 電子發(fā)燒友App
電子發(fā)燒友App


摘要:本文闡明了變電站電壓無(wú)功的控制原理,控制方式。 同時(shí),本文詳述了各種控制策略,分析了人工智能技術(shù)在電壓無(wú)功控制中的作用。尤其分析了目前電力系統(tǒng)廣泛使用的“九區(qū)圖”法所存在的問(wèn)題,以及基于此的各種改進(jìn)策略。最后本文對(duì)我國(guó)變電站電壓無(wú)功控制的現(xiàn)狀和未來(lái)發(fā)展所需要注意的問(wèn)題進(jìn)行了總結(jié)。
1 引言
電力系統(tǒng)中,電壓時(shí)衡量電能質(zhì)量的一項(xiàng)重要 指標(biāo),電壓波動(dòng)過(guò)大,不僅影響電氣設(shè)備的利用效 率和使用壽命,而且會(huì)危及系統(tǒng)的安全穩(wěn)定運(yùn)行, 甚至?xí)痣妷罕罎ⅲ⒃斐纱竺娣e的停電事故。 同時(shí),無(wú)功功率也是影響電壓質(zhì)量的一個(gè)重要因素, 實(shí)現(xiàn)無(wú)功的分層、分區(qū)就地平衡,是降低網(wǎng)損的重 要手段,因此各級(jí)變電站承擔(dān)著電壓無(wú)功調(diào)節(jié)的重 要任務(wù)。
在變電站中,電壓無(wú)功控制(voltage reactive power control,VQC)主要采取的是利用有載變壓 器和并聯(lián)補(bǔ)償電容器組進(jìn)行局部的電壓及無(wú)功補(bǔ) 償?shù)淖詣?dòng)調(diào)節(jié),以保證負(fù)荷側(cè)母線電壓在規(guī)定的范 圍內(nèi)及進(jìn)線功率因素盡可能接近 1。 VQC 保證了電壓合格、無(wú)功基本平衡,同時(shí)也減少了變壓器和電 容器的調(diào)節(jié)次數(shù)。頻繁操作有載調(diào)壓變壓器分接頭 開(kāi)關(guān)和投切并聯(lián)補(bǔ)償電容器會(huì)引起變壓器和開(kāi)關(guān) 設(shè)備故障,因此各變電站對(duì)其每天的調(diào)節(jié)次數(shù)均有 嚴(yán)格的限制。采取合理的控制策略和控制手段,能 夠降低電容器組的平均運(yùn)行溫度、減少投切開(kāi)關(guān)的 動(dòng)作次數(shù)及變壓器分接開(kāi)關(guān)的調(diào)節(jié)次數(shù),可延長(zhǎng)開(kāi) 關(guān)、電容器、變壓器的使用壽命。
變電站電壓無(wú)功的調(diào)節(jié)性能與VQC的控制策 略是密切相關(guān)的。 VQC裝置的研究是從上世紀(jì)70年 代開(kāi)始的,如今內(nèi)外已形成了一整套比較成熟的控 制策略[1~3]。近年來(lái),隨著電力系統(tǒng)信號(hào)采集和處 理技術(shù)、高速通信技術(shù)和衛(wèi)星同步授時(shí)技術(shù)的迅速 發(fā)展[4],為區(qū)域電網(wǎng)電壓與無(wú)功的多級(jí)分層與分 區(qū)協(xié)調(diào)控制提供了技術(shù)支撐[5]。
本文首先論述了變電站無(wú)功綜合控制的幾種控制方式,隨后對(duì)各種變電站電壓無(wú)功控制策略做了詳細(xì)的介紹和分析,最后對(duì)現(xiàn)在變電站常用的 “九區(qū)圖”法的改進(jìn)策略作了詳細(xì)說(shuō)明和分析。
2 變電站電壓無(wú)功綜合控制的主要方式
當(dāng)系統(tǒng)無(wú)功電源不足時(shí),不宜采用調(diào)整變壓器變比的方法來(lái)提高電壓,而必須增設(shè)無(wú)功補(bǔ)償裝置。 目前,國(guó)內(nèi)外主要采用有載調(diào)壓變壓器和補(bǔ)償并聯(lián)電容器組,通過(guò)自動(dòng)調(diào)節(jié)有載變壓器的分接頭位置和投切并聯(lián)電容器來(lái)實(shí)現(xiàn)調(diào)節(jié)電壓合格和無(wú)功平衡的目的。其控制方式分三種[6]:
2.1 集中控制方式
集中控制是指在調(diào)度中心對(duì)各個(gè)配電中心的調(diào)壓 設(shè)備和無(wú)功補(bǔ)償設(shè)備進(jìn)行統(tǒng)一控制。這種控制方式 從理論上講是保持系統(tǒng)電壓正常和實(shí)現(xiàn)無(wú)功平衡 以及提高系統(tǒng)運(yùn)行可靠性和經(jīng)濟(jì)性的最佳方案。但 它要求調(diào)度中心必須具有因地制宜的電壓和無(wú)功 優(yōu)化實(shí)時(shí)控制軟件,而且它需要對(duì)各配電中心具有
2011-2012 學(xué)期電力自動(dòng)化系統(tǒng)課程論文
遙測(cè)、遙信和遙控的功能, 對(duì)通道的可靠性要求高。 另外,最好各配電中心具備智能執(zhí)行單元。但在我 國(guó)目前各變電站的基礎(chǔ)自動(dòng)話層次不一的情況下, 實(shí)現(xiàn)全系統(tǒng)的集中優(yōu)化控制難度還比較大。
2.2 分散控制
分散控制是我國(guó)當(dāng)前進(jìn)行電壓無(wú)功綜合控制 的組要方式。它是在各個(gè)變電站或發(fā)電廠中,自動(dòng) 調(diào)節(jié)有載調(diào)壓變壓器的分接頭位置和其它電壓調(diào) 節(jié)器,控制無(wú)功功率補(bǔ)償設(shè)備的工作狀態(tài),使得當(dāng) 前負(fù)荷變化時(shí),該地區(qū)的電壓和無(wú)功功率保持在規(guī) 定的范圍內(nèi)。分散控制對(duì)提高受控站供電范圍內(nèi)的 電壓質(zhì)量和降低局部網(wǎng)絡(luò)變壓器的電能損耗,減輕 值班員的操作很有價(jià)值,但它只能實(shí)現(xiàn)局部?jī)?yōu)化, 無(wú)法實(shí)現(xiàn)全局優(yōu)化。
2.3 關(guān)聯(lián)分散控制方式
關(guān)聯(lián)分散控制是指在正常運(yùn)行情況下,由安裝 在各站的關(guān)聯(lián)分散控制裝置根據(jù)設(shè)計(jì)好的控制規(guī) 律對(duì)電壓進(jìn)行控制,調(diào)控范圍和整定值是從整個(gè)系 統(tǒng)的安全、穩(wěn)定和經(jīng)濟(jì)運(yùn)行出發(fā),可先由電壓無(wú)功 優(yōu)化程序計(jì)算好,做出責(zé)任分散、控制分散、危險(xiǎn) 分散;而在緊急情況下或系統(tǒng)運(yùn)行方式發(fā)生大的變 動(dòng)時(shí),則可由調(diào)度中心直接控制或由調(diào)度中心修改 下屬變電站所維持的母線電壓和無(wú)功功率的整定 值,以滿足系統(tǒng)安全、穩(wěn)定、經(jīng)濟(jì)運(yùn)行的新要求, 從而從根本上提高全系統(tǒng)的可靠性和經(jīng)濟(jì)性。該控 制方式要求執(zhí)行關(guān)聯(lián)分散控制任務(wù)的裝置一方面 要有較高的智能水平,能夠進(jìn)行邏輯分析、判斷、 自動(dòng)修改調(diào)整控制規(guī)律;另一方面要有強(qiáng)大的通訊 能力和手段,既能方便地向上級(jí)調(diào)度中心遞交正常 運(yùn)行報(bào)告,又能接受調(diào)度中心的各種控制命令。但 是這種方式需要采用專門(mén)的關(guān)聯(lián)分散控制裝置,這 就會(huì)帶來(lái)投資成本的增加。
3 電壓無(wú)功控制的調(diào)節(jié)判據(jù)
變電站的電壓無(wú)功控制其實(shí)是一個(gè)多目標(biāo)(電 壓合格、無(wú)功平衡)及多約束(無(wú)功功率上下限、 電壓上下限、并聯(lián)電容器投切次數(shù)和調(diào)壓變壓器分 接頭動(dòng)作次數(shù))的最優(yōu)控制問(wèn)題。但是,對(duì)于這個(gè) 多輸入多輸出的閉環(huán)控制系統(tǒng)(MIMO),實(shí)際上很 難建立精確的數(shù)學(xué)模型。目前所采用的實(shí)用有效的 控制策略是根據(jù)工程實(shí)用算法得到的。按控制策略 的不同可分為以下幾種:
3.1 單一控制策略
3.1.1 按功率因素控制
功率因素?cái)?shù)值實(shí)時(shí)變化是在一定范圍內(nèi)的,以 功率因素作為判據(jù)是,即當(dāng)功率因素低于所設(shè)定的 變化范圍下限時(shí),電容器組投入,當(dāng)功率因數(shù)高于 所設(shè)定的變化范圍區(qū)間的上限時(shí),電容器組切除。 但是這種控制方式?jīng)]有考慮投切并聯(lián)電容器后無(wú) 功功率的變化對(duì)母線電壓的影響,而且假如負(fù)荷較 小,投切電容器組產(chǎn)生的無(wú)功功率的變化會(huì)使功率 因數(shù)發(fā)生較大的變化,因此,投切電容器組的動(dòng)作 過(guò)于頻繁, 極易引起投切振蕩。 為了克服這些缺陷, 出現(xiàn)了改進(jìn)的自動(dòng)投切裝置,這種裝置根據(jù)負(fù)載區(qū) 的不同自動(dòng)整定各負(fù)載區(qū)不同的功率因數(shù),并采用 自動(dòng)選取法進(jìn)行自動(dòng)投切,此外,臨界因數(shù)法也是 一種解決臨界振蕩問(wèn)題經(jīng)常采用的方法,這種方法 限定了輕負(fù)荷時(shí)的臨界震蕩區(qū),有效地解決了電容 器投切的振蕩問(wèn)題。
3.1.2 按電壓控制
電壓控制是通過(guò)實(shí)施監(jiān)控母線電壓的變化看、來(lái)進(jìn) 行電容器組的投入或切除操作。當(dāng)母線電壓低于所 設(shè)定的限定值時(shí),投入相應(yīng)數(shù)量的補(bǔ)償電容器組, 當(dāng)母線電壓高于所設(shè)定的變化范圍限定值時(shí),自動(dòng) 切除相應(yīng)數(shù)量的補(bǔ)償電容器組。但是這種判據(jù)忽略 了無(wú)功功率因數(shù)平衡這個(gè)要求,雖然對(duì)母線電壓的 調(diào)節(jié)取得了一定的效果,但是在無(wú)功功率補(bǔ)償問(wèn)題 上,作用并不明顯。
3.2 綜合控制策略
3.2.1 按電壓和晝夜時(shí)間負(fù)荷控制
此方法是通過(guò)研究采集到的變電站的日負(fù)荷 曲線變化特點(diǎn),然后通過(guò)給曲線分段來(lái)確定負(fù)荷時(shí) 段分布的。采用這種方法,可以在不同負(fù)荷階段及 時(shí)監(jiān)控變電站電壓和無(wú)功功率,調(diào)節(jié)變壓器的分接 頭和并聯(lián)電容器組。由于需要對(duì)負(fù)荷進(jìn)行分段,此 方法的適應(yīng)性較差,只適和變電站的負(fù)荷比較穩(wěn)定 的情況,而且隨著季節(jié)和負(fù)荷的不斷變化,負(fù)荷時(shí) 段的劃分需要進(jìn)行相應(yīng)調(diào)整。
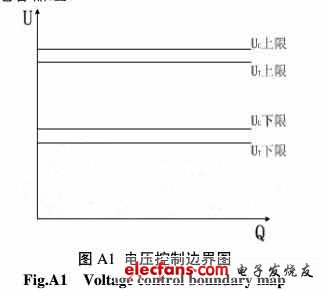
3.2.2 按電壓綜合控制有載分接開(kāi)關(guān)和電容器組
其電壓控制邊界如圖 A1 所示,當(dāng)母線電壓 U≤ Ut下限時(shí), 降有載分接開(kāi)關(guān)升壓;當(dāng) U≤Uc 下限 時(shí),投入電容器組;當(dāng) U≥ Ut上限時(shí),升有載分接 開(kāi)關(guān)降壓;當(dāng) U≥Uc 上限時(shí),切除電容器組。這種 方案比僅調(diào)節(jié)電容的方案好一些,但仍沒(méi)有考慮無(wú) 功的補(bǔ)償效果,且調(diào)節(jié)過(guò)程也不合理,比如電壓高是升有載分接開(kāi)關(guān)還是切電容,要首先判別電壓高 是由無(wú)功過(guò)剩引起的還是由于有載分接開(kāi)關(guān)位置 過(guò)低引起的,不能簡(jiǎn)單的規(guī)定調(diào)有載分接開(kāi)關(guān)或是 投切電容器組。
3.2.3 按電壓和功率因數(shù)復(fù)合控制
按電壓、功率因數(shù)復(fù)合控制構(gòu)成的判據(jù)有兩種 判別方式,一是以電壓以主,功率因數(shù)為輔,即只 要電壓合格, 則不考慮功率因數(shù), 當(dāng)電壓不合格時(shí), 根據(jù)電壓和功率因數(shù)的性質(zhì)決定電容器組的自動(dòng) 投切;另一種是以電壓和功率因數(shù)作為兩個(gè)并行的 判據(jù),即使電壓在合格范圍內(nèi),如果功率因數(shù)滿足 投切的條件,則對(duì)電容器組發(fā)出投切指令。第一種 判別方式,盡管考慮了無(wú)功補(bǔ)償效果,但由于在某 些運(yùn)行狀態(tài)下,缺無(wú)功補(bǔ)不上去,超無(wú)功切不下, 致使無(wú)功補(bǔ)償效果仍然較差;第二種判別方式, 在某 些運(yùn)行狀態(tài)存在對(duì)并聯(lián)補(bǔ)償電容頻繁誤投切現(xiàn)象。
3.2.4 電壓和無(wú)功綜合控制
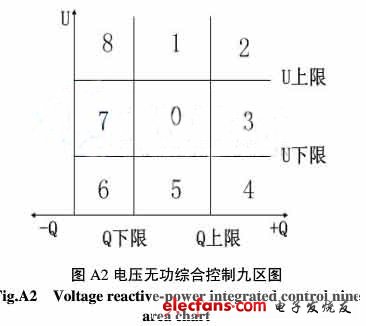
利用電壓和無(wú)功構(gòu)成綜合判據(jù),按照電壓上、 下限和無(wú)功上、下限將運(yùn)行區(qū)域劃分為九個(gè)區(qū),形 成了目前應(yīng)用最廣泛的“九區(qū)圖”控制理論。在變 電站實(shí)際運(yùn)行中, 根據(jù)采集的電壓、 無(wú)功數(shù)據(jù)信息, 來(lái)判斷當(dāng)前運(yùn)行在哪個(gè)區(qū)域,然后分別按照九區(qū)圖 的每個(gè)區(qū)的控制調(diào)節(jié)策略,制定變壓器分接頭擋位 和補(bǔ)償電容器組的投切控制策略。在圖 A2 中,U 上限和 U 下限根據(jù)電壓合格范圍確定, 有時(shí)為了實(shí) 現(xiàn)電壓逆調(diào)整,需要根據(jù)各個(gè)負(fù)荷時(shí)段確定電壓的 上、 下限;Q 上限和 Q 下限是根據(jù)每組電容器容量、 電容偏差及無(wú)功基本平衡和保持投切基本穩(wěn)定原 則確定。Q 下限表示無(wú)功過(guò)剩,Q 上限表示無(wú)功不 足。各個(gè)區(qū)的控制規(guī)則如下[7,8]:
0 區(qū)——電壓無(wú)功均合格,不調(diào)節(jié),此區(qū)為穩(wěn) 定工作區(qū)。
1 區(qū)——電壓越上限,降壓。
2 區(qū)——電壓越上限,無(wú)功越上限,先降壓, 如無(wú)功仍越上限,投電容。
3 區(qū)——電壓合格,無(wú)功越上限,投電容。 4 區(qū)——電壓越下限, 無(wú)功越上限, 先投電容, 若電壓仍越下限則升壓。
5 區(qū)——電壓越下限,升壓。
6 區(qū)——電壓越下限,無(wú)功越下限,先升壓, 如無(wú)功仍越下限,切電容。
7 區(qū)——電壓合格,無(wú)功越下限,切電容。
8 區(qū)——電壓越上限, 無(wú)功越下限, 先切電容, 如電壓仍越上限則降壓。
3.3 基于人工智能的電壓無(wú)功控制策略
3.3.1 基于模糊控制理論的電壓無(wú)功控制原理
模糊控制適用于不確定的、有不同量綱的、相 互沖突的多目標(biāo)優(yōu)化問(wèn)題。通過(guò)模糊隸屬度函數(shù), 把電壓和無(wú)功偏差量、分接頭檔位、可調(diào)電容器組 數(shù)等模糊化處理,轉(zhuǎn)化為模糊集論域的詞變量,作 為模糊控制器的輸入。控制器的輸出對(duì)應(yīng)于控制規(guī) 則表內(nèi)電壓和無(wú)功偏差的一種組合,最后把控制器 的輸出模糊化,得到作用于分接頭調(diào)節(jié)和電容器組 投切控制的精確值。
模糊算法所需信息量少、計(jì)算量小,且能很好 的反映電壓的變化情況,容易在線實(shí)現(xiàn),在模糊控 制下,系統(tǒng)的電壓性能及穩(wěn)定性均有令人滿意的控 制效果[9]。
3.3.2 基于人工神經(jīng)網(wǎng)絡(luò)負(fù)荷預(yù)測(cè)的電壓無(wú)功控制
原理 人工神經(jīng)網(wǎng)絡(luò)有集體運(yùn)算和自適應(yīng)學(xué)習(xí)的能 力,有預(yù)測(cè)性、指導(dǎo)性和靈活性的特點(diǎn),將無(wú)功預(yù) 測(cè)與優(yōu)化決策相結(jié)合,該控制策略首先將相關(guān)的歷 史數(shù)據(jù)輸入無(wú)功預(yù)測(cè)神經(jīng)網(wǎng)絡(luò)訓(xùn)練樣本集,再將負(fù)荷預(yù)測(cè)結(jié)果及電壓、無(wú)功、功率因數(shù)等系統(tǒng)實(shí)時(shí)數(shù) 據(jù)模糊化,輸入控制決策神經(jīng)網(wǎng)絡(luò),輸出控制信號(hào) [10]。
利用神經(jīng)網(wǎng)絡(luò)技術(shù),分析電壓發(fā)生變化的原因 和趨勢(shì),確定綜合控制策略,能大大減少變壓器分 接頭調(diào)節(jié)次數(shù)。
3.3.3 基于專家系統(tǒng)的電壓無(wú)功控制原理
專家系統(tǒng)是在一個(gè)特定領(lǐng)域內(nèi)用人類專家水 平去解決該領(lǐng)域中難以用精確數(shù)值模型表示的困 難問(wèn)題的計(jì)算機(jī)程序。專家系統(tǒng)的基本思想是讓計(jì) 算機(jī)能夠存儲(chǔ)某一領(lǐng)域的專門(mén)知識(shí),并能夠像專家 那樣有效地利用這些知識(shí)去解決該領(lǐng)域的復(fù)雜問(wèn) 題。
專家系統(tǒng)具有啟發(fā)性、 透明性、 靈活性等特點(diǎn)。 在實(shí)際應(yīng)用中,運(yùn)行調(diào)試人員預(yù)先根據(jù)經(jīng)驗(yàn)和具體 要求,根據(jù)可能出現(xiàn)的各種情況制定一套基于規(guī)則 的專家系統(tǒng)。運(yùn)行時(shí),專家系統(tǒng)針對(duì)具體的變電站 配置情況、電壓等級(jí)、系統(tǒng)運(yùn)行時(shí)段,模擬專家決 策的過(guò)程,根據(jù)規(guī)則綜合、智能地調(diào)節(jié)無(wú)功電壓, 從而達(dá)到預(yù)期的控制目標(biāo)。目前許多學(xué)者利用專家 系統(tǒng)這些優(yōu)點(diǎn)和特點(diǎn)研究開(kāi)發(fā)變電站無(wú)功電壓專 家系統(tǒng)的控制策略。它的典型應(yīng)用是將己有無(wú)功電 壓控制經(jīng)驗(yàn)或知識(shí)用規(guī)則表示出來(lái),形成專家系統(tǒng) 的知識(shí)庫(kù),進(jìn)而根據(jù)上述的規(guī)則由無(wú)功電壓實(shí)時(shí)變 化值求取電壓的調(diào)節(jié)控制手段[11]。
?
3.3.4 基于遺傳算法的電壓無(wú)功控制原理
遺傳算法(GA)是一種通過(guò)模仿生物遺傳和進(jìn)化過(guò)程尋求復(fù)雜問(wèn)題的全局最優(yōu)解的搜索和優(yōu)化方法。遺傳算法具有較高的魯棒性和廣泛的適應(yīng)性, 對(duì)求解問(wèn)題幾乎沒(méi)有什么限制,也不涉及常規(guī)優(yōu)化問(wèn)題求解的復(fù)雜數(shù)學(xué)過(guò)程,并能夠獲得全局的最優(yōu)解集,因此在電力系統(tǒng)研究涉及優(yōu)化問(wèn)題的領(lǐng)域中得到了廣泛的應(yīng)用。利用遺傳算法求解實(shí)際問(wèn)題的過(guò)程是,首先將實(shí)際問(wèn)題編碼成染色體,將實(shí)際問(wèn)題的目標(biāo)函數(shù)轉(zhuǎn)化為染色體的適應(yīng)函數(shù),然后在初 始種群的基礎(chǔ)上,按一定的適應(yīng)值在種群中選擇個(gè)體,使之進(jìn)行生殖,交叉,變異等遺傳操作,產(chǎn)生下一代種群,這樣逐代遺傳,直到滿足期望的終止 條件。
通過(guò)遺傳算法搜索變壓器分接頭的檔位和投切電容器組的組合,得出母線電壓,再根據(jù)電壓求 解線路和變壓器損耗,并統(tǒng)計(jì)投切電容器組數(shù),計(jì)算出適應(yīng)度函數(shù),尋找適應(yīng)函數(shù)最小的優(yōu)化方案。 由于有歷史數(shù)據(jù)的指導(dǎo)以及遺傳算法強(qiáng)大的尋優(yōu)能力,采用所提方法進(jìn)行控制時(shí),使電壓合格、裕度較大,從而系統(tǒng)的安全經(jīng)濟(jì)性能更高[12]。
4 目前變電站電壓與無(wú)功綜合控制策略的問(wèn)題及其改進(jìn)
4.1 傳統(tǒng)控制策略存在的問(wèn)題
目前工程實(shí)際中應(yīng)用最廣泛的是傳統(tǒng)的“九區(qū)圖”理論,按照電壓上、下限和無(wú)功上、下限將運(yùn)行區(qū)域劃分為九個(gè)區(qū),各個(gè)區(qū)域?qū)?yīng)不同的控制策略,根據(jù)實(shí)時(shí)電壓、無(wú)功所在的運(yùn)行區(qū)域,采取相應(yīng)的控制方法。
“九區(qū)圖”的無(wú)功調(diào)節(jié)判據(jù)是一個(gè)與電壓無(wú)關(guān)的平行于電壓坐標(biāo)軸的固定邊界線,而實(shí)際運(yùn)行中無(wú)功的調(diào)節(jié)對(duì)電壓是有影響的,但在“九區(qū)圖”中 無(wú)功的調(diào)節(jié)的邊界竟然與電壓狀態(tài)無(wú)關(guān),因此產(chǎn)生一系列問(wèn)題:
(1)控制策略是基于固定的電壓無(wú)功上下限而未考慮無(wú)功調(diào)節(jié)對(duì)電壓的影響及其相互協(xié)調(diào)關(guān)系, 造成控制振蕩、頻繁動(dòng)作問(wèn)題。
(2)用于運(yùn)算分析的信息具有隨機(jī)性、分散 性的特點(diǎn),造成了控制決策的盲目性和不確定性, 實(shí)際表現(xiàn)為裝置頻繁調(diào)節(jié)。
(3) “九區(qū)圖”的某些區(qū)對(duì)于兩類設(shè)備的控制 都起作用時(shí),難于區(qū)分哪一類效果更好。
(4) “九區(qū)圖”中兩類設(shè)備動(dòng)作的先后順序?qū)?控制結(jié)果影響很大,如順序不當(dāng)會(huì)產(chǎn)生頻繁動(dòng)作、 投切振蕩等現(xiàn)象。
(5) “九區(qū)圖”對(duì)于控制設(shè)備的使用是無(wú)限次 的,而實(shí)際操作中分接頭調(diào)節(jié)和電容器組投切次數(shù) 是有嚴(yán)格限制的。
(6)由于“九區(qū)圖”中只要進(jìn)入第 0 區(qū)就不 會(huì)再有調(diào)節(jié),可能造成系統(tǒng)長(zhǎng)時(shí)間運(yùn)行在電壓、無(wú) 功或功率因數(shù)不合格狀態(tài)邊緣,而不能做到將系統(tǒng) 控制在額定最佳運(yùn)行狀態(tài)。
4.2 九區(qū)圖的改進(jìn)
電壓無(wú)功綜合控制策略應(yīng)綜合考慮變壓器分 接頭和電容器組調(diào)節(jié)過(guò)程中,所引起的系統(tǒng)電壓無(wú) 功變化趨勢(shì)以及其它一些相關(guān)的變化。近年來(lái),針 對(duì)以上的一系列問(wèn)題進(jìn)行了改進(jìn)(如采用 17 區(qū)域圖 法、 模糊邊界法等), 雖然在一定程度上改善了控制 效果,但實(shí)際運(yùn)行效果仍不太理想。
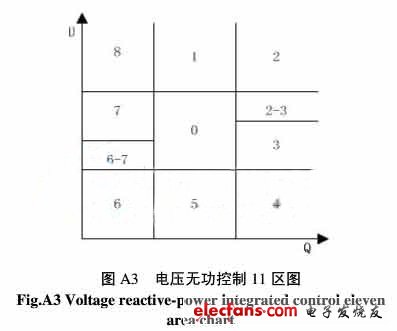
4.2.111 區(qū)圖法
針對(duì)傳統(tǒng)九區(qū)圖法對(duì)于某些區(qū)控制結(jié)果產(chǎn)生 的振蕩現(xiàn)象以及裝置頻繁動(dòng)作的缺陷,增加了 2-3 和 6-7 這兩個(gè)小區(qū)作為防震區(qū),得到如圖 A3 所示 改進(jìn)的“九區(qū)圖” 。當(dāng)運(yùn)行點(diǎn)位于 2-3(或 6-7 )小區(qū) 內(nèi)時(shí),控制策略為下調(diào)分接頭降壓(或上調(diào)接頭升 壓)。
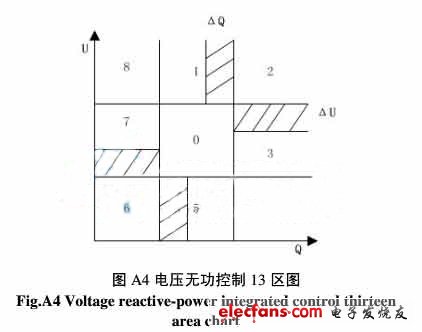
4.2.2 13 區(qū)域圖法
有人對(duì)九區(qū)圖進(jìn)行更細(xì)致的劃分,提出了較圖 A3 更加完善的改進(jìn)九區(qū)圖(實(shí)質(zhì)為 13 區(qū)域圖法), 如圖 A4 所示。
4.2.317 區(qū)圖法 更為改進(jìn)的策略是在九區(qū)圖中再細(xì)分 8 個(gè)小區(qū),采 用 17 區(qū)域圖法的控制策略。如圖 A5 所示。每個(gè)區(qū) 的控制方案可自動(dòng)整定,也可手動(dòng)整定,自動(dòng)整定 可按五種方式進(jìn)行:只考慮電壓, 只考慮無(wú)功,電壓 優(yōu)先,無(wú)功優(yōu)先,綜合考慮。
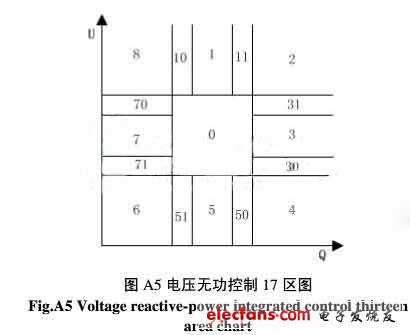
由上所述可以發(fā)現(xiàn),以上控制策略的改進(jìn)以動(dòng) 作區(qū)間的進(jìn)一步細(xì)化為特點(diǎn),然而這些改進(jìn)的控制 策略存在一個(gè)普遍問(wèn)題是控制為單向控制,認(rèn)為其 設(shè)定的限值為恒定值,即未考慮無(wú)功調(diào)節(jié)對(duì)電壓的 影響及其之間相互協(xié)調(diào)關(guān)系, VQC 一直使用這些定 值,這些定值與實(shí)際值的誤差往往會(huì)導(dǎo)致裝置的誤 動(dòng)作或控制振蕩。
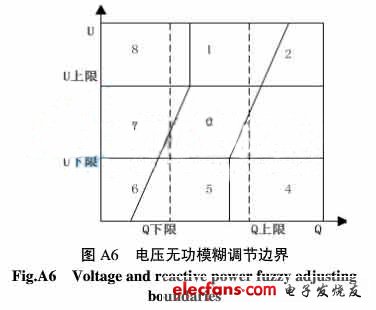
4.2.4 電壓無(wú)功模糊邊界調(diào)節(jié)
電壓調(diào)節(jié)邊界應(yīng)該是相對(duì)固定的(各個(gè)負(fù)荷時(shí) 段可不同), 無(wú)功調(diào)節(jié)邊界應(yīng)該是一個(gè)受電壓狀態(tài)影 響且在一定范圍內(nèi)服務(wù)于電壓調(diào)節(jié)的一個(gè)模糊邊 界。考慮到無(wú)功調(diào)節(jié)對(duì)電壓產(chǎn)生的影響,將電壓狀 態(tài)引入無(wú)功調(diào)節(jié)判據(jù),把原來(lái)固定的無(wú)功上下限邊 界變?yōu)槭茈妷河绊懙哪:吔纾托纬闪四:吔?的電壓無(wú)功控制策略,如圖 A6 所示。
5 結(jié)束語(yǔ)
我國(guó)目前各變電站的基礎(chǔ)自動(dòng)話層次不一的 情況下,實(shí)現(xiàn)全系統(tǒng)的集中優(yōu)化控制難度還比較大。 采用并聯(lián)分散控制雖然滿足系統(tǒng)安全、穩(wěn)定、經(jīng)濟(jì)運(yùn)行的要求,但是采用專門(mén)的關(guān)聯(lián)分散控制裝置帶 來(lái)投資成本的增加。同時(shí),分散控制仍然是我國(guó)變 電站的主要控制方式。因此,如何實(shí)現(xiàn)全系統(tǒng)的集 中優(yōu)化控制是我國(guó)未來(lái)變電站自動(dòng)化建設(shè)上所需 要解決的問(wèn)題。
變電站電壓無(wú)功綜合控制是一個(gè)多目標(biāo)、多約 束的復(fù)雜的非線性控制問(wèn)題。它受到電壓、無(wú)功、 時(shí)間、負(fù)荷率、負(fù)荷電壓靜態(tài)特性、運(yùn)行方式、有 載調(diào)壓變壓器分接頭檔位和電容器組狀態(tài)等多種 因素的影響,其控制規(guī)律難以用精確的數(shù)學(xué)模型表 達(dá)。同時(shí),作為變電站電壓無(wú)功控制的兩個(gè)主要手 段:運(yùn)用有載調(diào)壓變壓器進(jìn)行有載調(diào)壓和運(yùn)用并聯(lián) 電容器組進(jìn)行無(wú)功調(diào)節(jié),不是獨(dú)立的,他們之間存 在著一定的關(guān)聯(lián)性,在有載調(diào)壓的同時(shí)也會(huì)影響無(wú) 功,在無(wú)功調(diào)節(jié)的同時(shí)也會(huì)影響電壓。現(xiàn)在,各種 智能算法已經(jīng)與傳統(tǒng)的“九區(qū)圖”法相結(jié)合,提出 了各種改進(jìn)的控制策略。但是,如何完全解決九區(qū) 圖法的缺陷,還是需要進(jìn)一步研究。












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論