計(jì)算系統(tǒng)的總誤差是一件需要些技巧的工作,特別是在技術(shù)規(guī)格的單位變化很大時(shí)更是如此。當(dāng)計(jì)算總體誤差時(shí),在合并前,所有技術(shù)規(guī)格必須被轉(zhuǎn)換為一個(gè)共同的單位。這篇博文將告訴你如何在伏特、百分率和百萬(wàn)
2018-04-17 09:05:01 11043
11043 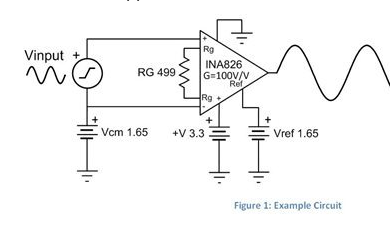
在講校準(zhǔn)之前,先介紹一下網(wǎng)絡(luò)分析儀的“系統(tǒng)誤差模型”。如果你去看各種論文或書(shū)籍,都喜歡給你下面這張圖,然后列一大堆公式,先把你搞暈,這個(gè)是傳統(tǒng)的10項(xiàng)誤差模型。也有文獻(xiàn)叫12項(xiàng)誤差模型,包含了2個(gè)isolation誤差項(xiàng),但是現(xiàn)代網(wǎng)分基本做得很好了,這個(gè)項(xiàng)可以忽略,故大部分都講10項(xiàng)誤差模型。
2023-08-25 09:48:13646 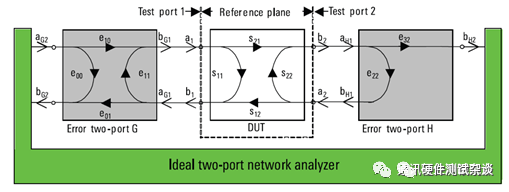
真實(shí)測(cè)量精度是隨機(jī)誤差和系統(tǒng)誤差的函數(shù)。隨機(jī)誤差是分辨率不確定度的來(lái)源,它包括量化誤差(在閘門(mén)時(shí)間窗內(nèi)圍繞最終計(jì)數(shù)的不確定度),觸發(fā)誤差(如在噪聲尖峰上觸發(fā))和時(shí)基的短
2011-10-24 14:55:505997 ,誤差定義為測(cè)量值和真實(shí)值之間的差。雖然可能出現(xiàn)的誤差的劃分方法不只一種,在這里將傳感器的誤差分為5個(gè)基本的類(lèi)別:插入、應(yīng)用、特性、動(dòng)態(tài)和環(huán)境誤差。 插入誤差(Insertion error)是當(dāng)系統(tǒng)中
2020-03-09 14:00:18
要求針對(duì)測(cè)量?jī)x表中傳感器測(cè)量存在的誤差情況,給出線性誤差自動(dòng)校準(zhǔn)的方法。(1)對(duì)傳感器線性誤差進(jìn)行分析。(2)提出基于硬件、軟件和兩者結(jié)合的三種校準(zhǔn)方法的研究。(3)對(duì)三種方法的優(yōu)缺點(diǎn)進(jìn)行對(duì)比總結(jié)。求助各位大神啊~~!!
2012-11-22 14:59:05
不變時(shí)有一恒定值,多次重復(fù)測(cè)量時(shí)其值固定不變,因而不具有抵償性,利用多次重復(fù)測(cè)量取算術(shù)平均值的辦法不能減小它對(duì)測(cè)量結(jié)果的影響,這是它與隨機(jī)誤差的重要差別。但當(dāng)測(cè)量條件改變時(shí),由于未定系統(tǒng)誤差的取值在某一
2021-03-22 16:34:40
系統(tǒng)誤差時(shí)的殘差隨某一測(cè)量條件變化的情況。當(dāng)系統(tǒng)誤差較小或隨機(jī)誤差較大時(shí),殘差表現(xiàn)出的規(guī)律不明顯,也就難以判斷。在這種情況下,常借助統(tǒng)計(jì)學(xué)的方法來(lái)判斷測(cè)量數(shù)據(jù)是否含有系統(tǒng)誤差。判別的方法雖有多種,但
2017-12-04 11:24:56
在電路中經(jīng)常遇到誤差放大器,該電路的原理是什么,如何實(shí)現(xiàn)其誤差放大功能的?對(duì)于具體的誤差放大器電路分析?
和差分放大器、比較器的區(qū)別是什么?
2024-01-26 21:53:10
1、這個(gè)傳感器輸出來(lái)的數(shù)據(jù)是經(jīng)過(guò)誤差補(bǔ)償?shù)膯幔窟€是需要使用者自己去寄存器中讀取數(shù)據(jù)進(jìn)行補(bǔ)償?
2、傳感器的標(biāo)定中的安裝誤差和與比例有關(guān)項(xiàng)的系數(shù)是不是需要使用者自己去測(cè)?
2024-01-02 08:01:36
通每個(gè)通道并消除每個(gè)通道的隨機(jī)誤差;然后根據(jù)校正過(guò)的0通道和1通道的數(shù)值,實(shí)時(shí)計(jì)算出誤差校正因子,依據(jù)誤差校正公式(1)實(shí)時(shí)校正零點(diǎn)漂移校準(zhǔn)和增益誤差,再根據(jù)測(cè)量得到傳感器的工作溫度,計(jì)算與標(biāo)準(zhǔn)溫度
2018-11-15 15:01:27
通每個(gè)通道并消除每個(gè)通道的隨機(jī)誤差;然后根據(jù)校正過(guò)的0通道和1通道的數(shù)值,實(shí)時(shí)計(jì)算出誤差校正因子,依據(jù)誤差校正公式(1)實(shí)時(shí)校正零點(diǎn)漂移校準(zhǔn)和增益誤差,再根據(jù)測(cè)量得到傳感器的工作溫度,計(jì)算與標(biāo)準(zhǔn)溫度
2018-11-01 17:15:10
IFR02型紅外雨量傳感器,關(guān)于降雨測(cè)量誤差如何調(diào)整?
2022-05-31 11:36:55
傳感器的融合處理。在進(jìn)行緊耦合之前,需要矯正imu的內(nèi)參,即標(biāo)定上述的imu誤差,提高位姿精度。其中軸偏角誤差,尺度因子,溫漂等屬于確定性誤差,我們通過(guò)imu_tk工具進(jìn)行標(biāo)定;噪聲及零偏屬于隨機(jī)誤差,我們通過(guò)imu_utils工具進(jìn)行標(biāo)定。
2020-12-24 15:56:31
我想請(qǐng)問(wèn)一下在處理數(shù)據(jù)的隨機(jī)誤差時(shí)計(jì)算極限誤差時(shí)已知置信概率在matlab中如何利用正太分布積分表求t希望大佬可以幫忙解答~萬(wàn)分感謝
2017-10-07 21:08:31
在單片機(jī)的數(shù)據(jù)采集系統(tǒng)中,測(cè)量通道串入隨機(jī)干擾是難免的,從而使A/D轉(zhuǎn)換送入單片機(jī)的數(shù)據(jù)存在誤差,這種因隨機(jī)干擾產(chǎn)生的誤差稱(chēng)為隨機(jī)誤差。隨機(jī)誤差雖然無(wú)法預(yù)測(cè),但多次測(cè)量結(jié)果是符合統(tǒng)計(jì)規(guī)律的。為克服
2019-07-08 06:08:56
在一單片機(jī)傳感器測(cè)量系統(tǒng)中,要解決傳感器溫度誤差補(bǔ)償問(wèn)題,首先要測(cè)出傳感器點(diǎn)的溫度,該溫度信號(hào)作為多路采樣開(kāi)關(guān)采集信號(hào)的一路送入單片機(jī)。測(cè)溫元件通常是安裝在傳感器內(nèi)靠近敏感元件的地方,用來(lái)測(cè)量傳感器
2013-05-02 10:35:09
壓力傳感器還有初始誤差?有幾個(gè)啊?有了解的朋友嘛?回答下,謝謝
2022-11-27 20:15:38
壓阻式傳感器為什么會(huì)產(chǎn)生溫度誤差?如何補(bǔ)償?
2021-06-18 08:01:57
壓阻式傳感器有哪些典型特點(diǎn)?壓阻式傳感器為什么會(huì)產(chǎn)生溫度誤差?如何補(bǔ)償?
2021-06-08 08:28:22
壓阻式傳感器的原理壓阻式傳感器的應(yīng)用壓阻式傳感器的典型特點(diǎn)是什么壓阻式傳感器為什么會(huì)產(chǎn)生溫度誤差?如何補(bǔ)償?
2021-03-18 06:10:32
正在將MEMS慣性測(cè)量單元(IMU)用于個(gè)人交通工具平臺(tái)的自平衡制導(dǎo)系統(tǒng),是否會(huì)有一款面向消費(fèi)者,能消除各傳感器之間的全部對(duì)齊誤差,并且所有核心傳感器元件都集成在單個(gè)芯片上的IMU?否,對(duì)于這個(gè)
2019-07-19 06:06:22
哪位大神可以幫忙下啊我要用LABVIEw做一個(gè)數(shù)據(jù)處理系統(tǒng) 要求算出數(shù)據(jù)的系統(tǒng)誤差 隨機(jī)誤差 和 粗大誤差哪個(gè)大神可以教教我啊小的不勝感激··比較急看到的好心人回復(fù)下吧
2014-05-28 15:58:06
基于Labview求傳感器靈敏度。線性度,遲滯誤差怎么做?
2014-05-11 12:24:44
` 巧用網(wǎng)絡(luò)分析儀的校準(zhǔn) 網(wǎng)絡(luò)分析儀校準(zhǔn)的目的是消除測(cè)試的系統(tǒng)誤差。校準(zhǔn)的思路是通過(guò)對(duì)標(biāo)準(zhǔn)件的測(cè)試得到網(wǎng)絡(luò)分析儀系統(tǒng)誤差項(xiàng)的具體數(shù)值,然后通過(guò)計(jì)算對(duì)被測(cè)件測(cè)試結(jié)果進(jìn)行修正處理,消除其中誤差成份
2018-04-19 11:45:34
一種基于AD598信號(hào)處理芯片的LVDT直線位移傳感器,并通過(guò)實(shí)例對(duì)其誤差和精度進(jìn)行探討。
2020-04-09 07:40:10
網(wǎng)絡(luò)分析儀校準(zhǔn)的目的是消除測(cè)試的系統(tǒng)誤差。校準(zhǔn)的思路是通過(guò)對(duì)標(biāo)準(zhǔn)件的測(cè)試得到網(wǎng)絡(luò)分析儀系統(tǒng)誤差項(xiàng)的具體數(shù)值,然后通過(guò)計(jì)算對(duì)被測(cè)件測(cè)試結(jié)果進(jìn)行修正處理,消除其中誤差成份,得到被測(cè)件真實(shí)值。
2019-08-12 07:41:15
計(jì)算系統(tǒng)的總誤差是一件需要些技巧的工作,特別是在技術(shù)規(guī)格的單位變化很大時(shí)更是如此。當(dāng)計(jì)算總體誤差時(shí),在合并前,所有技術(shù)規(guī)格必須被轉(zhuǎn)換為一個(gè)共同的單位。這篇博文將告訴你如何在伏特、百分率和百萬(wàn)分率
2018-09-11 14:49:48
包括DC漂移值、斜面的不正確或斜面的非線形。3、當(dāng)系統(tǒng)中插入一個(gè)拉繩位移傳感器時(shí),防水位移傳感器,由于改變了測(cè)量參數(shù)而產(chǎn)生的誤差,這種情況是在進(jìn)行電子測(cè)量時(shí)會(huì)出現(xiàn)這樣的問(wèn)題。濟(jì)南精量電子擁有
2019-11-26 14:55:53
`當(dāng)拉繩位移傳感器的精度受到外部干擾或者機(jī)械公差影響時(shí)就會(huì)造成誤差的增加,然而這些誤差會(huì)影響拉線繩位移傳感器的整體精度,如何解決這些誤差?面對(duì)誤差增加該怎么辦?下面濟(jì)南精量電子科技有限公司為大家分析
2019-12-27 15:55:14
多路復(fù)用系統(tǒng)誤差。電路結(jié)構(gòu)提供雙線式、三線式和四線式RTD 配置,其中,雙線式配置的器件成本最低,四線式器件精度最佳。三線式RTD 通常用 于工業(yè)應(yīng)用中,可采用兩個(gè)相同的電流源激勵(lì),以消除引腳電阻。與精密
2019-11-09 08:30:00
的物理性質(zhì)不相同時(shí),激發(fā)的特征譜線將不同,并且會(huì)發(fā)生系統(tǒng)誤差。??4.未知元素光譜線的重疊干擾。例如,在冶煉過(guò)程中添加脫氧劑和脫硫磷劑時(shí),會(huì)混入未知的合金元素,并會(huì)引入系統(tǒng)誤差。??5.為了消除系統(tǒng)錯(cuò)誤,必須嚴(yán)格遵守標(biāo)準(zhǔn)樣品制備的要求。為了檢查系統(tǒng)誤差,需要使用化學(xué)分析方法來(lái)分析多次校準(zhǔn)的結(jié)果。`
2020-10-30 14:40:59
發(fā)動(dòng)機(jī)機(jī),飛機(jī)翼面顫振問(wèn)題()0.2 測(cè)量誤差的分類(lèi)以及與測(cè)量精度的關(guān)系1)測(cè)量誤差的分類(lèi)① 系統(tǒng)誤差,關(guān)系:系統(tǒng)誤差的大小程度與測(cè)量的正確度有關(guān);② 隨機(jī)誤差,關(guān)系:隨機(jī)誤差的大小與測(cè)量的精密度有關(guān)
2018-04-19 10:39:19
位移傳感器是工業(yè)中不可缺少的設(shè)備,位移傳感器又稱(chēng)為線性傳感器,是一種屬于金屬感應(yīng)的線性器件,位移傳感器的作用是把各種被測(cè)物理量轉(zhuǎn)換為電量。那么如何檢測(cè)位移傳感器的誤差呢?以下是申思測(cè)控小編的分享:
2020-08-12 07:57:44
根據(jù)誤差的性質(zhì)不同,測(cè)量誤差分為系統(tǒng)誤差、偶然誤差和疏失誤差三類(lèi)。1、系統(tǒng)誤差系統(tǒng)誤差是指在相同的條件下,多次測(cè)量同一最值時(shí),誤差的絕對(duì)值和符號(hào)保持不變,或在條件改變時(shí)按一定規(guī)律變化的誤差。(1
2018-02-08 09:22:28
引入的不確定度分量”; 測(cè)量誤差按性質(zhì)可分為隨機(jī)誤差和系統(tǒng)誤差兩類(lèi),按定義隨機(jī)誤差和系統(tǒng)誤差都是無(wú)窮多次測(cè)量情況下的理想概念。&
2010-05-05 14:42:02
渦流傳感器和電容傳感器的原理區(qū)別是什么?
2015-07-19 09:42:32
熱電阻型溫度傳感器是利用金屬電阻隨溫度變化而設(shè)計(jì)的,用熱電阻來(lái)制作溫度傳感器主要是因?yàn)檩^高的穩(wěn)定性和精度,常用的熱電阻有鉑電阻和銅熱電阻。大多數(shù)金屬的電阻與溫度的關(guān)系式為: Rt=R0[1+
2011-07-07 00:20:31
的性質(zhì)及產(chǎn)生原因, 誤差可分為下面幾種:一、系統(tǒng)誤差的來(lái)源1.標(biāo)樣和試樣中的含量和化學(xué)組成不完全相同時(shí),可能引起基體線和分析線的強(qiáng)度改變,從而引入誤差。2.標(biāo)樣和試樣的物理性能不完全相同時(shí),激發(fā)的特征
2020-12-22 16:10:04
引言相控陣天線的數(shù)字波束形成技術(shù)具有多波束、靈活的波束控制和波束重構(gòu)等優(yōu)點(diǎn),但是陣列通道誤差的存在使得這些優(yōu)越性受到影響。相控陣天線系統(tǒng)的誤差可以分為兩類(lèi),即固定誤差和隨機(jī)誤差。固定誤差在制造安裝
2019-06-13 07:02:57
以達(dá)到精確測(cè)量的有效手段。 一、在使用矢量網(wǎng)絡(luò)分析儀E8362B進(jìn)行測(cè)試時(shí)會(huì)產(chǎn)生測(cè)量誤差。誤差包括系統(tǒng)誤差、隨機(jī)誤差和漂移誤差。測(cè)量前必須對(duì)測(cè)試系統(tǒng)進(jìn)行校準(zhǔn),以減小其系統(tǒng)誤差,提高測(cè)量精度。通常采用
2019-11-14 10:57:39
矢量網(wǎng)絡(luò)分析儀的誤差來(lái)源主要有以下三個(gè)方面:漂移誤差、隨機(jī)誤差、系統(tǒng)誤差 1、漂移誤差:是由于進(jìn)行校準(zhǔn)之后儀器或測(cè)試系統(tǒng)性能發(fā)生變化所引起,主要由溫度變化造成。2、隨機(jī)誤差:是不可預(yù)測(cè)的且不
2022-09-13 16:10:28
隨機(jī)誤差的合成形式包括標(biāo)準(zhǔn)差合成和極限誤差合成。 01、標(biāo)準(zhǔn)差合成 合成標(biāo)準(zhǔn)差表達(dá)式: q個(gè)單項(xiàng)隨機(jī)誤差,標(biāo)準(zhǔn)差 ; 誤差傳播系數(shù) 若各個(gè)誤差互不相關(guān),即相關(guān)系數(shù)
2021-03-22 16:36:39
在測(cè)量系統(tǒng)中,傳感器的非線性特性是測(cè)量系統(tǒng)誤差的主要來(lái)源。要提高測(cè)量系統(tǒng)的精度,就必須進(jìn)行誤差補(bǔ)償。設(shè)計(jì)了一個(gè)用模糊小腦神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)的補(bǔ)償環(huán)節(jié)。該補(bǔ)償環(huán)節(jié)是一
2009-03-14 18:27:01 11
11 介紹了用神經(jīng)網(wǎng)絡(luò)校正傳感器系統(tǒng)非線性誤差的原理和方法,提出了基于BP 神經(jīng)網(wǎng)絡(luò)傳感器非線性誤差校正及其模型、算法與實(shí)現(xiàn)技術(shù)。通過(guò)計(jì)算機(jī)仿真與應(yīng)用,顯示出這種逆模型不但
2009-06-29 10:22:0612 詳細(xì)推導(dǎo)并統(tǒng)一了形狀誤差和誤差運(yùn)動(dòng)高精度檢測(cè)2分離技術(shù)中各類(lèi)傳感器的讀數(shù)方程,包括傳統(tǒng)的差動(dòng)變壓器式位移傳感器、電渦流式位移傳感器、電容式微位移傳感器和近年來(lái)出
2009-07-11 10:38:3817 含有多傳感器的微機(jī)電系統(tǒng)在組裝傳感器時(shí), 一般存在著軸對(duì)準(zhǔn)問(wèn)題, 軸的非對(duì)準(zhǔn)誤差能導(dǎo)致很大的系統(tǒng)測(cè)量誤差。為此提出一種基于光對(duì)準(zhǔn)的誤差補(bǔ)償方法, 可以在不需要高精度軸
2009-07-11 11:19:5418 為提高傳感器的準(zhǔn)確度,減少傳感器的研制成本,提出了基于神經(jīng)網(wǎng)絡(luò)多傳感器誤差補(bǔ)償?shù)姆椒āT摲椒ɡ肂P 網(wǎng)絡(luò)較強(qiáng)的非線性映射能力,網(wǎng)絡(luò)通過(guò)學(xué)習(xí)能實(shí)現(xiàn)對(duì)傳感器系統(tǒng)誤差的補(bǔ)
2009-07-13 10:31:028 在閉合導(dǎo)線測(cè)量中,導(dǎo)線邊如果存在系統(tǒng)誤差, 解算結(jié)果仍可能滿(mǎn)足現(xiàn)行規(guī)范中的各項(xiàng)精度指標(biāo)。通過(guò)一項(xiàng)邊長(zhǎng)接近的閉合導(dǎo)線測(cè)量實(shí)例,分析了產(chǎn)生誤差的原因 對(duì)策,解算出
2010-10-14 16:18:5017 在相同的觀測(cè)條件下,對(duì)某一量進(jìn)行一系列測(cè)量,如果測(cè)量誤差在大小和符號(hào)上呈現(xiàn)一致性,即按一定的規(guī)律變化或保持為常數(shù),這種誤差稱(chēng)之為系統(tǒng)誤差。系統(tǒng)誤差具有積累性
2010-10-22 16:23:3215 誤差從性質(zhì)上分類(lèi)、特點(diǎn) 誤差從性質(zhì)上可分為三大類(lèi),即:系統(tǒng)誤差 隨機(jī)(偶然)誤差 疏失誤差(粗大誤差、過(guò)失誤差)
2008-09-18 01:12:5711847 系統(tǒng)誤差的分類(lèi)
系統(tǒng)誤差按照它服從的規(guī)律 . 可以分成以下兩種類(lèi)型:
1、 恒定系統(tǒng)誤差 ( 又稱(chēng)固定系統(tǒng)誤差或定值系統(tǒng)誤差 ) . 它的特點(diǎn)是在
2008-11-24 15:46:5811493 
傳感器非線性誤差的補(bǔ)償電路
2009-04-26 15:59:211034 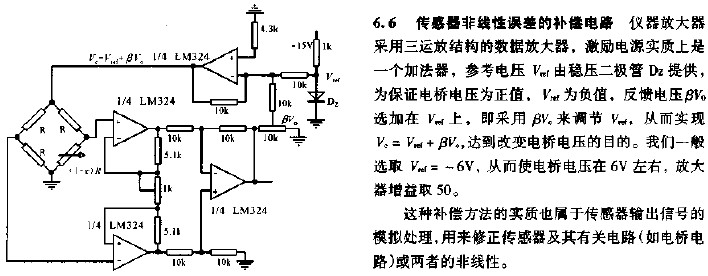
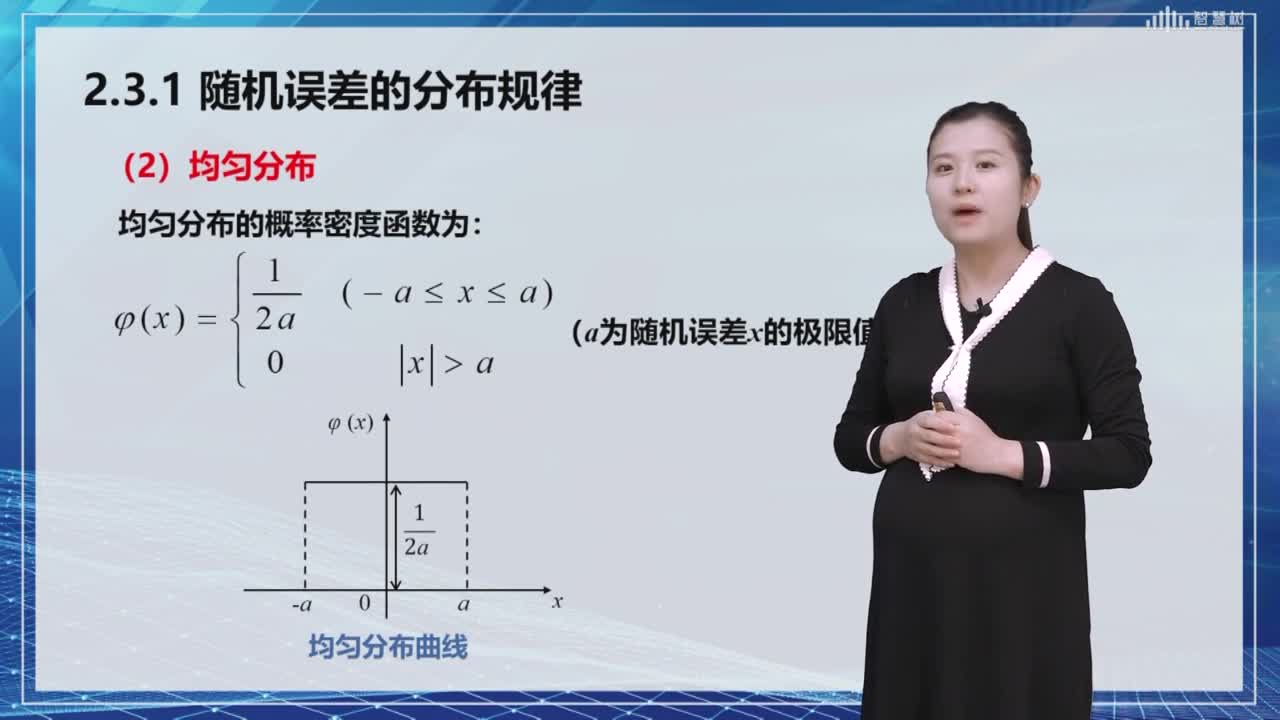
3.1 誤差的概念與分類(lèi) 3.1.1 測(cè)量誤差的概念及表達(dá)式 3.1.2 測(cè)量誤差的分析 3.2 隨機(jī)誤差的處理 3.2.1 隨機(jī)誤差的概率分布 3.2.2 被測(cè)量真值和測(cè)量方差的估計(jì)值 3.2.3 測(cè)量結(jié)果的置信度與表示方法 3.3 系統(tǒng)誤差的處理 3.3.1 系統(tǒng)誤差的分類(lèi) 3.3.2 判斷系統(tǒng)誤
2011-03-13 20:19:090 光纖陀螺 漂移具有弱非線性和弱時(shí)變的特點(diǎn)。為了更準(zhǔn)確的描述這種特性,介紹了非平穩(wěn)時(shí)間序列的DDS建模方法,并對(duì)光纖陀螺隨機(jī)誤差進(jìn)行建模。通過(guò)對(duì)建模結(jié)果的脈沖響應(yīng)分析,表
2011-06-08 15:25:1525 針對(duì)測(cè)量船伺服系統(tǒng)存在隨機(jī)誤差的情況,為提高角誤差的精度,基于著名的Singer模型建立了航天測(cè)量船伺服系統(tǒng)卡爾曼濾波算法,并通過(guò)計(jì)算機(jī)進(jìn)行了實(shí)際測(cè)量數(shù)據(jù)的仿真實(shí)驗(yàn)。從實(shí)
2013-06-25 16:31:4132 本文針對(duì)半閉環(huán)伺服壓裝系統(tǒng)的誤差特點(diǎn),設(shè)計(jì)使用剛性塊作為輔助裝置進(jìn)行誤差標(biāo)定,并通過(guò)最小二乘法擬合和誤差表格插值,實(shí)現(xiàn)誤差的補(bǔ)償。經(jīng)過(guò)對(duì)隨機(jī)選取的實(shí)際生產(chǎn)數(shù)據(jù)進(jìn)行誤差補(bǔ)償并與數(shù)顯千分表實(shí)測(cè)值進(jìn)行對(duì)比分析后得,補(bǔ)償后的誤差可以控制在1%左右,極大地提高了零部件壓裝合格判定的準(zhǔn)確度。
2015-12-24 16:05:2512 線陣CCD傳感器成像誤差模型分析....
2016-01-06 11:41:3929 基于Allan噪聲模型的隨機(jī)誤差濾波器設(shè)計(jì)_施建禮
2017-01-18 20:23:581 基于九軸MEMS定位系統(tǒng)誤差分析與補(bǔ)償算法研究_張港
2017-03-19 19:28:034 計(jì)算系統(tǒng)的總誤差是一件需要些技巧的工作,特別是在技術(shù)規(guī)格的單位變化很大時(shí)更是如此。當(dāng)計(jì)算總體誤差時(shí),在合并前,所有技術(shù)規(guī)格必須被轉(zhuǎn)換為一個(gè)共同的單位。這篇博文將告訴你如何在伏特、百分率和百萬(wàn)
2017-04-17 20:58:321386 
本文檔內(nèi)容介紹了全誤差帶在傳感器的選擇,供網(wǎng)友參考。
2017-09-14 14:31:283 傳感器的精度就是指測(cè)量結(jié)果的可靠程度,它以給定的準(zhǔn)確度表示重復(fù)某個(gè)讀數(shù)的能力,誤差愈小,則傳感器的精度越高。 傳感器的精度由其量程范圍內(nèi)的最大基本誤差與滿(mǎn)量程之比的百分?jǐn)?shù)表示。基本誤差是由系統(tǒng)誤差
2017-09-18 09:21:581 針對(duì)用于激光焊接的關(guān)節(jié)型工業(yè)機(jī)器人運(yùn)動(dòng)誤差控制問(wèn)題,根據(jù)關(guān)節(jié)型工業(yè)機(jī)器人伺服控制和運(yùn)動(dòng)學(xué)原理,分析了機(jī)器人運(yùn)動(dòng)誤差的積累過(guò)程,并對(duì)運(yùn)動(dòng)誤差和伺服系統(tǒng)誤差分別進(jìn)行了測(cè)量和比較。結(jié)果表明,伺服系統(tǒng)誤差是運(yùn)動(dòng)誤差的重要組成部分。該結(jié)論對(duì)機(jī)器人激光焊接的路徑控制具有一定參考意義。
2017-10-12 18:19:066 引言 相控陣天線的數(shù)字波束形成技術(shù)具有多波束、靈活的波束控制和波束重構(gòu)等優(yōu)點(diǎn),但是陣列通道誤 差的存在使得這些優(yōu)越性受到影響。相控陣天線系統(tǒng)的誤差可以分為兩類(lèi),即固定誤差和隨機(jī)誤差。固定誤差在制造
2017-11-18 10:55:282 進(jìn)行數(shù)據(jù)采集時(shí),會(huì)遇到數(shù)據(jù)的隨機(jī)誤差,隨機(jī)誤差是由隨機(jī)干擾引起的,其特點(diǎn)是在相同條件下測(cè)量同一量時(shí),其大小和符號(hào)會(huì)現(xiàn)無(wú)規(guī)則的變化而無(wú)法預(yù)測(cè),但多次測(cè)量的結(jié)果符合統(tǒng)計(jì)規(guī)律。
2018-07-03 09:51:002338 的雷達(dá)系統(tǒng)誤差分離方法。通過(guò)處理某飛行任務(wù)的大量測(cè)量數(shù)據(jù),估算出了不同航路的雷達(dá)動(dòng)態(tài)測(cè)距、測(cè)角系統(tǒng)誤差和隨機(jī)誤差。結(jié)果表明雷達(dá)測(cè)距系統(tǒng)誤差與斜距成正比;測(cè)角系統(tǒng)誤差為設(shè)計(jì)指標(biāo)的2倍多;其隨機(jī)誤差與設(shè)計(jì)指標(biāo)相符。
2018-03-06 11:44:000 而傾角傳感器的分辨率則與精度沒(méi)有任何關(guān)系,所以不可以計(jì)入到精度指標(biāo)內(nèi)。由此,衡量?jī)A角傳感器的測(cè)量精度,絕不能僅以非線性來(lái)衡量,需要將傳感器的系統(tǒng)誤差和隨機(jī)誤差實(shí)施誤差合成后方可。在常溫下,傾角傳感器
2018-07-31 09:17:001277 空偏置誤差只是慣性傳感器偏離零時(shí)的誤差正在經(jīng)歷無(wú)刺激 - 加速度計(jì)為零g或陀螺儀無(wú)旋轉(zhuǎn)。通常,所有傳感器都表現(xiàn)出至少兩種形式的零偏差誤差:初始零偏差誤差和由于溫度引起的零偏差誤差。
2019-04-10 10:04:113554 系統(tǒng)誤差,指的就是測(cè)量器具或方法引起的有規(guī)律的誤差,體現(xiàn)為與真值之間的偏差,如儀器零點(diǎn)誤差,經(jīng)年變化誤差,溫度、電磁場(chǎng)等環(huán)境條件引起的誤差,動(dòng)力源引起的誤差等。這種誤差的值和符號(hào)保持不變,或測(cè)量條件
2019-07-01 16:25:17751 精密度(precision of measurement)系指在相同條件下,對(duì)被測(cè)量進(jìn)行多次反復(fù)測(cè)量,測(cè)得值之間的一致(符合)程度。從測(cè)量誤差的角度來(lái)說(shuō),精密度所反映的是測(cè)得值的隨機(jī)誤差。精密度高,不一定正確度高。也就是說(shuō),測(cè)得值的隨機(jī)誤差小,不一定其系統(tǒng)誤差亦小。
2019-08-28 16:54:245334 根據(jù)測(cè)量誤差的性質(zhì)(或出現(xiàn)的規(guī)律),產(chǎn)生的原因,測(cè)量誤差可分為系統(tǒng)誤差、隨機(jī)誤差和粗大誤差三類(lèi)。
2019-11-02 06:12:0067670 在測(cè)定之前,要求檢測(cè)人員在檢測(cè)過(guò)程中可能產(chǎn)生的系統(tǒng)誤差進(jìn)行認(rèn)真的分析,必須盡可能預(yù)見(jiàn)一切可能產(chǎn)生系統(tǒng)誤差的來(lái)源,并設(shè)法消除或盡量減弱其影響。
2019-11-10 07:33:0022578 任何測(cè)量的設(shè)備都會(huì)或多或少的產(chǎn)生些無(wú)可避免的誤差,像其他的設(shè)備一樣,傳感器也會(huì)出現(xiàn)誤差。為了維持一致性,誤差定義為測(cè)量值和真實(shí)值之間的差。
2019-11-29 16:04:554382 本文介紹了一個(gè)以單片機(jī)為核心的鉑電阻測(cè)溫儀器, 說(shuō)明了儀器的結(jié)構(gòu)和工作原理,分析了儀器的誤差來(lái)源。并對(duì)系統(tǒng)誤差、隨機(jī)誤差進(jìn)行軟件修正, 使儀器最終達(dá)到較高的精確度。
2020-03-09 16:59:287 一、按誤差出現(xiàn)的規(guī)律分類(lèi):按誤差出現(xiàn)的規(guī)律,誤差可分為系統(tǒng)誤差、 隨機(jī)誤差和粗大誤差三類(lèi)。
2020-03-11 08:00:001 傾角傳感器的精度和線性誤差的區(qū)別 靈敏度誤差:取決于核心敏感器件的自身特性,但同時(shí)與頻率響應(yīng)關(guān)聯(lián),也稱(chēng)幅頻特性。經(jīng)過(guò)實(shí)際的測(cè)試對(duì)靈敏度的影響很小可以忽略不計(jì)。 零點(diǎn)偏置:取決于核心敏感器件的自身特性
2020-04-16 17:03:372236 相控陣天線的數(shù)字波束形成技術(shù)具有多波束、靈活的波束控制和波束重構(gòu)等優(yōu)點(diǎn),但是陣列通道誤差的存在使得這些優(yōu)越性受到影響。相控陣天線系統(tǒng)的誤差可以分為兩類(lèi),即固定誤差和隨機(jī)誤差。固定誤差在制造安裝時(shí)產(chǎn)生
2020-08-25 18:50:001 在選擇壓力傳感器的時(shí)候我們要考慮他的綜合精度,而壓力傳感器的精度受哪些方面的影響呢?其實(shí)造成傳感器誤差的因素有很多,下面我們主要說(shuō)四個(gè)無(wú)法避免的誤差,這也叫傳感器的初始誤差。
2020-08-14 15:58:4814714 
之前為大家講解過(guò)壓力傳感器模塊有四種初始誤差:靈敏度誤差、偏移量誤差、滯后誤差以及線性誤差。那遲滯性誤差出現(xiàn)的原因有哪些?接下來(lái)通程創(chuàng)品就來(lái)為大家揭曉答案!
2022-08-11 08:55:042697 矢量網(wǎng)絡(luò)分析儀的誤差來(lái)源主要有以下三個(gè)方面:漂移誤差、隨機(jī)誤差、系統(tǒng)誤差。
2022-09-13 16:08:321193 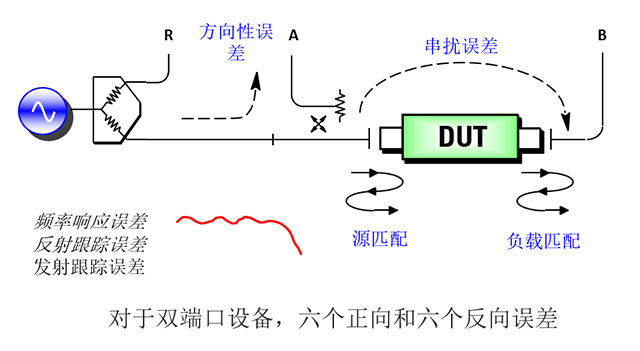
矢量網(wǎng)絡(luò)分析儀的誤差來(lái)源主要有以下三個(gè)方面:漂移誤差、隨機(jī)誤差、系統(tǒng)誤差 1、漂移誤差:是由于進(jìn)行校準(zhǔn)之后儀器或測(cè)試系統(tǒng)性能發(fā)生變化所引起,主要由溫度變化造成。 2、隨機(jī)誤差:是不可預(yù)測(cè)的且不
2023-01-05 15:20:08339 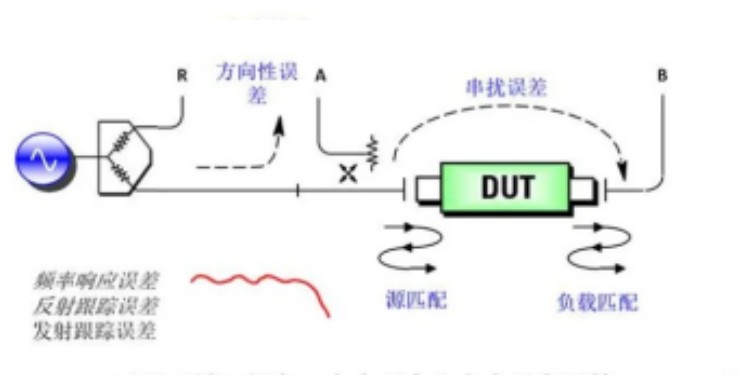
誤差補(bǔ)償技術(shù)分為硬件補(bǔ)償和軟件補(bǔ)償。其中,硬件補(bǔ)償主要是通過(guò)機(jī)床的機(jī)械結(jié)構(gòu)進(jìn)行調(diào)整,減少機(jī)械上的誤差,如制作校正尺補(bǔ)償螺距誤差、制作凸輪校正傳動(dòng)鏈誤差等。硬件補(bǔ)償不適用于隨機(jī)誤差且缺乏柔性。軟件補(bǔ)償是指通過(guò)計(jì)算機(jī)對(duì)所建立的數(shù)學(xué)模型進(jìn)行運(yùn)算后,發(fā)出運(yùn)動(dòng)補(bǔ)償指令,由數(shù)控伺服系統(tǒng)完成誤差補(bǔ)償動(dòng)作。
2023-02-08 11:42:442769 
矢量網(wǎng)絡(luò)分析儀的誤差來(lái)源主要有以下三個(gè)方面:漂移誤差、隨機(jī)誤差、系統(tǒng)誤差1、漂移誤差:是由于進(jìn)行校準(zhǔn)之后儀器或測(cè)試系統(tǒng)性能發(fā)生變化所引起,主要由溫度變化造成。2、隨機(jī)誤差:是不可預(yù)測(cè)的且不能通過(guò)校準(zhǔn)
2022-09-14 09:48:38420 
霍爾效應(yīng)實(shí)驗(yàn)是一個(gè)受系統(tǒng)誤差影響較大的實(shí)驗(yàn),特別是在霍爾效應(yīng)產(chǎn)生的同時(shí),伴隨產(chǎn)生的其他效應(yīng)引起的附加電場(chǎng)對(duì)實(shí)驗(yàn)影響較大。霍爾效應(yīng)產(chǎn)生誤差的原因主要有以下幾點(diǎn):
2023-07-03 17:17:042566 漂移誤差、隨機(jī)誤差、系統(tǒng)誤差這三種誤差到底是怎么引發(fā)的?如何對(duì)矢量網(wǎng)絡(luò)分析儀校準(zhǔn)呢? 漂移誤差、隨機(jī)誤差和系統(tǒng)誤差是在矢量網(wǎng)絡(luò)分析儀(簡(jiǎn)稱(chēng)VNA)測(cè)量過(guò)程中可能出現(xiàn)的三種誤差類(lèi)型。它們的引發(fā)原因和解
2024-01-19 15:42:16203
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論