 電子發燒友App
電子發燒友App


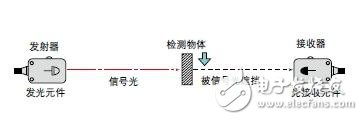
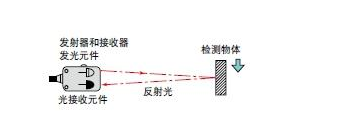
以“光”檢測的方式,光電傳感器將可見光線及紅外線等的“光”通過發射器進行發射,并通過接收器檢測由檢測物體反射的光或被遮擋的光量變化,從而獲得輸出信號。
原理和主要類型:由發射器的發光元件進行發光,并通過接收器的光接收元件進行接收。
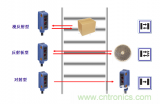
反射型:將發光元件和光接收元件內置于1 臺傳感器放大器中。接收來自檢測物體的反射光。

透過型:發射器/ 接收器處于分離狀態。如果在發射器/ 接收器之間放入檢測物體,則發射器的光會被遮擋。
回歸
反射型:將發光元件和光接收元件內置于1 臺傳感器放大器中。接收來自檢測物體的反射光。發光元件的光會通過反光板進行反射,并通過光接收元件進行接收。如果進入檢測物體,則會被遮擋。
特點:非接觸檢測
無需接觸檢測物體即可進行檢測,因此不會劃傷檢測物體。而且,也不會損傷傳感器本身,壽命較長,無需進行維護。
可檢測大多數物體:通過物體的表面反射或遮光量進行檢測,因此可檢測大
多數物體(玻璃、金屬、塑料、木料及液體等)。
檢測距離長:光電傳感器一般為高功率,因此可進行長距離檢測。
分類:
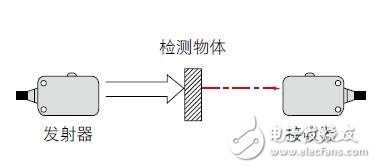
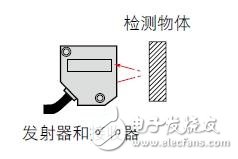
透過型
通過檢測物體遮擋對置的發射器和接收器之間的光軸來進行檢測。
? 檢測距離長。
? 檢測位置精度高。
? 若為不透明體,則與形狀、顏色和材質無關,可直接進行檢測。
? 抗鏡頭的臟污和灰塵。
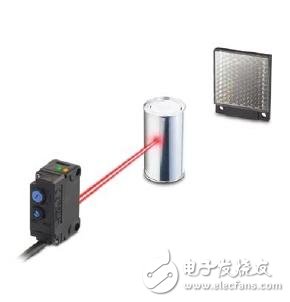
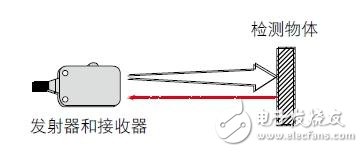
回歸反射型
通過檢測物體遮擋傳感器發射后由反光板返回的光來進行檢測。
? 由于單側為反光板,因此可安裝在狹小空間。
? 配線簡單,與反射型相比,可進行長距離檢測。
? 光軸調整非常容易。
? 若為不透明體,則與形狀、顏色和材質無關,可直接進行檢測。
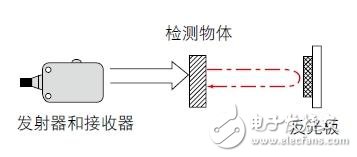
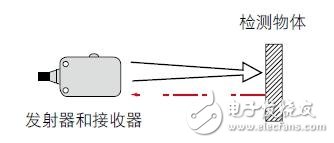
反射型
將光照射到檢測物體上,并接收來自檢測物體的反射光后進行檢測。
? 僅安裝傳感器本體即可,不占空間。
? 無需光軸調整。
? 若反射率較高,也可檢測透明體。
? 可辨別顏色。
窄光束反射型
在檢測物體上進行光斑照射,并接收來自檢測物體的反射光后進行檢測。
? 可檢測小型目標物。
? 可檢測標記。
? 可從機械等的空隙開始檢測。
? 檢測點可視。
限定反射型
采用以發射器和接收器為角度的結構,僅檢測各自光軸交叉的受限區域。
? 背景影響小。
? 應差距離短。
? 可檢測較小的凹凸。

距離設定型
將光斑照射到檢測物體上,并通過來自檢測物體反射光的角度差異進行檢測。
? 不受反射率較高的背景物影響。
? 即使檢測物體的顏色和材質的反射率不同,仍可進行穩定檢測。
? 可進行小物體的高精度檢測。

光澤度辨別用反射型
將光斑照射到檢測物體上,通過鏡面反射和漫反射的差異來檢測光澤度的不同。
? 可在線使用。
? 不受顏色的影響。
? 也可檢測透明體。
根據檢測環境和安裝位置,包括各種類型的光電傳感器。為您介紹代表性的分類軸,以便可選擇更符合環境的光電傳
感器。


二、以“光”檢測的方式:光纖傳感器
光纖傳感器可將光纖連接到光電傳感器的光源,并在自由安裝到狹窄位置等后進行檢測。
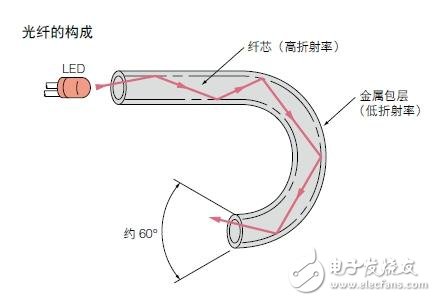
原理和主要類型
光纖如圖所示,由中心的纖芯和折射率不同的金屬包層構成。光線入射到纖芯時,會在與金屬包層的邊界面反復進行全反射的同時進入光線。穿過光纖內部,從端面發出的光會以約 60° 的角度進行擴散,并照射到檢測物體上。
此外,纖芯包括以下類型。
塑料型
纖芯為丙烯酸類樹脂,由0.1 至1 mm 直徑的單根或多根制作而成,被聚乙烯等材料包裹。
由于重量輕、低成本及不易彎曲等特性已成為光纖傳感器的主流。
玻璃型
由 10 至 100 _m 的玻璃光纖組成,并由不銹鋼管包覆。具有使用溫度較高(350℃)等特點。
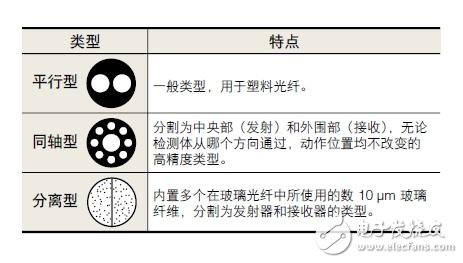
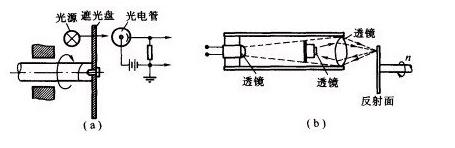
光纖傳感器大致分為透過型和反射型2 種檢測方法。透過型由發射器和接收器2 條構成。反射型從外觀來看好像是1 根,但從端面觀察,分為平行型、同軸型及分離型,如下圖所示。
特點:
不限安裝位置,自由度高
采用了柔韌光纖,可輕松安裝到機械的間隙或狹小空間內。
微小物體檢測
傳感器頭尖端非常小,可輕松檢測微小物體。
出色的環境抗耐性
只要使用耐熱型光纖元件,即使是在高溫場所仍可進行檢測。
分類:光纖元件包括非常多的類型。傳感器頭尖端部不設發射元件和光接收元件的檢測電路,因而對尺寸或外觀的限制較少。
以下為基恩士光纖元件FU 系列的分類示例。


解說選擇光纖元件時重要術語含義。
光纖長度
光纖元件的長度。長度越長,越可安裝在距光纖放大器較遠的位置。
環境溫度
可在該溫度范圍內使用光纖元件。當使用的環境溫度較高時,選擇耐熱型則最
為理想。
彎曲半徑
指在即使將光纖元件的半徑彎曲到多少mm 使用,仍可在滿足檢測距離性能
的同時進行無障礙使用。對于裝配較為困難的場所,這種半徑較小的機型則非
常適合。
檢測距離
可檢測的距離。檢測距離的數值越大,越可進行長距離檢測。
光軸直徑
主要為透過型光纖元件的指標。在透過型光纖元件中,可對光軸進行全遮光的
大小為標準檢測物體的大小。
最小可檢測物體
該光纖元件為可最大限度檢測的最小檢測物體的尺寸。
三、以“光”檢測的方式 激光傳感器“光強度”辨別型
概要:激光傳感器采用了發射元件所擁有直線度的“激光”。由于可觀察到光斑,因此在特定光軸調整或檢測位置時非常容易。此外,光不會發生擴散,因此無需擔心光的偏轉等即可進行安裝。
原理和主要類型
由發射器的發光元件(激光)進行發光,并通過接收器的光接收元件進行接收。

特點:可觀察到光斑,安裝輕松激光與LED 不同,由于直線度高,因此可立即了解光斑照射到何處。與光電傳感器等設備相比,可大幅削減安裝工時。
檢測距離長即使是長距離,由于是小光斑,因此無需擔心檢測距離即可進
行安裝。
小光斑精度高
由于為最小50 _m 的小光斑(基恩士產品線),因此也可準確
檢測較小的檢測物體。
也可在狹小間隙中使用
光不會發生擴散,因此不易導致光的偏轉,也支持狹小間隙。
四、以“光”檢測的方式 激光傳感器“位置”辨別型
概要; 該類型由發射器發射“激光”,并非光強度,并通過檢測光接收元件上的接收位置或反光時間來檢測目標物的位置信息。
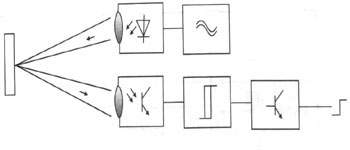
原理和主要類型
三角測量式
通過改變與目標物之間的距離來改變檢測元件CMOS 上所聚焦的位置。
使用該位置信息進行檢測。

如上圖所示,通過半導體激光將激光照射到目標物上。目標物的反射光會在受光鏡頭上聚焦,并成像在
光接收元件上。距離一旦變動,聚焦的反射光角度也會改變,光接收元件上的成像位置也隨之發生變化。
由于該光接收元件上的成像位置變化隨目標物的移動量而變化,因此可讀取成像位置的變化量,并作為
目標物的移動量進行測量。
時間測量式
在發光的激光照射到物體并返
回的時間內測量距離。不會影
響工件的表面狀態,可進行穩
定檢測。
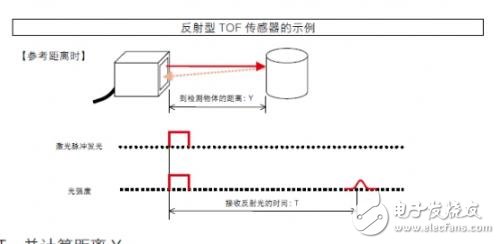
檢測上圖中接收激光反射光的時間T,并計算距離Y。
計算公式為 2Y(往返距離) = C(光速) × T(接收反射光的時間)。
來源;互聯網














 工商網監
工商網監
評論