 電子發燒友App
電子發燒友App


車輛中使用的傳感器種類繁多,從溫度和觸摸傳感器到加速度計和陀螺儀。本文著眼于在具有擴展溫度范圍和更高電壓保護的中將傳感器連接到有線網絡(例如 LIN、CAN 和以太網)的問題。
現代汽車網絡將協議組合用于不同的應用。車輛周圍的傳感器越來越多地用于各種應用——從用于攝像頭的圖像傳感器到用于加熱和乘客識別的溫度傳感器——意味著不同的傳感器必須連接到不同的網絡。
本地互連網絡 (LIN) 用于低成本應用,主要用于數據速率通常為 10 至 20 kbit/s 的車身電子設備,而控制器局域網 (CAN) 用于高達 10 Mbit/s 的主流動力系統和車身通信s。FlexRay 總線用于高級系統(如主動懸架)中的高速同步數據通信。MOST 總線被一些車輛設計人員用于以 50 到 100 Mbit/s 傳輸音頻甚至視頻的更高性能網絡,盡管汽車中也正在開發 100 Mbit/s 以太網網絡來傳輸此類數據。
傳感器要測量的一個關鍵參數是溫度,因為它可以以多種不同方式用于提供重要信息。使用數據的方式,即使是相同類型的傳感器,也需要不同的總線接口。例如,Melexis MLX90620 等紅外溫度傳感器可用作汽車空調控制系統中的“熱舒適”傳感器,但它也可用于乘客分類,甚至用于盲角檢測。所有這些應用程序都將連接到具有不同設計要求的車輛中的不同有線網絡。
當車廂內濕度高、前擋風玻璃溫度低時,水汽會凝結在玻璃上,導致駕駛員視線模糊。HVAC 系統可以通過在擋風玻璃上吹干熱空氣來避免這種冷凝。為此,系統必須能夠檢測到冷凝,甚至更好地進行預測。這可以使用紅外溫度計、濕度傳感器和外部溫度計來完成。
該傳感器還可用于確定座位上是否有乘客,啟用或禁用安全氣囊。紅外傳感器甚至可以用于盲點檢測。一個系統使用被動紅外傳感器來感應從移動車輛的輪胎輻射的熱能。該溫差用于觸發閃爍的紅燈,以警告駕駛員危險。
紅外溫度傳感被用作測量體溫的更準確和更具成本效益的替代方案。IR 模塊不是測量空氣樣本,而是直接測量體溫。它的數字傳感器接口還避免了可靠性和設計復雜性問題。
小尺寸、低成本的 16 x 4 像素 IR 陣列易于與行業標準的四引線 TO-39 封裝集成。出廠校準的紅外溫度測量參數存儲在 EEPROM 中,該器件可以在 4 Hz 刷新率下提供 0.25K rms 的噪聲等效溫差 (NETD)。它采用 2.6 V 電源供電,工作溫度范圍為 -40 至 85°C。
它在一個封裝中包含兩個芯片:帶有信號調節電子器件的 MLX90670 IR 陣列和 24AA02 (256 x 8 EEPROM) 芯片。MLX90620 包含 64 個 IR 像素,并集成了專用的低噪聲斬波穩定放大器和快速 ADC。集成了一個與絕對溫度成比例的傳感器 (PTAT),用于測量芯片的環境溫度。IR 和 PTAT 傳感器的輸出都存儲在內部 RAM 中,并可通過 I2C 訪問。
紅外傳感器測量的結果存儲在 RAM 中,每個傳感器的 16 位紅外測量結果(64 個字)和 PTAT 傳感器的 16 位結果。根據應用的不同,外部微控制器可以讀取不同的 RAM 數據,并根據存儲在 EEPROM 存儲器中的校準數據,補償傳感器之間的差異以建立熱圖像,或計算成像場景中每個點的溫度。 這些常數可由用戶微控制器通過 I2C 總線訪問,并且必須用于熱數據的外部后處理。結果是 NETD 在 1 Hz 刷新率下優于 0.08K rms 的圖像。
陣列的刷新率可通過寄存器設置或直接通過 I2C 命令進行編程。刷新率的變化對積分時間和噪聲帶寬有直接影響,因為更快的刷新率意味著更高的噪聲水平,因此幀率在 0.5 Hz 至 12 Hz 范圍內可編程,并且可以更改以實現所需的交易在速度和準確性之間徘徊。MLX90620 需要一個 3 V 單電源 (±0.6 V),盡管該器件經過校準并且在 VDD=2.6 V 時性能最佳。
對于應用設計人員來說,了解溫度測量的精度對傳感器封裝沒有溫差時的熱平衡條件非常敏感,這一點非常重要。溫度計的精度可能會受到封裝內溫度差異的影響,這些溫度差異是由傳感器后面的熱電子器件、傳感器后面或旁邊的加熱器/冷卻器或非常靠近傳感器的熱/冷物體引起的,這些物體不僅加熱溫度計中的傳感元件以及溫度計封裝。
這種效應對于具有小 FOV 的溫度計尤其重要,因為傳感器從物體接收到的能量會減少。IR 傳感器天生就容易受到由熱梯度引起的誤差的影響。這些現象是有物理原因的,盡管 MLX90620 進行了精心設計,但建議不要讓設備受到熱傳遞,尤其是瞬態條件。
I2C 上的容性負載會降低通信性能。通過在上拉電路中使用電流源而不是電阻器可以進行一些改進,并且可以使用專門的總線加速器進行進一步的改進。使用 MLX90620,可以通過增加上拉電流(減小上拉電阻值)來進一步改進。I2C 兼容模式的輸入電平具有比 I2C 規格更高的整體容差,但即使采用高功率 I2C 規格的上拉電流,輸出低電平也相當低。另一種選擇可能是采用較慢的通信(時鐘速度),因為 MLX90620 在 I2C 兼容模式下對其輸入實施施密特觸發器。因此,它對總線的上升時間并不敏感(上升時間比下降時間更有可能成為問題,因為 I2C 系統是開漏帶上拉的)。這種較慢的時鐘頻率意味著 LIN 總線是將溫度傳感器連接到電子控制單元的理想方式。
LIN/SAE J2602 是一種基于通用異步收發器 (UART) 的單主多從網絡架構,最初是為汽車傳感器和執行器網絡應用而開發的,并為連接電機、開關、傳感器提供了一種經濟高效的網絡選項和車內的燈。LIN 主節點通??過將 LIN 與更高級別的網絡(例如 CAN)連接,將車載網絡的通信優勢一直延伸到各個傳感器和執行器。
LIN 總線的開發旨在為汽車網絡中的低成本、低端多路復用通信創建標準。盡管 CAN 總線滿足了對高帶寬、高級錯誤處理網絡的需求,但 CAN 實現的硬件和軟件成本對于傳感器等性能較低的設備來說已經變得過高。LIN 在不需要 CAN 的帶寬和多功能性的應用中提供具有成本效益的通信。LIN 可以使用嵌入到大多數現代低成本 8 位微控制器(例如Microchip PIC18 )中的標準串行通用異步接收器/發送器 (UART) 輕松實現,盡管也有專用的 LIN 接口設備。
LIN 總線采用主/從方法,包括一個 LIN 主設備和一個或多個 LIN 從設備。消息頭由用于標識幀開始的中斷和從節點用于時鐘同步的同步字段組成。標識符 (ID) 由 6 位消息 ID 和 2 位奇偶校驗字段組成,ID 表示特定的消息地址,但不表示目的地。在接收和解釋 ID 后,一個從機開始消息響應,該響應由 1 到 8 個字節的數據和一個 8 位校驗和組成。
主站控制消息幀的順序,這在一個時間表中是固定的。這可以根據需要進行更改。LIN 標準有多個版本。1.3 版完成了字節層通信。2.0 和 2.1 版本增加了更多的消息傳遞規范和服務,但在字節級別與 LIN 1.3 兼容。
飛思卡爾半導體的8 引腳MC33662是專用于 LIN 協議規范 1.3、2.0、2.1 和 SAEJ2602-2 的汽車 LIN 子總線應用的物理層組件。部件號選擇定義了工作波特率(33662L 或 33662S 用于 20 kB/s,33662J 用于 10 kB/s 網絡)。兩者都集成了用于測試和編程模式的快速波特率 (10 kB/s),并提供電磁兼容性 (EMC) 和輻射發射性能、靜電放電 (ESD) 穩健性以及在 TXD 接地短路情況下所需的安全行為在汽車設計中。
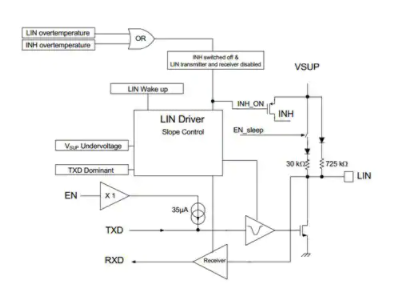
圖 :將飛思卡爾的 MC33662 接口連接到 LIN 網絡。
MC33662 在 7.0 至 18 V DC 的電源電壓下運行,工作電壓高達 27 V DC,并在負載突降期間處理 40 V,因此它可以直接從車輛的電源軌供電,但支持 5.0 V 和 3.3 V 兼容數字無需任何所需外部元件的輸入;本地和遠程喚醒能力由 RXD 引腳報告。
LIN 驅動器是具有內部過流熱關斷功能的低側 MOSFET。集成了具有串聯二極管結構的內部上拉電阻,因此從節點中的應用無需外部上拉元件。一旦器件進入正常模式,LIN 發送器將能夠發送第一個顯性位,并且接收器將被啟用。
同樣,邁來芯TH8080是一種用于單線數據鏈路的物理層設備,能夠在不需要高數據速率的應用中運行,而較低的數據速率可以降低物理媒體組件和使用網絡的微處理器的成本。
由于 TH8080 在隱性狀態下的電流消耗非常低,因此它適用于對待機電流有嚴格要求的 ECU 應用,因此不需要微處理器的睡眠/喚醒控制。
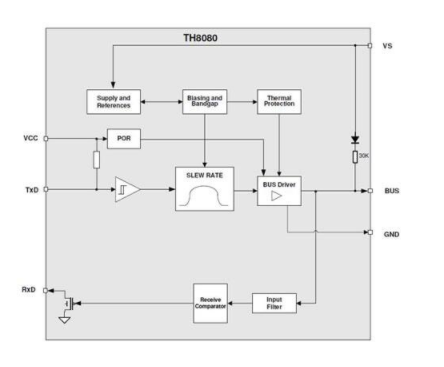
圖 :控制 Melexis TH8080 LIN 接口收發器。
收發器由一個具有轉換速率控制、電流限制的總線驅動器以及接收器中的一個高壓比較器和一個去抖動單元組成。隱性總線電平由與二極管串聯的集成 30 kΩ 上拉電阻產生。該二極管可防止 VBUS 在 VS 和 BUS 之間的電壓差(VBUS》VS)期間出現反向電流。在 LIN 從節點中使用 TH8080 無需額外的終端電阻。如果該 IC 用于 LIN 主節點,則 BUS 引腳必須通過與 VBAT 二極管串聯的外部 1 kΩ 電阻端接。
對于更高的集成度,STMicroelectronics 的SPC560P44等器件將 FlexRay、CAN 和 LIN 控制器組合在一個芯片中,該芯片可用作具有靈活交叉開關和模數轉換器塊的 PowerPC 內核的多種功能的集線器。這也可以作為 ECU 設備來集成來自 LIN 和 CAN 上的多個傳感器的數據。
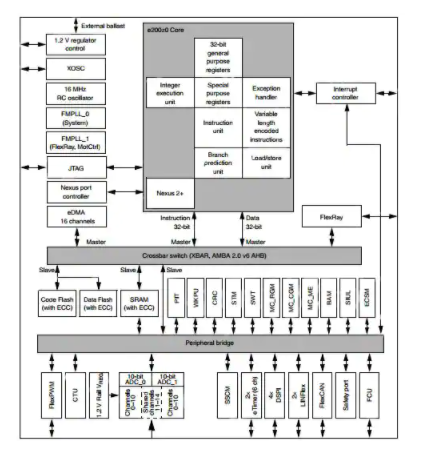
圖 :SPC560P44 將 CAN、LIN 和 FlexRay 接口結合在一個設備中。
FlexCAN 接口塊用作根據博世規范 2.0B 版實現 CAN 協議的通信控制器。CAN 協議主要用作車輛串行數據總線,滿足該領域的特定要求:實時處理、車輛 EMI 環境中的可靠運行、成本效益和所需帶寬,支持 32 個消息緩沖區。 第二個 CAN 控制器以高比特率運行,用作安全端口。安全端口 CAN 模塊使用 CAN 模塊之間的直接連接,在 60 MHz CPU 時鐘下提供高達 7.5 Mbit/s 的比特率,因此無需物理收發器。
LIN 網絡更適合傳感器的需求。SPC560P44 中的 LINflex 接口可作為主機或從機,以最小的 CPU 負載高效管理大量 LIN 協議消息,支持通常為 10 或 20 Kbit/s 的數據速率。如果有數字輸出,傳感器可以通過 ADC 或 UART 輕松連接。
結論
對于許多更簡單的傳感器,LIN 接口是將數據傳回電子控制單元的最有效方式。在汽車周圍添加更多傳感器正在開辟新應用并更多地利用 LIN 總線,無論是使用單個收發器還是使用傳感器集線器。









 工商網監
工商網監
評論