 電子發(fā)燒友App
電子發(fā)燒友App


?
1 引言
PWM整流器不僅可以控制AC/DC 變換性能,而且可實(shí)現(xiàn)網(wǎng)側(cè)單位功率因數(shù)和正弦波電流控制,甚至能使電能雙向傳輸[1],因此被廣泛應(yīng)用于功率因數(shù)補(bǔ)償、高性能整流器、電能回饋、有源濾波等領(lǐng)域。整流器的輸入端來(lái)自電網(wǎng)的三相電源,其相序a,b,c 在保證相位差120°的前提下只是一個(gè)相對(duì)量,而整流器算法中三相電源的相序涉及大量的數(shù)學(xué)變換以及PWM 波的輸出,需在輸入端定義。這樣如果輸入端接線錯(cuò)誤,就不能實(shí)現(xiàn)算法功能。因此在不同的電網(wǎng)環(huán)境,必須先用儀器測(cè)量相序,再讓整流器工作,這樣的過(guò)程繁瑣且容易出錯(cuò)。在此提出一種新的三相電源相序調(diào)整方法,有效地解決了上述問(wèn)題。
2 PWM 整流器的數(shù)學(xué)模型及控制策略
2.1 PWM 整流器的基本結(jié)構(gòu)
圖1 示出三相VSR 主電路結(jié)構(gòu)。可見(jiàn),該電路由交流側(cè)三相電感、三相全控橋、直流側(cè)濾波電容組成。當(dāng)VSR 正常工作時(shí),通過(guò)PWM 波控制開關(guān)管的關(guān)斷順序,實(shí)現(xiàn)能量的雙向傳輸。
圖1 三相橋式電壓型PWM 整流器
橋臂上下兩個(gè)功率開關(guān)管的導(dǎo)通是互補(bǔ)的,即上橋臂開關(guān)管導(dǎo)通時(shí),對(duì)應(yīng)的下橋臂功率開關(guān)管關(guān)斷,其相應(yīng)的邏輯開關(guān)函數(shù)為:

?
2.2 數(shù)學(xué)模型及控制策略
設(shè)定電網(wǎng)電壓為:

?
式中:uao,ubo,uco分別為交流側(cè)a,b,c 與電源中點(diǎn)o 間的電壓;Up為峰值電壓。
由式(1)可得出三相靜止坐標(biāo)系下的開關(guān)函數(shù)數(shù)學(xué)模型為:

?
式中:ia,ib,ic為交流側(cè)電流;Udc為直流側(cè)的負(fù)載電壓。
為判別相序,將三相電壓轉(zhuǎn)換成線電壓。根據(jù)Clarke 變換,將a,b,c 坐標(biāo)系轉(zhuǎn)換為α,β 坐標(biāo)系:
?
式中:uab,ucb分別為線電壓,且以b 相為參考點(diǎn);uα,uβ,iα,iβ分別為α,β 坐標(biāo)系中的電壓和電流。
根據(jù)Park 變換,將α,β 坐標(biāo)系轉(zhuǎn)換為兩相旋轉(zhuǎn)d,q 坐標(biāo)系:

?
式中:ud,uq,id,iq分別為d,q 坐標(biāo)系中的電壓和電流;θ=2πft,f 為電網(wǎng)頻率,0≤t≤Tuα,Tuα為uα的周期。
經(jīng)過(guò)以上變換后,在d,q 坐標(biāo)系中的三相電壓型PWM 整流器的數(shù)學(xué)模型為:
?
令交流側(cè)電壓矢量在d,q 軸上的分量分別為upd=UdcSq,upq=UdcSd.在式(6)中,d,q 軸變量互相耦合,因而不能對(duì)其電流進(jìn)行單獨(dú)控制。通過(guò)id,iq的前饋解耦控制,對(duì)ud,uq進(jìn)行前饋補(bǔ)償,并且采用電流預(yù)測(cè)法對(duì)電流環(huán)進(jìn)行控制,方程如下:
?
式中:id* 為電壓環(huán)PI 的輸出值;iq*=0.
將第k+1 次采樣周期時(shí)輸入電流的采樣值,用給定值id*(k+1),iq*(k+1)來(lái)代替,計(jì)算出符合電流變化的輸出電壓矢量。在PWM 中運(yùn)用空間矢量法合成輸出電壓矢量,使下一次采樣時(shí)刻的實(shí)際電流以最佳特性跟隨下一時(shí)刻的參考電流。
控制系統(tǒng)的電壓外環(huán)采用PI 調(diào)節(jié)器,其輸出得到三相參考電流幅值基準(zhǔn)i*,i* 就是d,q 旋轉(zhuǎn)坐標(biāo)系下的電流給定值id*(k+1),iq*(k+1)。只要在開關(guān)周期內(nèi)實(shí)現(xiàn)式(7),即可實(shí)現(xiàn)電流無(wú)差拍控制。
3 相序調(diào)整原理
設(shè)a,b,c 為電網(wǎng)的三相端,a′,b′,c′為整流器三相輸入端,其連接方式有:①a′-a,b′-b,c′-c;②a′-b,b′-c,c′-a;③a′-c,b′-a,c′-b;④a′-c,b′-b,c′-a;⑤a′-b,b′-a,c′-c;⑥a′-a,b′-c,c′-b.連接法①是相位直接匹配,在連接法②,③中,電網(wǎng)和整流器相位依次交錯(cuò)但相序一致,用這3 種連接方法能產(chǎn)生正確的驅(qū)動(dòng)波形,線電壓分別為:
?
連接法④~⑥中,僅兩相交錯(cuò)連接,相序改變,從而影響驅(qū)動(dòng)波形的輸出,線電壓分別為:

?
式(11)和(8)、式(12)和(9)、式(13)和(10)中線電壓互換,又因?yàn)槭?8)~(10)的輸出線電壓一致,可推出式(11)~(13)的輸出線電壓一致,所以整流器的線電壓u ab′ ,u cb′ 在6 種進(jìn)線方式下分別有兩種波形且相位差60°,區(qū)分這兩種波形即可區(qū)分接線正確與否。y1=sin(2πt/T+φ),y2=sin(2πt/T+φ+π/3),其中T 為周期,φ 為初相角,y1和y2分別是關(guān)于時(shí)間t 的函數(shù),且y2比y1超前60°。當(dāng)t=(T/2π)(2kT-φ-π/3),k=0,1,2…,即y2處于過(guò)零點(diǎn)且上升沿位置,此時(shí)y1=-√3 /2<0;當(dāng)t=(T/2π)(2kT-φ),即y1處于過(guò)零點(diǎn)且上升沿位置,此時(shí)y2=√3 /2>0.同理,當(dāng)uab′處于過(guò)零點(diǎn)且上升沿位置,通過(guò)判斷ucb′是否大于零就可判斷出輸入端接線是否正確。當(dāng)判斷接線錯(cuò)誤時(shí),互換uab,ucb可將線電壓調(diào)整正確,α,β 坐標(biāo)系下的電壓為:

?
互換線電壓會(huì)導(dǎo)致扇區(qū)號(hào)呈順序排列,使電壓空間合成矢量的旋轉(zhuǎn)方向也由逆序變成順序。
為保證電壓空間合成矢量按照逆序旋轉(zhuǎn),可從開關(guān)器件切換點(diǎn)的時(shí)間T1,T2,T3入手,表1,2 分別為逆序旋轉(zhuǎn)和順序旋轉(zhuǎn)。
表1 扇區(qū)切換點(diǎn)時(shí)間(逆序)
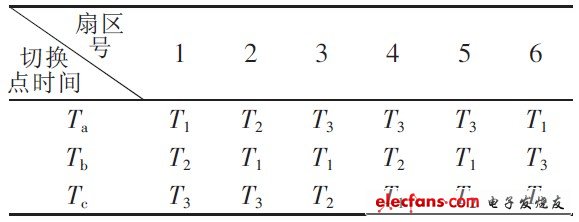
?
表2 扇區(qū)切換點(diǎn)時(shí)間(順序)
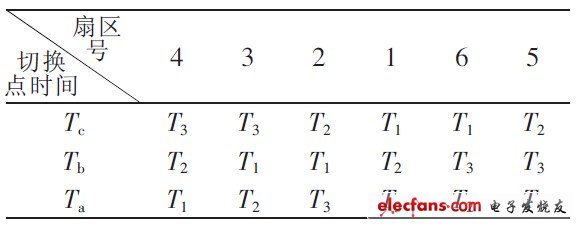
?
由此可知在互換線電壓的基礎(chǔ)上還要通過(guò)互換切換點(diǎn)時(shí)間Ta,Tc,才能使電壓空間合成矢量的旋轉(zhuǎn)方向按照逆序旋轉(zhuǎn)。在此線電壓是以b 相電壓為參考電壓,uab,ucb的互換其實(shí)也是ua,uc的互換,輸入電壓與電流相位跟隨,所以當(dāng)判斷接線錯(cuò)誤時(shí),ia,ic也要互換,α,β 坐標(biāo)系下的電流iα,iβ為:

?
4 仿真結(jié)果
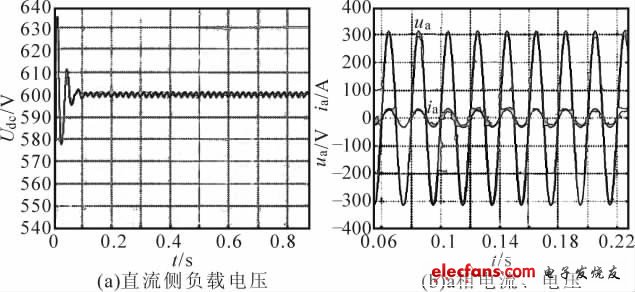
仿真參數(shù):網(wǎng)側(cè)電感為5 mH,直流側(cè)電容為1 100 μF,開關(guān)頻率10 kHz,輸出功率15 kW.改變整流器輸入端的接線,均可得到圖2 所示的效果。
?
圖2 仿真波形
5 實(shí)驗(yàn)結(jié)果
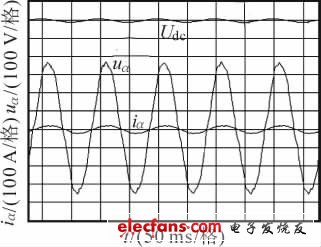
實(shí)驗(yàn)參數(shù)與仿真參數(shù)一致。由于輸入端是線電壓,直接觀察三相坐標(biāo)系中電壓電流的動(dòng)態(tài)變化不方便,所以圖3 中顯示的是兩相靜止坐標(biāo)系中的電壓電流及輸出的直流側(cè)負(fù)載電壓。
按照連接法④~⑥進(jìn)行實(shí)驗(yàn),結(jié)果均與圖3 一致,說(shuō)明輸入電壓與電流跟隨且輸出直流電壓穩(wěn)定;在15 kW 帶載條件下測(cè)得的失真度為6.03%.
?
圖3 實(shí)驗(yàn)波形
6 結(jié)論
針對(duì)PWM 整流器輸入端的相序進(jìn)行了研究,提出了一種可自動(dòng)調(diào)整相序的方法。通過(guò)互換線電壓、AC 相電流與改變扇區(qū)號(hào)在空間中的排列方向,使整流器在和電網(wǎng)相序不一致的情況下也能正常工作。該方法用在功率為15 kW 中頻逆變電源的整流器中,運(yùn)行良好、穩(wěn)定。










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論