 電子發燒友App
電子發燒友App


傳統的DVR在補償電壓暫降時,其所需能量由并聯于所補償電網的整流器提供,缺點是不能補償深度電壓暫降。因此有學者提出由儲能裝置來提供能量。常見的儲能裝置有:蓄電池、超級電容、超導儲能裝置以及飛輪儲能裝置。與其他幾種儲能方式相比,飛輪儲能具有高儲能量、長壽命、高效率、無污染等特性。因此在飛輪電池以及工業用UPS電源等領域得到廣泛應用。飛輪儲能是一高速旋轉的飛輪質體作為機械能量儲存的介質,利用電機和能量轉換控制系統來控制能量的輸入(儲存能)和輸出(釋放能)。目前,產品化的飛輪儲能單元最高指標通常為儲能量2~5 kWh,功率250 kW,若要求更高功率、更大儲能量則需采用飛輪儲能單元并聯運行來實現。文獻對多臺飛輪并聯運行的控制策略進行了研究,提出了一種以飛輪可釋放能量為比例分配各臺飛輪儲能裝置輸出功率的控制策略,此控制策略會導致各臺并聯飛輪的充放電次數不均勻。
針對以上不足,本文提出了一種基于飛輪儲能的新型動態電壓恢復器;詳細分析了該系統的工作原理和各部分的控制策略;針對飛輪并聯運行提出了一種新的放電控制策略;最后對系統進行了仿真驗證。
1 電路拓撲
基于飛輪儲能的DVR的拓撲結構如圖l所示,其主要由DVR變換器、濾波器、旁路開關、串聯變壓器、變換器A、電感L和飛輪儲能陣列(FESA)組成。

DVR變換器、濾波器、旁路開關和串聯變壓器一起組成串聯型電壓恢復器,變換器A和電感L構成PWM整流器,飛輪儲能陣列由多臺飛輪儲能單元(FESU)并聯組成,飛輪儲能單元由飛輪變換器、永磁無刷直流電機和飛輪3部分組成。電網電壓正常時,飛輪處于充電狀態:在電網電壓發生暫降時,DVR變換器經串聯變壓器向電網注入補償電壓,從而保證負載電壓是額定電壓。淺度電壓暫降時能量由電網提供;深度電壓暫降時能量由飛輪提供。
驅動電機采用三相永磁無刷直流電機,因其具有運行可靠、免維護、高效率以及調速性能好的特點,其主要參數如表l所示。

2 系統的控制策略
2.1飛輪充電控制
飛輪的充電控制采用雙環控制結構,外環是轉速環,內環是電流環。其中,速度調節器采用復合控制。在啟動階段,希望轉速快速上升,而對控制精度要求相對較低,采用恒轉矩限流啟動;在調速階段,采用恒功率充電模式,隨著轉速的升高,輸入電流反比減小,可以減小不平衡磁拉力對轉子穩定性的影響,恒功率充電以系統能承受的最大功率P*為加速度功率;當速度達到穩態時,希望有較高的穩態精度,采用PI控制。
2.2 飛輪放電控制
在飛輪放電過程中,電機運行于制動狀態,隨著轉速的降低,電壓也隨之降低。為了得到恒定的直流母線電壓,采用電機回饋制動的半橋調制方式。
各臺并聯飛輪屬于同一規格,電氣參數基本一致;前后兩次電壓暫降間隔足以讓所有飛輪轉速都上升到額定轉速,故功率和儲能量相等;為了減少系統損耗,每次放電時投入運行的飛輪個數應盡可能少。飛輪放電控制的關鍵點是如何計算放電的飛輪臺數以及每臺飛輪的輸出電流指令值。
各臺飛輪的充放電次數為:T1≥T2≥…,≥TN,則放電控制策略如下:
1)按照充放電次數由少到多依次給各臺飛輪排序,如充放電次數相同,則轉速高者序列號小。
2)根據式(1)確定進入放電狀態的飛輪臺數m。
![]()
式中,Pmaxi為i臺飛輪的最大輸出功率;P*是需要輸出的功率指令值。
3)當P*![]() ,FESUm的輸出電流指令值為
,FESUm的輸出電流指令值為![]() 。
。
隨著能量的釋放,飛輪轉速下降,故儲能量和輸出功率隨之減小,當原有投入放電的飛輪不能滿足負載需求時,投入放電的飛輪臺數以及各臺飛輪的輸出電流指令值需重新計算。
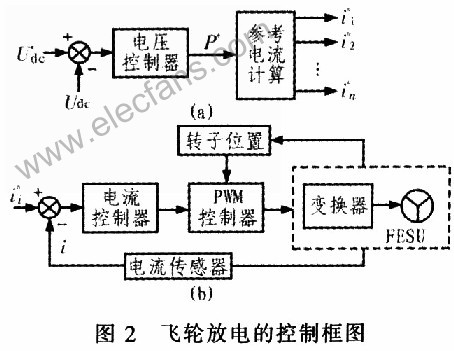
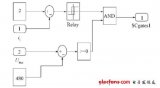
將之前進入放電狀態的飛輪的序列號都增加1,然后返回1)重新計算。當電網電壓恢復正常時,投入放電狀態的飛輪的充放電次數都增加1。由上述分析可得飛輪放電的控制框圖如圖2所示。
2.3 DVR變換器的控制
補償電壓的輸出需同時實現兩個目標:高動態響應速度和高穩定精度。前饋控制可以顯著提高系統的動態響應速度,縮短補償電壓發出的時間。反饋控制可以提高系統的穩定裕度。因此,采用由前饋控制、電壓瞬時值和濾波電容電流瞬時值反饋控制構成的復合控制策略。
2.4 變換器A的控制
變換器A的控制目的是控制直流母線電壓恒定的同時,實現交流側輸入電流的正弦化且與電網電壓同相位。
變換器在abe三相靜止坐標系下的方程為:
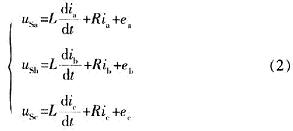
式中,L為與電網相連的濾波電感的電感值,將功率開關管損耗等效電阻同濾波電感等效電阻合并為R,usa、usb、usc為電網三相電壓,ia、ib、ic為變換器交流側三相電流,ea、eb、ec為變換器輸出的三相電壓。
通過坐標變換將該數學模型轉換至同步旋轉坐標系中,變換器在同步旋轉坐標系下的數學模型為:

式中,ud、uq為三相電網電壓在同步旋轉坐標系下的投影;id、iq為變換器交流側三相電流在同步旋轉坐標系下的投影。
選取同步旋轉坐標系的d軸與電網a相電壓矢量重合,則uq=O,式(3)可進一步簡化為:

這說明當電網電壓穩定時,控制了變換器d軸電流即控制了輸入的有功功率;控制了變換器q軸電流即控制了輸入的無功功率。若要實現單位功率因數控制,即輸入的無功功率為零,只要令變換器q軸電流設定值![]() 即可。
即可。
由式(4)可知,該數學模型存在交叉耦合項,因而給控制器設計造成一定難度。為此,采用前饋解耦控制策略,當電流調節器采用PI控制器時,則uid和uiq的控制方程如下:
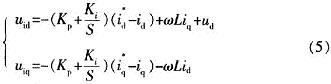
式中,Kp、Ki為電流內環比例系數和積分系數;![]() 為電流指令值。
為電流指令值。
將式(5)代人式(4),并化簡得:
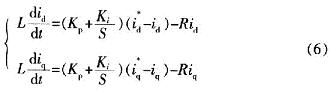
式(6)實現了電流內環的解耦控制。由上述分析可得變換器A的控制框圖如圖3所示。

3 仿真結果
針對提出的拓撲結構和控制策略,利用Matlab/Simulink進行仿真研究。系統主要參數如表2所示。其中,FESA由2臺FESU并聯組成。

3.1 飛輪充電狀態
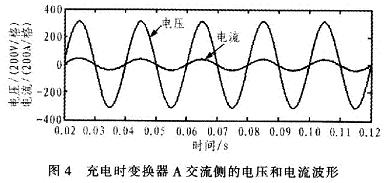
圖4是飛輪充電時變換器A交流側的電壓和電流波形,由圖4中可以看出電流與電壓同相,實現了電流對電壓功率因數控制。圖5是飛輪充電過程中,電機A相電流波形。相電流波形為方波,在換相過程中,相電流有一定的波動。
3.2 淺度電壓暫降補償狀態
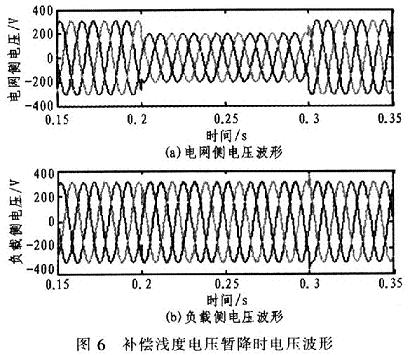
在淺度電壓暫降補償狀態時,能量由變換器A提供。圖6給出了電壓暫降時的動態補償波形,由圖6可以看出系統補償動態響應速度快,同時具有良好的穩定性和跟蹤性能。
3.3 深度電壓暫降補償狀態
在深度電壓暫降補償狀態時,能量由飛輪提供。圖7給出了動態補償波形。圖8和圖9是飛輪放電過程中,電機的相電流波形。在O.15~O.25 s之間,BLDCMl處于放電狀態;在O.25 s時負載突增,兩臺飛輪都進入放電狀態。


4 結論
為了克服傳統動態電壓恢復器和飛輪儲能單元的缺點,提出了一種基于飛輪儲能陣列的新型DVR,其可對深度電壓暫降進行補償;對飛輪儲能陣列運行于放電狀態的控制策略進行了研究,提出了一種新型的放電控制策略。利用Matlab/Simulink對所提出系統進行了仿真分析,仿真結果表明所提出拓撲結構及控制策略的正確性和有效性。


















 工商網監
工商網監
評論