件的位置變化/傳感器產(chǎn)生的位置變化,實際下降高度=傳感器位置變化×位置系數(shù)。僅對縱向傳感器有效。
??? 自檢:檢測控制器狀態(tài)。
?
??? 3.1.3 操作模式選擇
??? 包括自動模式(可以改變設(shè)定值,控制器自動工作,執(zhí)行部件將被驅(qū)動)、半自動模式(可以改變設(shè)定值,控制器無輸出)、手動模式(控制器停止自動工作,不改變設(shè)定值)。
??? 控制器還具備以下功能:
??? 零點設(shè)置:設(shè)定標準值;自動識別傳感器的類型;故障診斷功能;檢測出由傳感器,電磁閥,連線或操作程序而出現(xiàn)的錯誤,并顯示出信息或以聲,光信號提示;系統(tǒng)上電時,控制器自檢;具有驅(qū)動電磁閥電路;校正功能;當顯示值與實際值不等時,需要進行參數(shù)校正;電源極性保護、電壓瞬變保護。
??? 3.2 橫坡傳感器
??? 采用SEIKA固態(tài)角度傳感器NB43210,具有模擬信號輸出,傾角靈敏度0.2°,全密封,用于檢測執(zhí)行部件的坡度值。CPU選用C8051F040,采用其內(nèi)置CAN總線接口,外部進行光電隔離。
??? 3.3 縱坡傳感器
??? 可選配接觸式、超聲波、超聲波平衡梁等不同形式的傳感器件。
??? 接觸式:旋轉(zhuǎn)電位計采用導(dǎo)電塑料電位器WDD35D系列,阻值1 kΩ~5 kΩ.獨立線性度0.2%。轉(zhuǎn)軸可以自零點位置向兩個方向轉(zhuǎn)動,利用其機械部件感應(yīng)參考面進行距離檢測。經(jīng)過C8051F040處理。通過CPU內(nèi)置CAN總線接口發(fā)送,外部進行光電隔離。要求基準繩和參考面固定可靠。
??? 非接觸式:超聲波傳感器常采用多探頭超聲波技術(shù)。如圖2所示。該傳感器通過多點探測可以精確檢測到面或線的細微變化,經(jīng)過微處理器處理,通過CAN接口發(fā)送給控制器。如果測量的是基準地面,對一個超聲波探頭其原理可用公式表示為:
??? L=1/2vt
??? 其中t為傳播時間,v為已知超聲波在介質(zhì)中的傳播速度。超聲波傳播速度受溫度、空氣介質(zhì)等環(huán)境因素的影響。這可以通過校準超聲波探頭檢測L1間的超聲波傳播時間t1來進行校正,即由L1=1/2vt1可得V=2L1/t1,于是有L=t/t1L1。超聲波傳感器為非接觸式測量,使用方便。
??? 
??? 4 結(jié)束語
??? 數(shù)字式控制系統(tǒng)的人機界面友好,操作簡單,通過顯示器可以清楚地了解具體的偏差值和方向;通過修改軟件可以實現(xiàn)不同的控制方法;可以實現(xiàn)系統(tǒng)的智能化。具有故障分析能力,并發(fā)出報警信號,將事故消滅在萌芽狀態(tài),減少經(jīng)濟損失;以微處理器為核心的數(shù)字式控制器可以方便地實現(xiàn)控制器間的通訊。采用CAN總線通信方式使整個系統(tǒng)的結(jié)構(gòu)更加緊湊,系統(tǒng)更加可靠,更具有實用性,易于系統(tǒng)及功能擴展。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論