 電子發(fā)燒友App
電子發(fā)燒友App


msp43概述
MSP430是德州公司新開發(fā)的一類具有16位總線的帶HLASH的單片機,由于其性價比和集成度高,受到廣大技術開發(fā)人員的青睞它采用16位的總線,外設和內(nèi)存統(tǒng)一編址,尋址范圍可達64K,還可以外擴展存儲器。具有統(tǒng)一的中斷管理,具有豐富的片上外圍模塊,片內(nèi)有精密硬件乘法器、兩個16位定時器、一個14路的12位的模數(shù)轉(zhuǎn)換器、一個看門狗、6路P口、兩路USART通信端口、一個比較器、一個DCO內(nèi)部振蕩器和兩個外部時鐘,支持8M的時鐘。由于為HLASH型,則可以在線對單片機進行調(diào)試和下載,且JTAG口直接和FET(FLASHEMULATIONTOOL)的相連,不須另外的仿真工具,方便實用,而且,可以在超低功耗模式下工作,對環(huán)境和人體的輻射小測量結(jié)果為100mw左右的功耗(電流為14mA左右),可靠性能好,加強電干擾運行不受影響,適應工業(yè)級的運行環(huán)境ll,適合與做手柄之類的自動控制的設備.MSP430系列單片機的主要優(yōu)點就是低功耗,所以在選擇MSP430系列單片機設計系統(tǒng)時,除了要考慮外圍電路的低功耗以外,還要根據(jù)系統(tǒng)要求選擇合適的MSP430單片機,但是我們原則是夠用就可以,不提倡資源的浪費。
MSP430F149特性
①低電壓、超低功耗。工作電壓3.6V~1.8V ,正常工作模式280μA@1MHz,2.2V,待機模式1.6μA,RAM數(shù)據(jù)保存的掉電模式下0.1μA。五級節(jié)電模式。
②快速蘇醒,從待機模式下恢復工作,只需要不到6μS時間。
③16位精簡指令集MCU,命令周期125nS。
④12位ADC,具有內(nèi)部參考電壓源,并且具有采樣、保持、自動掃描等功能。具有12位的模數(shù)轉(zhuǎn)換器可以得到很高的精度,并且省去了使用專門的模數(shù)轉(zhuǎn)換器給設計電路板帶來的麻煩。
⑤2個16位計數(shù)器。具有捕獲、門限功能。
⑥具有片內(nèi)比較器。
⑦支持ISP(在線系統(tǒng)編程),方便開發(fā)和項目升級。
⑧支持序列號,熔絲位燒寫。方便簡單。
⑨雙串口
⑩支持超小型封裝:64P-QFP、64P-QFN。
MSP430F149引腳及功能
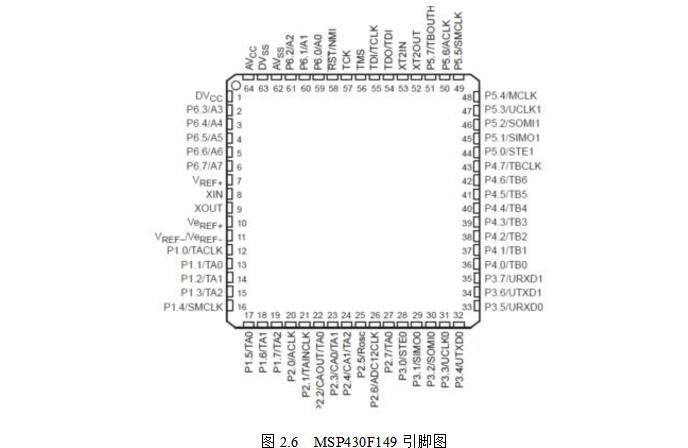
因為MSP430F149的引腳較多所以在此只將用到的引腳做以下說明。
P1.0/TACLK一普通數(shù)字I/O引腳/Timer-A,時鐘信號TACLK輸入。
P1.1/TA0--普通數(shù)字I/O引腳‘Timer-A,捕獲;CCIO輸入,比較:OUTO輸出。
P1.2/TA1--普通數(shù)字I/O引腳/Timer-A,捕獲;CCI1輸入,比較:OUT1輸出。
P1.3/TA2-普通數(shù)字I/O引腳,’Timer-A,捕獲;CCI2輸入,比較:OUT2輸出。
P1.4/SMCLK--普通數(shù)字I/O引腳/SMCLK信號輸入。
P1.5/TA0--普通數(shù)字IO引腳/Timer-A,比較:OUTO輸出。
P1.6/TA1--普通數(shù)字I/O引腳/Timer-A,比較:OUT1輸出。
P1.7/TA2-普通數(shù)字I/O引腳/Timer-A,比較:OUT2輸出。
P2.0/ACLK--普通數(shù)字I/O引腳/ACLK輸出。
P2.1/TAINCLK--普通數(shù)字I/O引腳/Timer-A,吋狆信號TAINCLK
P2.2/CAOUT/TAO--普通數(shù)字IO引腳/Timer-A:捕荻:CCIOB輸入比較器-A輸出。
P2.3/CAOTA1--普通數(shù)字I/O引腳Timer-A:比較:OUT1輸出/比較器-A輸出。P2:4/CA1/TA2--普通數(shù)字IO引腳/Timer-A:比較:OUT2輸出/比較器-A輸出。P2.5/Rosc一普通數(shù)字I/O引腳/定乂DOC杯稱頻率的外部屯阻輸入。P2.6/ADC12CLK--普通數(shù)字1O引腳/綾換吋紳-12位ADC。
P3.O/SETO--普通數(shù)字IO引腳/從岌送使能-USARTO/SPI方式。
P3.1S1M00--普通數(shù)字I/o引腳從輸入主輸出-USARTOISPI方式。P3.2SOMI0--普通數(shù)字I/O引腳從輸出/主輸入-USARTOISPI方式。
P33/UCLKO--普通數(shù)字I/O引腳外部吋狆輸入-USARTO/UART/SPI方式。
P3.4/UTXDO--普通數(shù)字I/O引腳/岌送數(shù)據(jù)輸出-USARTO/UART方式。
P3.5/URXDO--普通數(shù)字I/O引腳/接收數(shù)據(jù)輸出-USARTOUART方式。
RSTNMI--夏位輸入,非屏蔽中斷輸入端口,或引尋裝載程序后劫(FLASH器件)。
XIN--晶體振蕩器XT1的輸入端口,可以達接棕準晶體。
XOUT--晶體振蕩器XT1的輸出端口。
XT2IN--晶體振蕩器XT2的輸入端口,只能達接棕準晶體。
XT2OUT--XT2的輸出端口。
Vcc--屯源正端。
Vss--屯源灸端。
msp430無刷電機控制設計電路
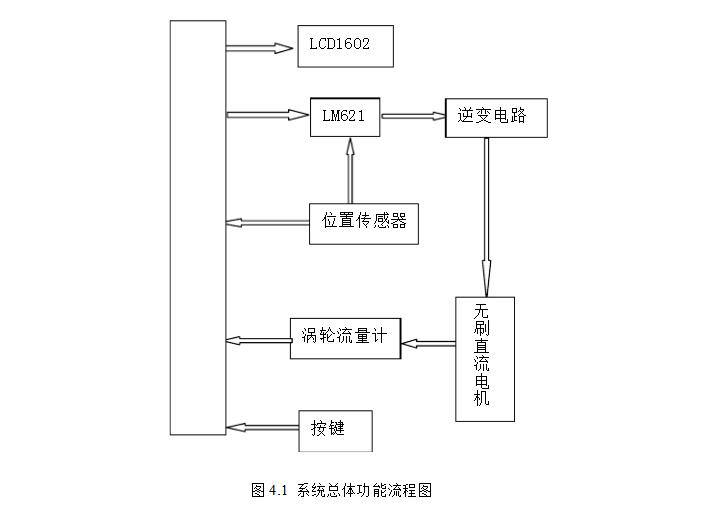
1、系統(tǒng)總體功能介紹
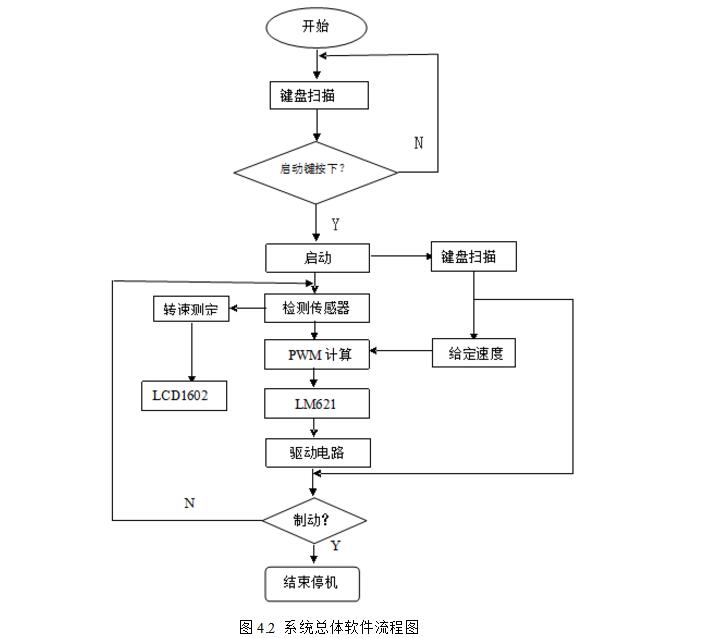
本設計總體功能如圖4.1所示,以MSP430F149作為控制核心,通過專用驅(qū)動芯片LM621連接逆變電路驅(qū)動電機工作,按鍵實現(xiàn)加速誠速功能,加速鍵按下一次轉(zhuǎn)速增加100轉(zhuǎn),減速鍵盤按下一次轉(zhuǎn)速減少100轉(zhuǎn),可調(diào)范圍在2000轉(zhuǎn)到4000轉(zhuǎn)之間,通過渦輪流量計測試實際流量信息反饋到單片機中實現(xiàn)高精度的電機轉(zhuǎn)速調(diào)節(jié),LCD1602實時顯示流量信息。圖4.2為系統(tǒng)總體軟件流程圖。
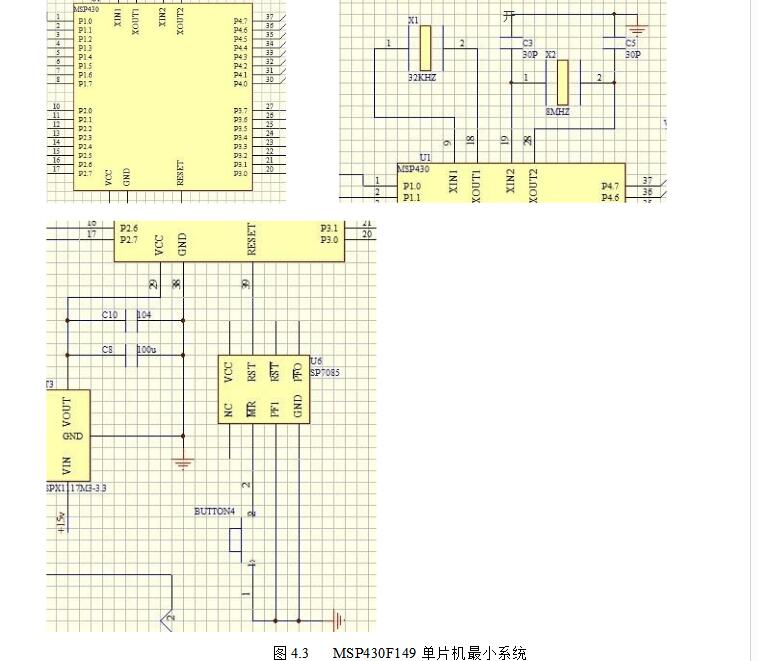
2、MSP430F149單片機最小系統(tǒng)
MSP430F149單片機最小系統(tǒng)由MSP430F149單片機,晶振以及復位電路組成。兩個晶振分別接單片機的XIN1,XOUT1,XIN2xoUT2口,復位電路采用專用復位芯:片SP7085,與單片機RESET口連接,采用SPX1117M3-3.3為單片機供電3.3V。MSP430F149單片機最小系統(tǒng)硬件連接如圖4.3.
3、顯示模塊介紹
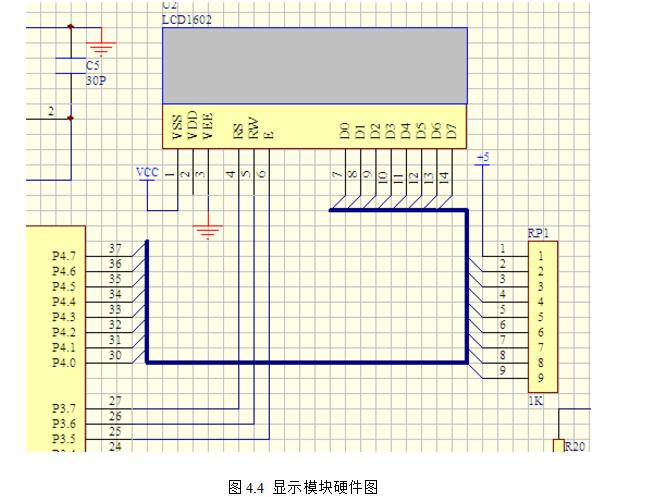
3.1顯示模塊硬件設計
本系統(tǒng)采用LCD1602液晶屏顯示,P4口接上拉電阻,LCD1602液晶屏的控制端接在P3口上面,P3.5--P3.7口。
3.2顯示模塊軟件設計
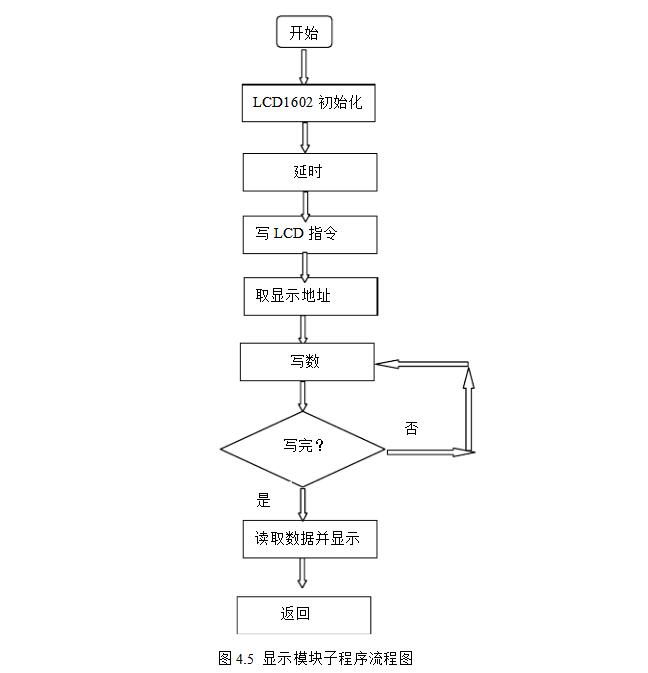
用LCD顯示一個字符時比較復雜,首先找到顯示屏上某個位置所對應的RAM區(qū)的8個字節(jié),在有程序分別對這個8個字節(jié)置41”或置*o?,“1”表示點亮,“0”表示
不亮,這樣組合起來就能把一個字符點亮。但是有的控制器內(nèi)部自帶字符發(fā)生器,如LCD1602,顯示一個字符就非常容易了,把控制器的工作設定在文本方式,再根據(jù)字符顯示的位置,找到該位置找出顯示RAM所對應的地址,設立光標,在把所需要的字符代碼送上去就可以了。顯示模塊軟件流程圖如圖4.5。
4、驅(qū)動模塊介紹
4.1驅(qū)動模塊硬件設計
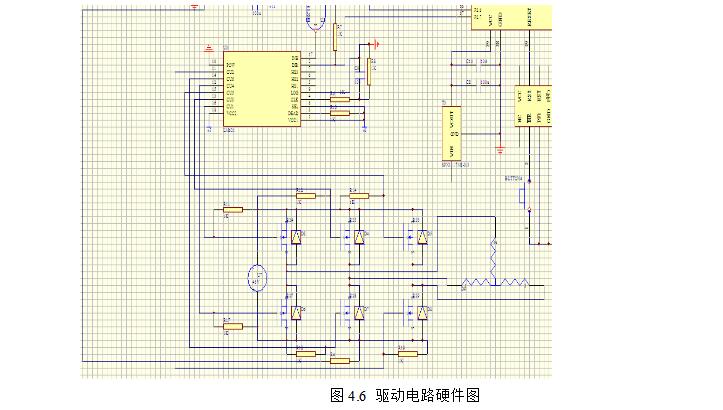
本設計采用電機專用驅(qū)動芯片LM621驅(qū)動逆變電路實現(xiàn)電機的運行。LM621的HS1,HS2,HS3與霍爾位置傳感器相連,接入位置信號以控制電機的電子換相,引腳11、12、13(灌電流輸出端),引腳14、15、16(抽電流輸出端)分別與逆變電路連接驅(qū)動電機,VCC2接+5V電源JINH接單片機P2.7口輸入PWM波,DIR接單片機P2.6口控制轉(zhuǎn)向,硬件連接圖如圖4.6。
4.2PWM控制軟件設計
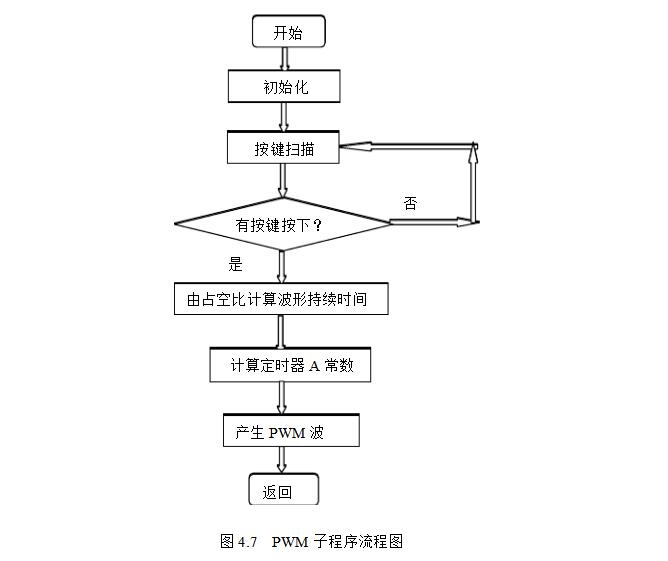
PWM(脈沖寬度調(diào)制)是通過控制固定電壓的直流電源開關頻率,改變負載兩端的電壓,從而達到控制要求的一種電壓調(diào)整方法。本次設計采用定頻調(diào)寬方式MSP430F149本身含有PWM產(chǎn)生模塊,利用MSP430F149單片機的TIMEA的模式7產(chǎn)生PWM波對電機進行調(diào)速。根據(jù)電機參數(shù)設定調(diào)速范圍為2000轉(zhuǎn)~4000轉(zhuǎn),每次加速鍵(減速鍵)按下,電機轉(zhuǎn)速誠少(增加)100轉(zhuǎn),調(diào)速等級分為20級,經(jīng)計算,每次占空比改變0.025。
5、按鍵模塊介紹
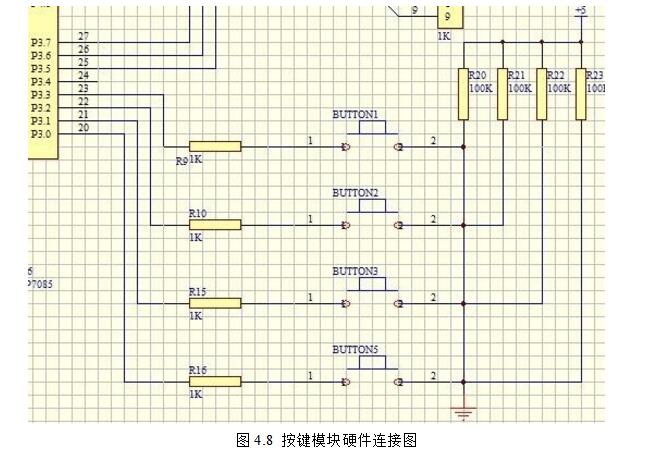
5.1按鍵模塊硬件設計
本設計采用1*4矩陣鍵盤實現(xiàn)對整個系統(tǒng)的操作,四按鍵一端分別通過1k的電阻與單片機的P3.0,P3.1,P3.2,P3.3接口連接,另一端通過100k的電阻與+5V電源連接。按鍵模塊連接如圖4.8。
5.2按鍵模塊軟件設計
本系統(tǒng)使用最簡單的1*4矩陣鍵盤實現(xiàn)對整個系統(tǒng)的操作。各鍵對應的功能和鍵值加圭4.1
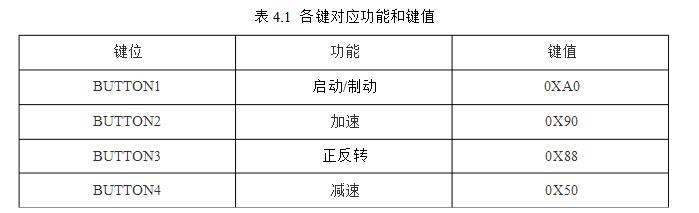
各鍵詳細功能如下:
BUTTON1:啟動系統(tǒng)。單片機上電初始化后,首先掃描鍵盤,若BUTTON1被按下,則啟動系統(tǒng),否則將一直掃描鍵盤,此時其他鍵沒有任何功能。BUTTON2和BUTTON4:通過按BUTTON4或BUTTON4,當前位閃爍,此時通過BUTTON2和BUTTON4可對當前位進行+1/-1,若2S內(nèi)沒有操作,系統(tǒng)自動確認當前輸入值。
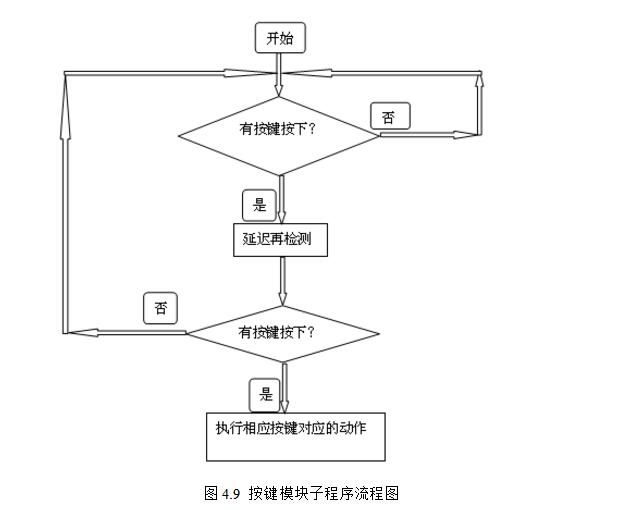
BUTTON3:正反轉(zhuǎn),實現(xiàn)電機機的反轉(zhuǎn)。按鍵模塊子程序流程圖如圖4.9
6、限流電路設計
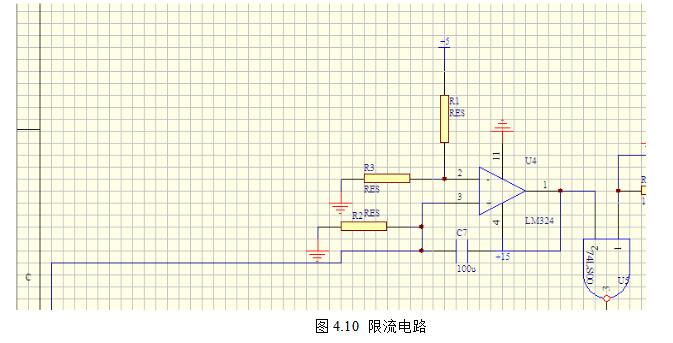
主回路中通過電動機的電流最終是經(jīng)過電阻R4接地。因此,U=R4IM:其大小正比于電動機的電流IMO而U{同數(shù)/模轉(zhuǎn)換器的輸出電壓UO分別送到LM324運算放大器的兩個輸入端,一旦反饋電壓Uf大于來自數(shù)/模轉(zhuǎn)換器的給定信號Uo,則LM324運算放大器輸出為低電平,通過非門變?yōu)楦唠娖捷斎氲絃M621的引腳17,使輸出關斷,從而截斷了直流無刷電動機定子繞組的所有電流通路,迫使電動機電流下降,一旦電流下降到時Uq小于Uo,則LM324運算放大器輸出回到高電平,通過非門變?yōu)榈碗娖剑覮M621的17腳,LM621正常工作。
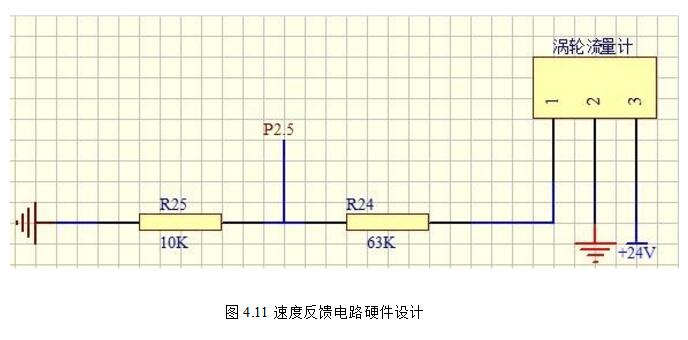
7、速度反饋電路設計
渦輪流量計采用24V直流供電,輸出24V脈沖信號經(jīng)過電阻分壓變?yōu)?.3V脈沖信號,與單片機P2.5口連接。電路硬件連接見圖4.11。渦輪流量計輸出的電壓脈沖信號與瞬時流量之間的計算公式為Q=3600xfk,通過采集流量反饋信號實現(xiàn)對流量的閉環(huán)精確控制。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論