 電子發燒友App
電子發燒友App


今天的技術需要復雜的電源電路,甚至在構建之前就需要進行模擬。這些組件昂貴且測試耗時。在PSIM電子模擬器是用于測試的電池和車輛用充電裝置以及項目用于再充電,并使用太陽能的測試和仿真環境。
介紹
PSIM是Powersim公司開發的一款電子電路仿真軟件。它專為電力電子和電機驅動仿真而設計,但也可用于仿真任何類型的電子電路。它有幾個外部模塊,可擴展其在特定仿真和電路設計領域的功能,例如設備控制、電動機、光伏和風力渦輪機。它被工業界廣泛用于研究和產品開發,通常被學校用于研究和教學。PSIM 特別適用于需要較長處理時間的模擬。最新的軟件版本提供了使用 LTspice 引擎的可能性。SPICE 模型庫非常廣泛,還包括工業設備。通過使用 SPICE 模型,
柵極驅動的特點
過渡緊張局勢的演變
開關和傳導損耗
寄生相互作用
在單個集成環境中,用戶可以無縫、輕松地從 PSIM 仿真切換到 SPICE 仿真。由此產生的好處很多,PSIM 和 SPICE 的組合為您的所有設計需求提供了理想的環境。可以在 PSIM 中從概念的角度檢查電路,然后使用 SPICE 對其進行更深入的開發和研究。SPICE 模塊是 PSIM 的附加選項。如前所述,它允許以非常簡單的方式與 LTspice 進行連接和交互。您只需要在 PSIM 環境中創建電路圖,然后按一個按鈕即可運行 LTspice 仿真。通過這種方式,可以模擬其他制造商的組件。如圖1所示,PSIM仿真環境包括:
PSIM原理圖程序
兩個仿真引擎(PSIM 和 SPICE)
SIMVIEW波形處理程序、波形顯示和后處理模塊
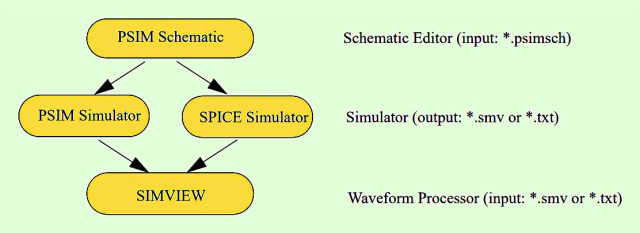
圖 1:PSIM 的基本組成部分
內置 C 編譯器的存在允許您插入和測試您自己的自定義 C 代碼。大量在線資源可讓您根據需要獲得幫助和建議。除了基本包,PSIM 還可以包括以下附加模塊:
數字控制模塊
HEV設計套件
磁耦合模塊
MagCoupler-RT 模塊
ModCoupler5 模塊
電機控制設計套件
電機驅動模塊
SimCoupler 模塊
可再生能源模塊
SimCoder3 模塊
F2833x 目標
F2803x 目標
F2802x 目標
F2806x 目標
F2837x 目標
PE-Expert4 目標
PIL模塊
散熱模塊
PSIM 使用梯形積分的數值節點分析算法。需要強調的是,PSIM 同時求解所有方程并且不會像其他模擬器那樣生成系統級矩陣。當有很多導數時,后者會導致收斂問題。另一方面,PSIM 基于 EMTP 技術,該技術用于解決電磁瞬變的計算方法,由 H. Dommel 博士開發。
如何使用太陽能模塊
該模型更精確地模擬太陽的行為,因為它同時作用于光強度和溫度變化。計算中涉及的參數很多:
細胞數
標準光強
參考溫度
每個太陽能電池的串聯電阻
每個太陽能電池的分流電阻
每個太陽能電池在參考溫度下的短路電流
參考溫度下各太陽能電池二極管的飽和電流
每個太陽能電池的能帶能量
理想因子,也稱為排放系數
定義光強度如何影響太陽能電池溫度的Ks系數
為了清楚地了解 PSIM 是什么,我們可以在太陽能模塊上對其進行測試。該模塊的物理模型包括光強度和環境溫度的變化。但是,它需要很多輸入參數。一些參數可以從制造商的技術文檔中獲得,但其他參數必須通過反復試驗獲得。因此,首先要進行的操作是在制造商的技術表中輸入信息,如圖 2所示。
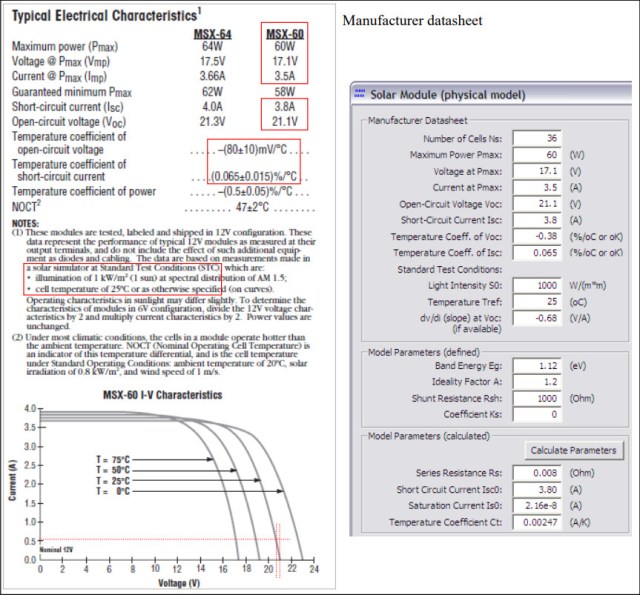
圖2:太陽能裝置的數據必須在程序中上報。
然后估計參數Eg、A、Rsh和Ks的值。它們通常不會在技術表中報告。他們描述:
例如:帶能量
A : 理想因子
Rsh : 分流電阻
Ks : 系數
對于晶體硅,Eg帶能量的良好初始估計可能為 1.12 eV,對于非晶硅約為 2 eV。理想因子的良好初始值對于晶體硅約為 2,對于非晶硅小于 2。分流電阻的推薦值為幾千歐。最后,如果未知,可以將Ks系數的初始值設置為 0。在示例中,我們可以設置以下參數:
例如= 1.12
A = 1.2
Rsh = 1,000
KS = 0
根據此信息,程序通過單擊“計算參數”按鈕計算其他參數。您將獲得以下值:
盧比= 0.0108
Isc0 = 3.8
Is0 = 2.16E-8
Ct = 0.00247
請注意,所有計算都是近似值,僅提供基本值。用戶可以根據自己的需要調整它們以適應IV曲線。然后可以微調這些參數,提供光強度S和環境溫度Ta以獲得 IV 和 PV 曲線。最大功率點也將在這里計算。如果我們定義S = 1,000 W/m 2且Ta = 25°C,則最大功率點等于:
Pmax = 59.27 瓦
Vmax = 16.73 V
Imax = 3.54 A
最大功率和電壓均低于數據表中的 60 W 和 17.1 V。需要調整參數Eg、A、Rsh、Ks、Rs、Is0和Ct以獲得更好的擬合。在本例中,如果我們將串聯電阻 Rs 更改為 0.008 Ω,則計算出的數據將等于:
Pmax = 60.54 瓦
Vmax = 17.04 V
Imax = 3.55 A
更接近數據表的值。最終曲線如圖 3所示。
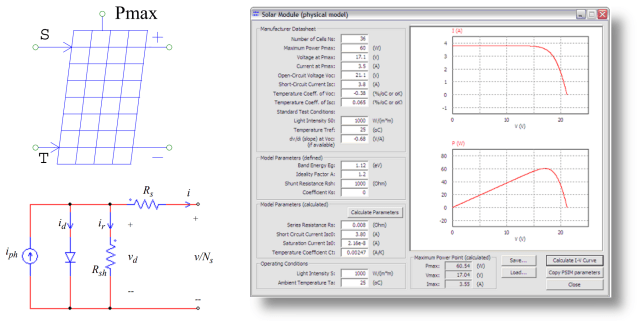
圖 3:太陽能組件計算
彼此相同的不同太陽能模塊通常串聯連接以形成太陽能電池陣列。太陽能模塊塊可用于模擬太陽能電池陣列。圖 4顯示了兩個串聯的 Solarex MSX-60 太陽能模塊及其組合塊。組合塊模型的參數與單個太陽能組件相同,只是電池片數Ns為2。當多個組件串聯時,如果光強和環境溫度不同,每個組件都需要一個旁路二極管輸入不同。此外,每個模塊上都需要一個 30nF 的小電容器以提高數值收斂性。
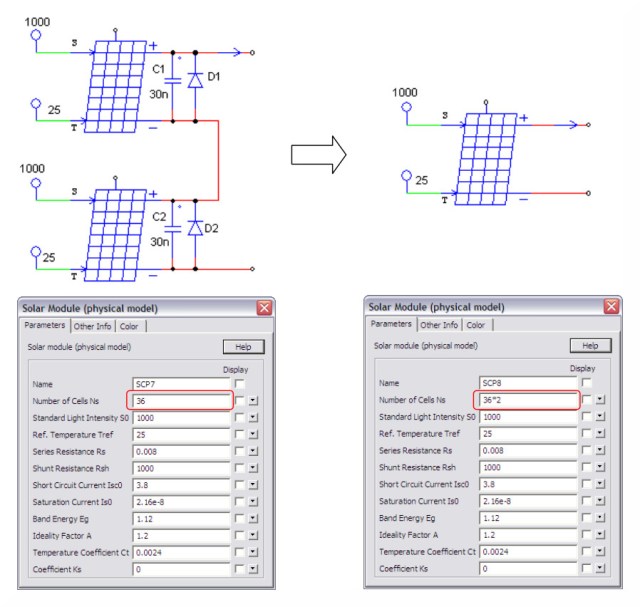
圖 4:串聯的兩個太陽能模塊
設計電源極其簡單
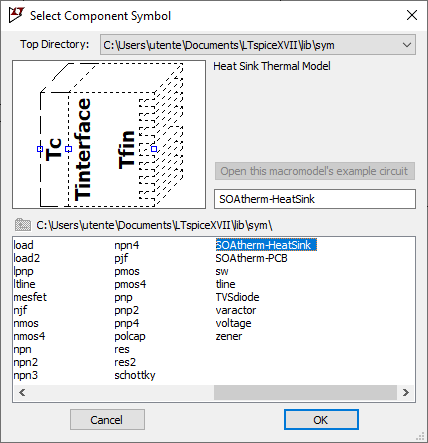
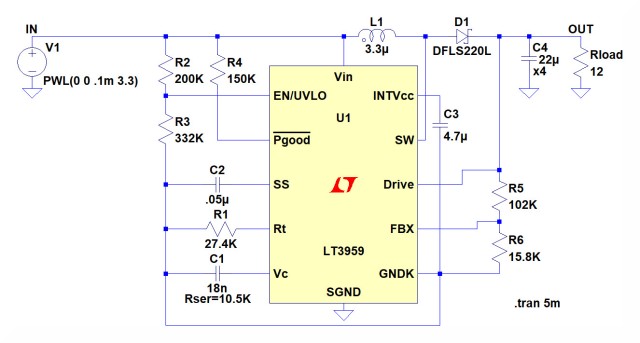
PSIM 允許用戶輕松地在理想器件到詳細開關模型、真實熱器件和 SPICE 模型之間切換。這使您可以選擇適合您的仿真需求的合適模型(參見圖 5)。在模擬方面,它是市場上最快的之一,即使對于極其復雜的項目也是如此。這意味著設備設計和測試及其實際實施之間的時間最短。電源轉換器和控制系統的仿真,即使是非常大和復雜的系統,也可以在短時間內完成,因為該軟件是為這些活動而專門開發的。
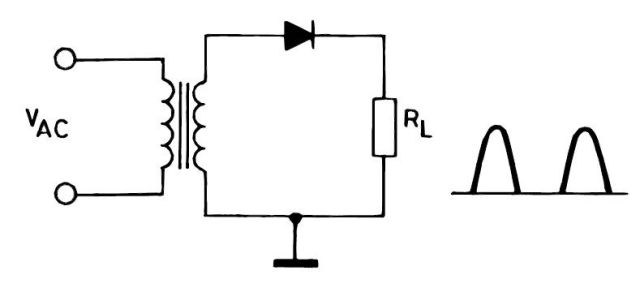
電源轉換器的任務是通過提供適合用戶負載的電壓和電流來控制電能的流動。最初,能量轉換是通過機電轉換器獲得的。今天,由于高性能半導體的存在,轉換是通過電路進行的,無需機械元件的干預。由此產生的優勢數不勝數:重量和體積大大降低,靜態和動態性能顯著提高。靜態變流器由一組電氣元件組成,充當兩個電源之間的適應和轉換階段,通常在發電機和負載之間。
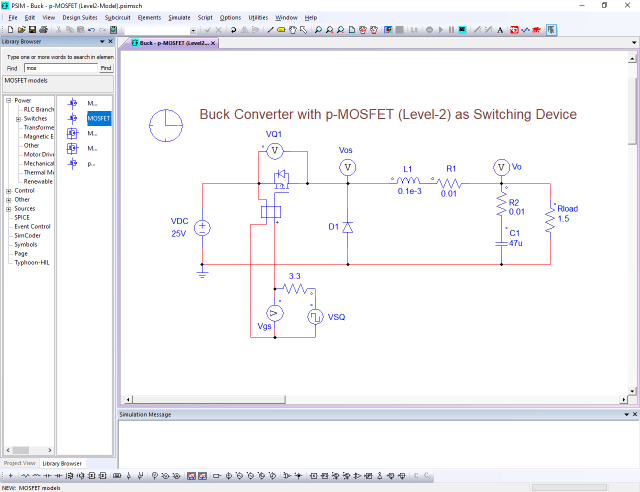
圖 5:降壓轉換器的示意圖示例
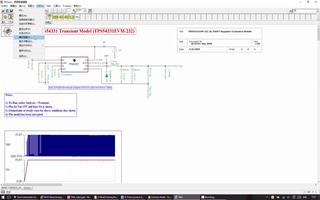
瞬態電壓電平準確地顯示在仿真圖上,如圖 6所示。
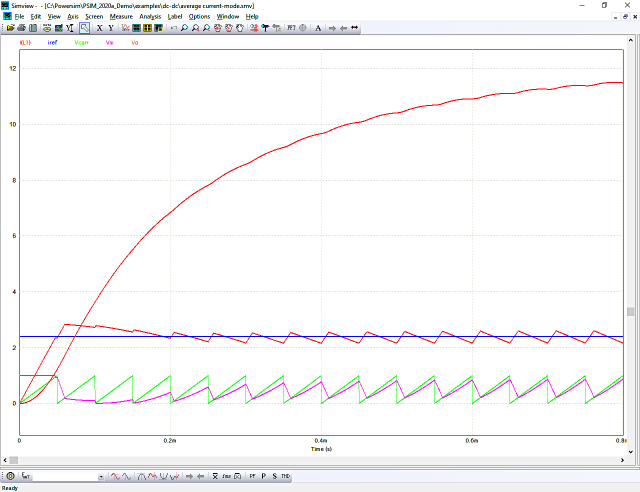
圖 6:模擬圖
電機驅動模塊
這是基本 PSIM 程序的附加模塊。它為電機驅動系統研究提供機器模型和機械負載模型以及電機(見圖 7)。它節省了設計基于電力電子的復雜電機控制系統的時間。由于機器和控制器建模的復雜性,驅動系統的分析和設計都是一個挑戰。它包含常用的電機模型、機械負載和控制塊(例如 MTPA 和 FWControl)。還可以使用永磁同步電機 (PMSM)、開關磁阻、感應電機和無刷電機。
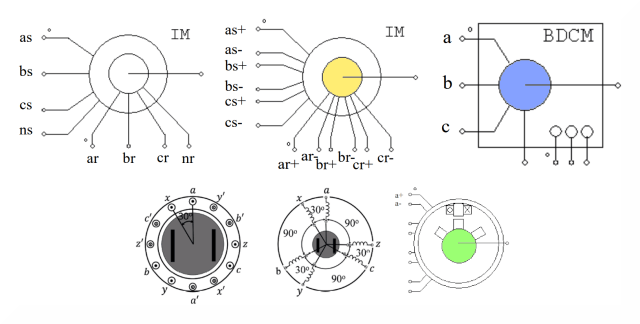
圖 7:PSIM 提供不同類型的電機。
為了模擬目的,需要指定的一些重要參數包括以下信息:
Ra:電樞繞組電阻,單位為歐姆
La:電樞繞組電感,單位為亨利
Rf:繞組場電阻,以歐姆為單位
Lf:繞組磁場的電感,單位為亨利
機器轉動慣量,kg × m 2
Vt:電樞端子的額定電壓,單位為伏特
Ia:額定電樞電流,單位為安培
n:額定轉速,每分鐘轉數
該模塊允許電機控制的相對簡單的設計。給定系統的輸入規格,在高層,程序自動設計所有必要的控制器。輸入每個模塊的參數后,可以根據工作條件生成具有所有參數大小的電路,并且電路已準備好進行仿真。通常,電機驅動系統由直流母線、逆變器、電機、控制器和機械負載組成。
組件和組件
PSIM 包括任何電子的、虛擬的、理想的和真實的組件。提供的庫非常廣泛,可以通過 SPICE 模型無限擴展。以下簡短列表(但并非詳盡無遺)是一個證明:電阻器、電感器、電容器、變阻器、飽和電感器、三相 P/Q 控制負載、三相交流電、電纜、非線性元件、二極管、發光二極管 (LED)、齊納二極管、雙向可控硅、晶閘管和 TRIAC、NPN 和 PNP 晶體管、理想 BJT、MOSFET、IGBT、GTO、雙向開關、門控塊、預制開關模塊、二極管橋模塊、晶閘管橋模塊、逆變器模塊、 NPC 橋模塊、變壓器、磁性元件、繞組、漏磁通路徑、氣隙、線性磁芯、飽和磁芯、運算放大器、并聯穩壓器、光耦合器、dV/dt 塊、繼電器、電機驅動模塊、
電池型號
需要特別注意用戶可以根據需要選擇不同的電池型號(見圖8)。在這種情況下,可以選擇許多運行參數,以完美地遵循發電機的特性。
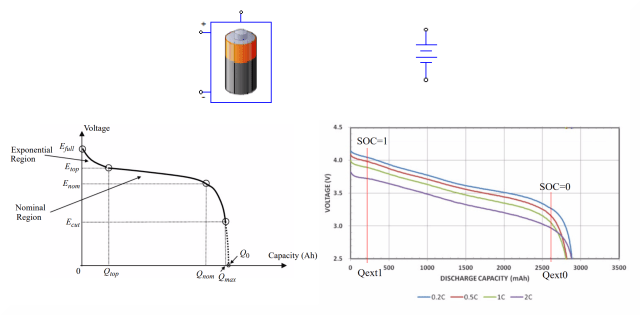
圖 8:電池模塊主要用于模擬鋰電池。
今天的電池管理是一個極其敏感的領域。蓄能器的使用,在幾乎任何技術分支中,都要求設計者和用戶最大限度地保護它們。主要目標集中在優化自主性和更長的電池壽命。
與此類模擬并行,查看ION Energy 項目很有用,該項目旨在創建從設計到分配的高質量電池。ION Energy 的電池設計和生態系統側重于可定制和模塊化的方法,旨在設計特定用途的鋰離子 (Li-ion) 和 BMS 電池組(見圖 9)。根據應用類型和鋰離子電池的要求,將仔細選擇正確的電池化學成分和最有效的材料,以實現最大效率。一旦選擇了理想的鋰離子電池,就必須評估對應用的所有適應性,以驗證最大效率。鋰離子電池最重要的參數之一是溫度。對于高效和持久的電池,熱管理起著關鍵作用。因此,還需要設計足夠的冷卻系統。最后的步驟之一是電池的設計和機電組裝,通過適合最終應用的合適外殼。“我們的旗艦電池管理和智能平臺融合了嵌入式電子和數據分析,以提高鋰離子電池的壽命和性能,”聯合創始人兼首席執行官 Akhil Aryan 說。ION Energy 的高質量軟件和模塊化硬件可確保故障安全操作并保護電池免受過充電、熱放電和過流的影響。
“電池之間的退化率并不一致,”Aryan 說。“即使在同一個機架內,由于不同的操作條件,不同的電池也可能以不同的速度退化。每個項目中有數千個包,因此可靠地發現問題并采取必要的措施變得很復雜。這就是數據分析和軟件被證明有用的地方——它可以監控每個電池組并提出優先行動,從而在出現問題時及時采取行動,幫助維持安全操作和長效電池。
“現在,愛迪生分析的目標是電網規模和公用事業規模的電池儲能系統,”他補充道。“我們與 esVolta 的合作是迄今為止該領域最大的電池智能交易之一。今天的電池儲能行業是一個即將到來的空間,也是提高電網可靠性和效率的重要技術。”
到2022年,全球電池產能將超過400GWh。因此,需要更智能的電池管理才能實現可靠高效的電池運行。該公司基于軟件的方法結合了先進的電子技術、機器學習軟件和人工智能。這是通過引入電子平臺即服務 (PaaS) 模型來實現的,該模型通過節省相關成本來優化生產。高性能電池的設計是ION Energy的強項。可能的應用包括輕型電動和混合動力汽車、摩托車、踏板車和三輪汽車。這些系統不僅包括電池,還支持超級電容器。借助先進的算法,該公司能夠對電池進行充電狀態 (SOC) 和健康狀態 (SOH) 估計。除了傳統的過壓、欠壓、過流、過溫、欠溫保護措施外,公司還開發并實施了檢測電路和測試算法,以防止故障,使電池安全。但簡單的保護電路是不夠的。電池是最終應用的重要且昂貴的組件。因此,BMS 配備了內存來記錄電池壽命的每一秒。軟件平臺允許工程師訪問這些數據并提取信息以改進電池和應用設計。主要目標是使電池的使用壽命盡可能長。平均而言,鋰離子電池在整體狀況開始惡化之前可持續使用大約 800 到 1,000 次充電/放電循環。對于電動滑板車,這種自主性相當于覆蓋了10,000到15,000公里,這并不多。使用從實現中收集的信息,可以在各種天氣條件下顯著增加此限制。將獲得的所有知識轉化為算法,以防止電池單元可能出現的劣化并延長其壽命。
具有保形形狀和多種功能的電池可以為機器人設備的設計提供新的自由度,如今這些設備已經能夠執行令人難以置信的壯舉。它們可以達到更高高度的一種方法是,如果它們的某些結構材料使它們的能量儲存增加一倍,就像動物的脂肪一樣。科學家們現在已經用多功能電池證明了這種方法,該電池將蝎子形機器人的結構材料加倍。這項工作由密歇根大學的工程師進行,他們正在研究廉價、無毒的鋅 (Zn) 電池為新一代機器人設備提供動力的潛力。
“我們在這些電池中使用鋅空氣化學代替典型的鋰離子電池,這使我們能夠在電池容量和充電率方面取得巨大進步,”密歇根大學的 Nick Kotov 教授說。“它的實施使我們能夠完全擺脫傳統的獨立電池,并使我們的電池成為機器人“器官”的一部分。這與生物體內儲存能量的方式相同;因此,這些電池是生物形態的。使鋅空氣化學作用于可用于這種容量的電池的關鍵部分是強離子分離膜的化學設計,使這些電池能夠充電。適合仿生分布式儲能,膜的結構也是使用來自大自然的模板設計的。
他補充說:“鋰礦非常稀有,而且開采成本很高。” “鋰離子電池還需要使用易燃電解質來增加功率。鋅空氣電池由地球上豐富的金屬制成。它們還可以存儲比經典鋰離子電池多 3 倍的能量。最重要的是,使它們可充電的仿生納米纖維膜可以通過回收使用過的 Kevlar 背心來批量生產,否則會導致塑料污染。”
新的存儲解決方案與強大的分析解決方案的重要性將使電力電子設備能夠提供越來越多的新的最先進的解決方案。
審核編輯:劉清










 工商網監
工商網監
評論