 電子發燒友App
電子發燒友App


我總結了幾個可以買的到的傳感器,而且也給出了幾個傳感器的選擇標準。 1.高幀率,120Hz是標配 2.體積小巧,滿足狹窄環境安裝 3.功耗低,滿足邊緣計算的能力 4.近紅外波段敏感,因為要對這個波段進行感光 5.黑白的就行,彩色沒有這個必要 我說下為什么用黑白的: 第一,同樣大小的像元,黑白傳感器可以用較小的曝光時間獲取理想的圖像,這樣可以減弱抖動以及飛行運動造成的影響(實際上NAV相機就是采用控制曝光時間來減弱運動模糊的,這個是VIO); 第二,同樣的像素個數,黑白傳感器可以比彩色傳感器獲得更高的空間分辨率,彩色傳感器因為顏色插值的原因會使分辨率降低大約30%左右。當然還有別的原因,如黑白圖像數據量小,處理起來運算量小,實時性高等。 我推薦的是OVM6211,OVM7251,實驗可以使用OV7251. 因為最容易買到的就是OV7251,所以接下來就重點說這個。 首先要知道這個CMOS的像素是30W。
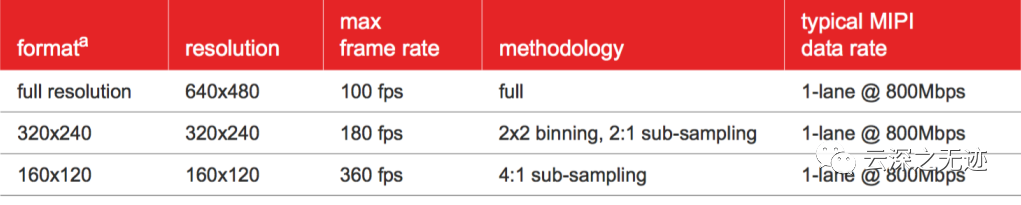
來自豪威科技的OV7251-2B全局快門圖像傳感器是一款3.0微米的傳感器,采用1/7.5英寸光學格式,120fps提供640×480分辨率,并具有單通道MIPI串行輸出接口。這個也就是我選擇的一個原因。 這款產品同時能夠以180 fps提供具有BIN模式的QVGA(320×240),以及以360fps提供具有BIN和SKIP模式的QQQVGA(160×120)。 傳感器可提供99.96%的快門效率,并具有光導功能,可改善光捕獲的角度響應,從而實現更優秀的光學性能。 利用業界最小的全局快門像素,黑白 OV7251 能夠以每秒 120 幀 (fps) 的速度捕獲 VGA (640×480) 分辨率視頻,以 180 fps 的速度捕獲 QVGA (320×240) 視頻,以及 QQVGA (160 ×120) 以 360 fps 進行合并和跳躍。OV7251 的高幀率使其成為低延遲機器視覺應用的理想解決方案。 對,這個全局快門我也要寫一下:
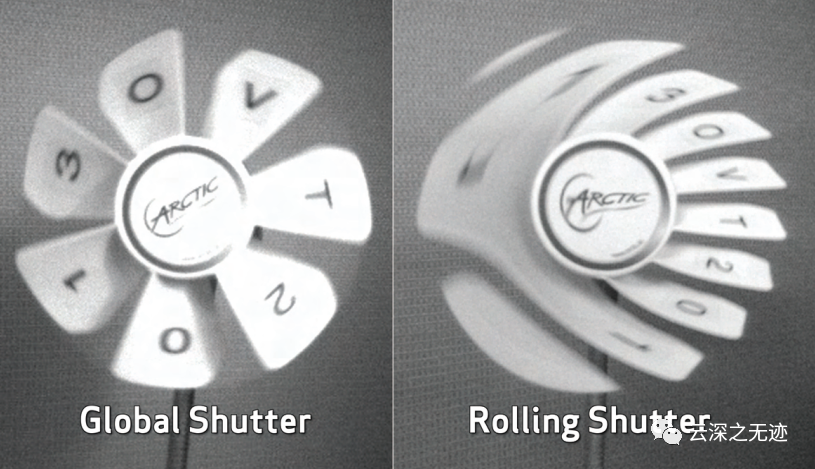
可以看到這個全局快門在拍運動的物體的時候是很有效的
這個是OV6211

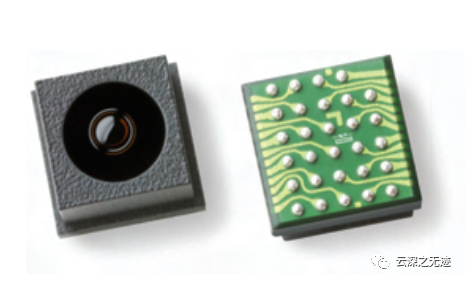
這個是OVM7251
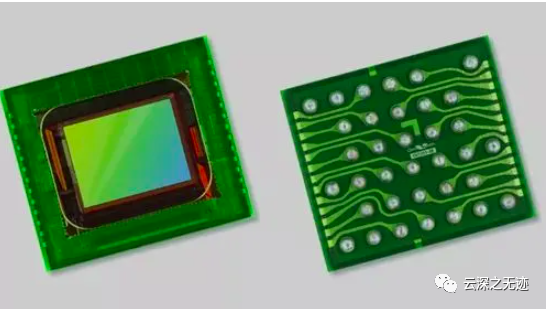
OVM7251表面圖
OVM7251有兩個版本:
用于AR/VR眼動追蹤的850nm模型;支持面部認證中的機器視覺與3D感知的940nm模型。將OVM7251用于支持AR/VR頭顯實現眼動追蹤,設計者可以編程系統集成渲染注視點位置,并降低周圍圖像的分辨率,從而進一步節省功耗。

另外在Pico 3NEO版本的環境攝像頭也是使用的這個模組,就是透視模式使用的攝像頭,大家有機器的可以體驗一下。
卷簾快門傳感器的設計是為了捕捉靜態圖像和視頻拍攝,因此擁有非常高的分辨率和顏色處理能力。但其缺點在于,它是逐行拍攝圖像,拍攝和曝光時間過長,如果拍攝對象是汽車這樣的快速移動物體,圖像可能發生扭曲,而且功耗過高,不適合用于計算機視覺。
而全局快門的原理則完全不同,它是一次拍攝整幅圖像,所有像素同時曝光。而且成像效果準確,曝光時間短,功耗也低,未來計算機視覺將走向全局快門。
卷簾快門像素點常見的在1.1微米以下,而全局快門通常在2.2微米以上。

這個OV6211其實是專門設計給眼動追蹤的傳感器
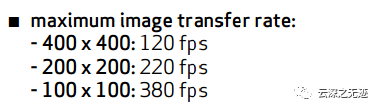
這個是它的一個幀率參數
1/7.5英寸的OV7251具有多種低功耗模式,包括光感應模式和超低功耗待機模式。在光感測模式下,OV7251 的行為類似于環境光傳感器 (ALS),僅當檢測到光變化時才將傳感器從“睡眠模式”喚醒。同樣,在超低功耗模式下,傳感器可以降低分辨率和幀率以進一步降低功耗。 讓我來總結一下:
這個傳感器的輸出頻率是這樣的
我不是很明白,是不是以為數據輸出的帶寬的原因,不過是可以按照一種固定的模式把感興趣的圖像來輸出的。
這種提高幀率的方法叫:開窗方法其中最主要的當屬ROI模式(Region of interest),ROI是在成像應用中,在相機傳感器分辨范圍內定義一個或多個感興趣的窗口區域,僅對這些窗口內的圖像信息進行讀出,只獲取該局部區域的圖像。設定較小的ROI區域可以減少相機傳送及計算機需要處理的圖像信息量,并提高相機的采集幀率。
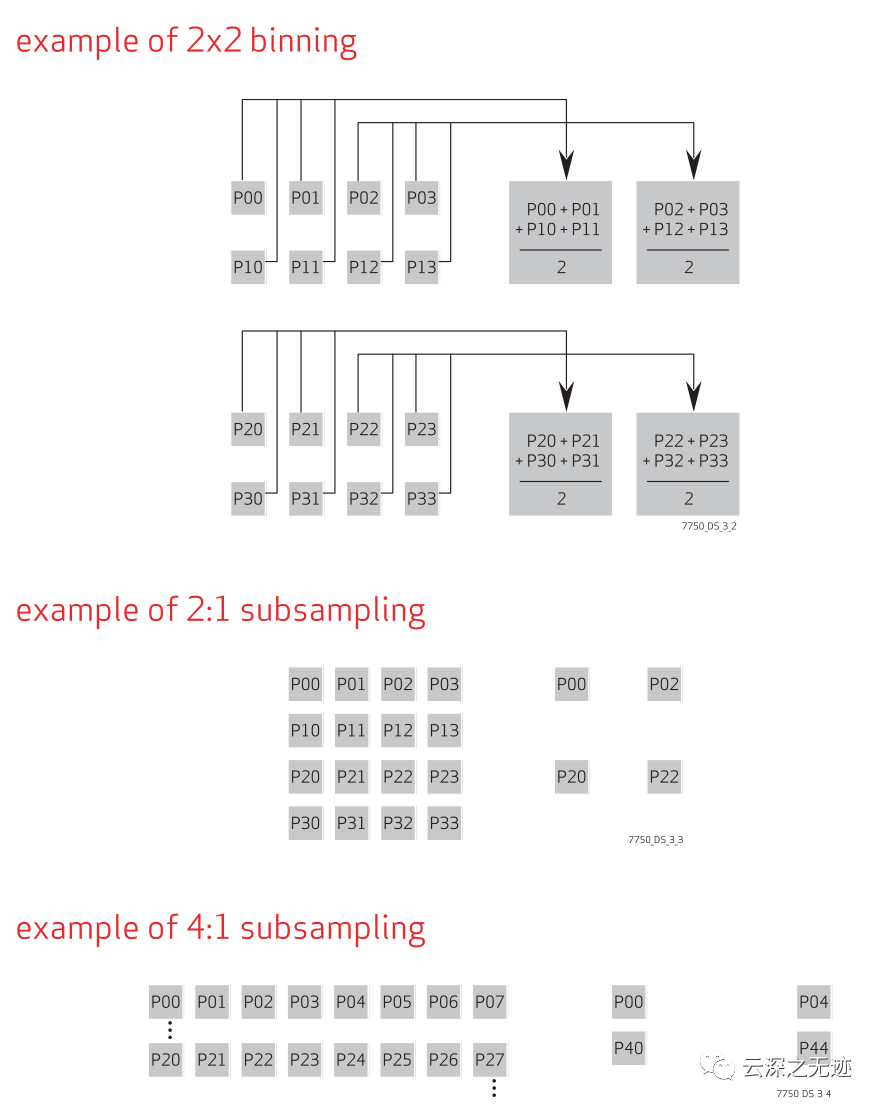
SKIP(Skipping mode),這種模式就是按照一定的規律,把想要的數據采集上來,把其余的數據扔掉。如下所示,column skip 2 row skip 2 留下的就是白色的像素,把黑色的像素丟掉。
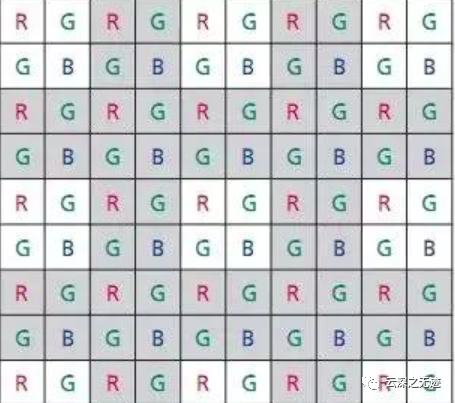
這種模式會改變原有像元之間的相鄰關系,所以對Bayer彩色的相機來說,會造成一定的顏色失真,所以它常見的應用就是預覽,在工業實際中應用并不多。 第三種BIN(binning mode),就是把相鄰的像素合成一個像素,然后再輸出。如下所示,2 bin to 1 所有的像素都參與了新像素的生成。
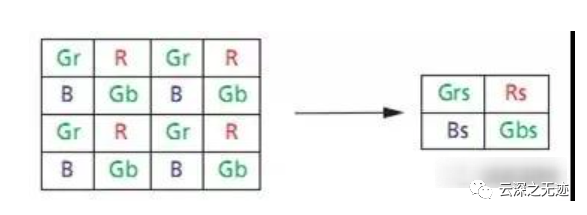
低照度條件下,選擇binning模式圖像效果更佳,有點腦子就知道這個的。
這個是具體的OV采樣模式
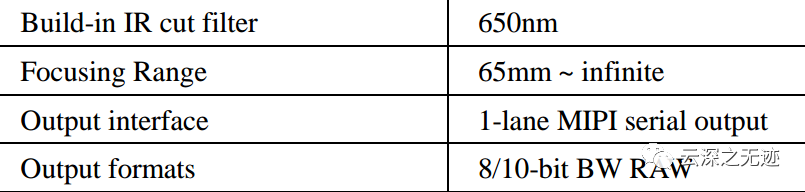
IR cut filter,即紅外截止濾光片,它放在于LENS與Sensor之間。因人眼與CMOS Sensor對各波長的響應不同,人眼看不到紅外光但sensor會感應,因此需要IR cut filter阻絕紅外光。
這個是OV7251
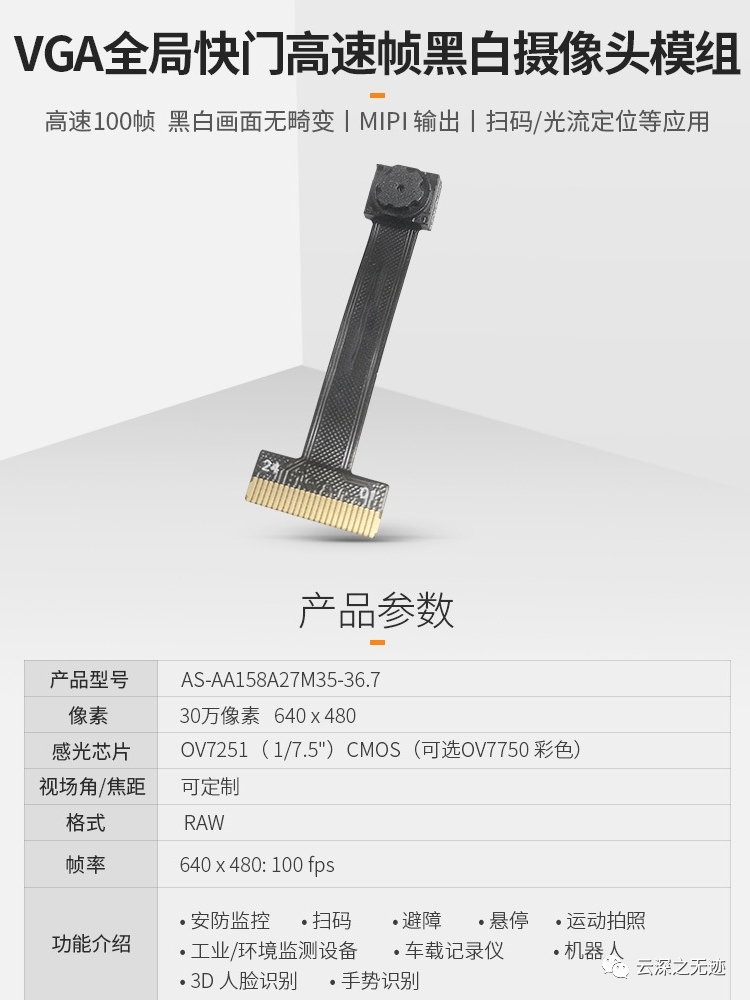
6.5厘米的最小對焦距離有點不太行,太近了,這個是我找的一個模組的信息,不要較真。 輸出的是MIPI的一路,媽的,要學的東西好多,頭皮有點癢。

現在做demo也是可以的,這個距離
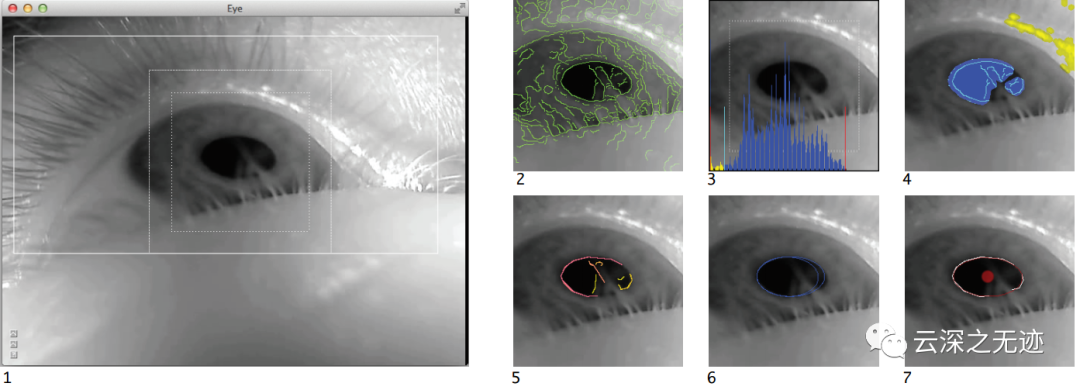
眼球追蹤的幾個階段瞳孔檢測算法的可視化。
1)眼睛圖像轉換為灰度、用戶感興趣區域(白色描邊矩形)和初始值,瞳孔區域的估計(白色方塊和虛線方塊),這樣的優點就是節省算力。
眼動追蹤:梯度法精確定位眼中心(論文),也就是要看我寫的這篇文章。
2)Canny邊緣檢測(綠色線)
3)定義“暗”區域為偏移眼睛圖像直方圖的最低峰值。
4)過濾邊緣以排除光譜反射(黃色),而不是在“暗”區域(藍色)
5)使用連接的組件提取邊緣到輪廓,并根據曲率連續性準則(多色線)分割成子輪廓。
6)候選瞳孔橢圓(藍色)通過橢圓擬合形成
7)通過增強組合搜索找到最終的橢圓擬合(最終橢圓與紅色中心)-支持用白色繪制的邊緣像素。
下面是插一個MIPI硬件設計時候的布線參考:
MIPI因為一種高速差分信號的接口,為了保證信號的同步和一致性,必須保證MIPI DP/DN保持等長,無論是線對與線對之間(pair to pair)還是單組信號的DP/DN之間,一般需要遵守的長度規則如下:camera pair to pair 100mil 單組之間:25mil。 在MIPI走線時,一般需要保持DP/DN在走線的過程中保持等距,保證一定的耦合程度,但是需要弄清楚的時,等長的優先級是高于等距的。且在走線時,線對之間要保持2W的距離。
注:MIPI在走線時優先級最高的是匹配等長,其余的都可以實際要求和應用進行靈活處理
LVDS也是我們使用CMOS的時候常見的數據輸出接口:Low Voltage Differential Signal(低電壓差分信號)
電壓很低,1v左右,消耗資源少,差分信號保證抗干擾能力。 接口由1組差分clock和若干組差分信號線組成,既然有CLK,那么LVDS就是同步信號。LVDS的控制信號和數據信號復用接口,CLK是用于同步。既然是復用的,LVDS的協議中也一定有區分控制信號和數據信號的方法。 LVDS主要用于視頻傳輸的兩個領域: camera和主控——視頻采集 LCD和主控——視頻顯示 LVDS利用差分抗干擾能力,提升clock頻率從而提升貸款,傳輸舉例也更遠,LVDS的時鐘頻率可以非常高。
話說找到一個MIPI+FPGA的方案商,這個宣傳圖咋感覺是DJI???
OV7251是很便宜的,做demo合適

這個是OVM7251,做產品合適,但是貴,要100+

這個是深圳一家眼動的廠子的模組,我不知道放這里是不是合適
但是它這個分辨率和幀率真的是看著還不錯,不知道是哪款芯片
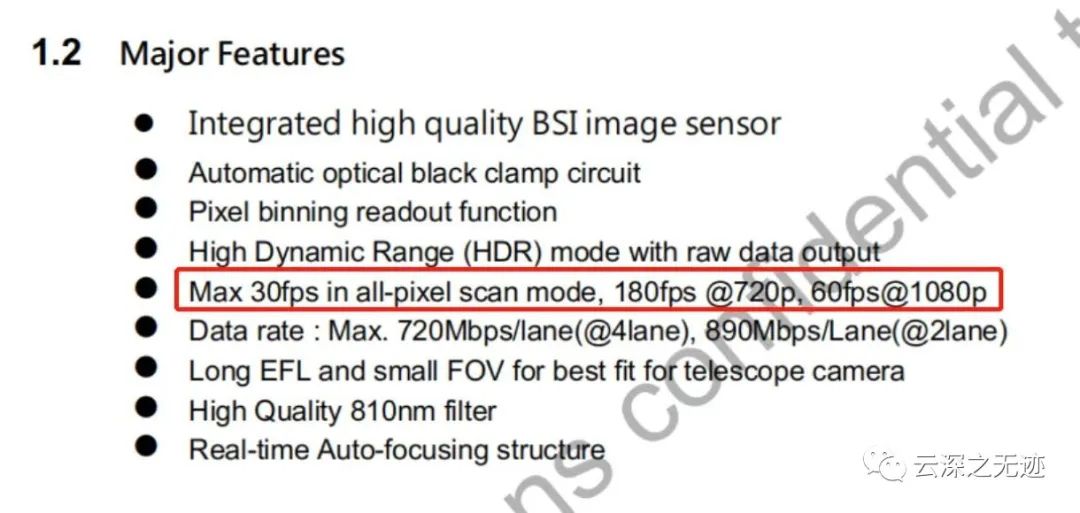
因為我找到了OV7251的數據手冊,那這里也就看一下里面寫了什么:
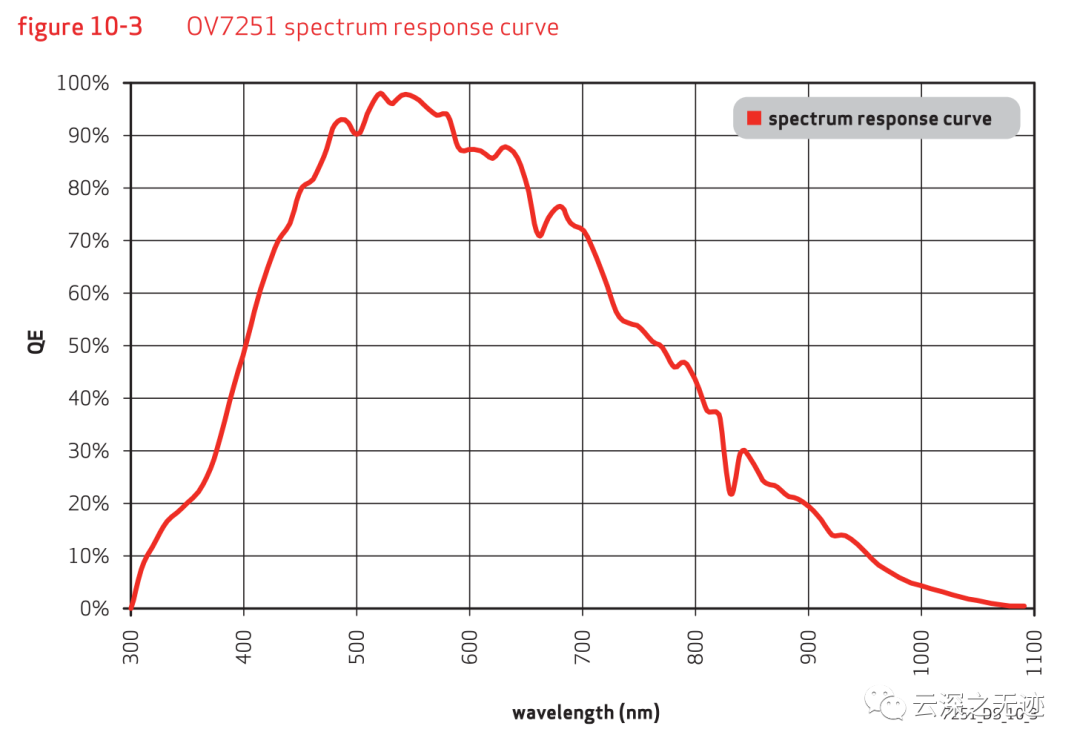
這個OV7xxx,有兩個模組,一個是彩色,一個就是我們的這個,灰色的。
850nm正好是起始的波段
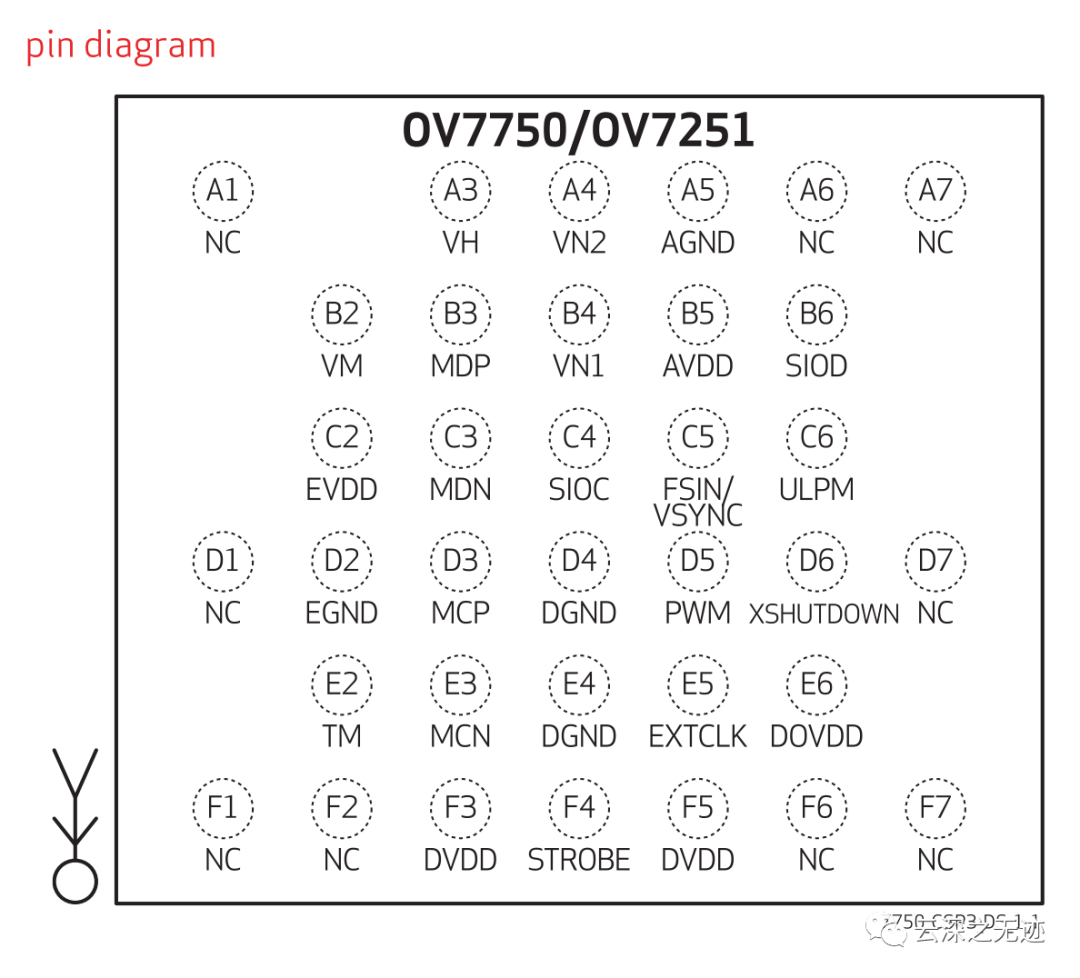
這個就是上面我發的圖下面的引腳,這個其實對我來說意義不大

這個是MIPI接口下的分辨率和幀率
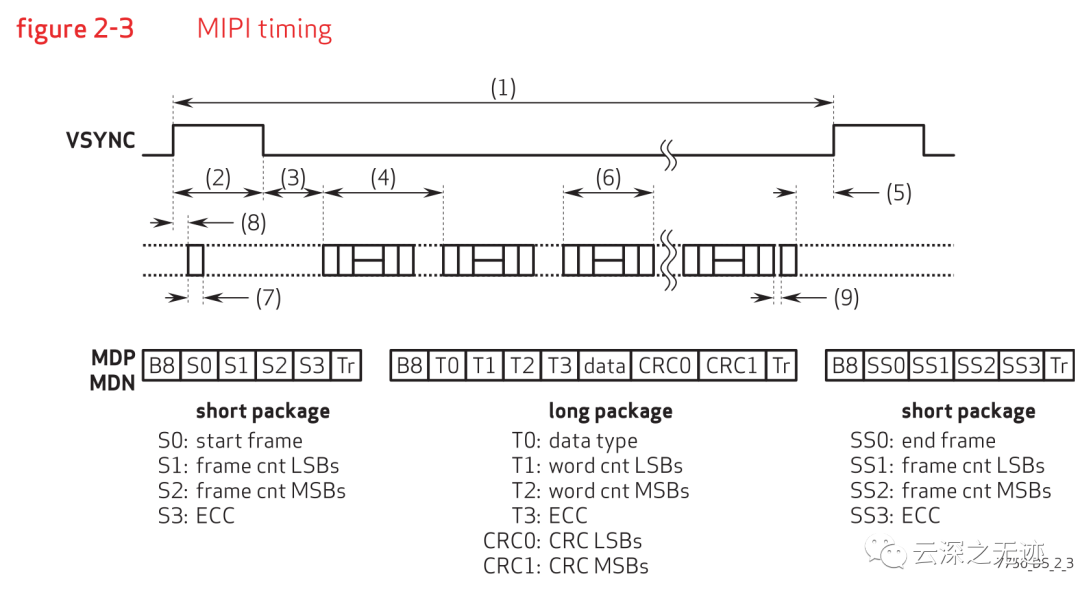
MIPI的時序
輸出的時序控制
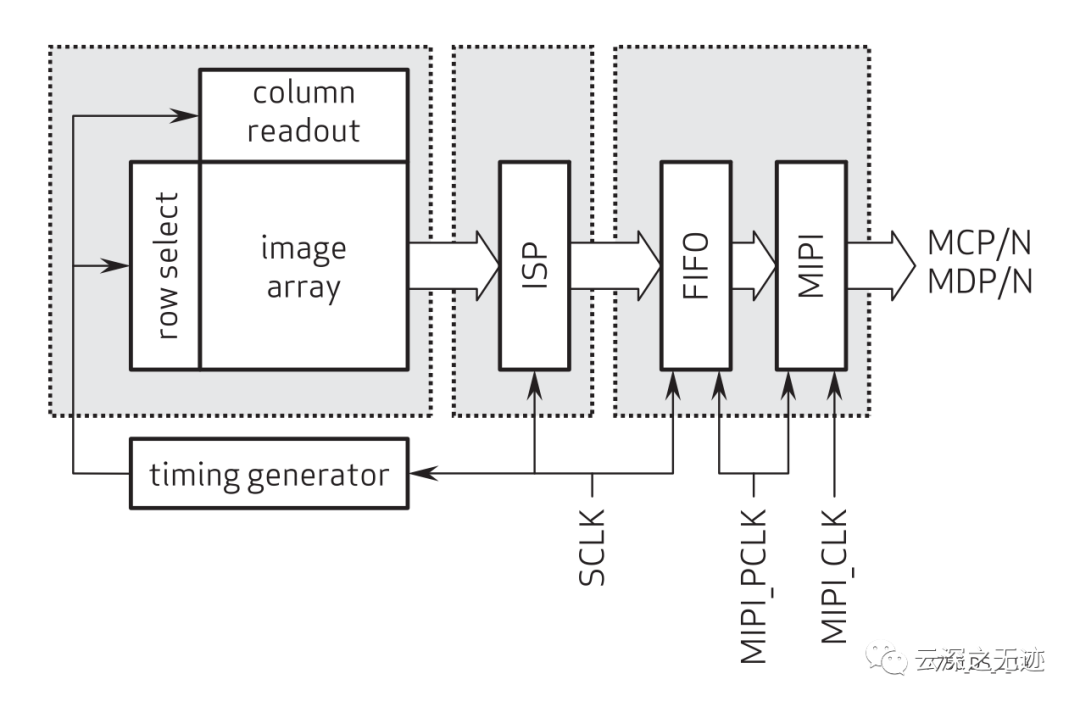
這個是使用FPGA的時候數據框圖
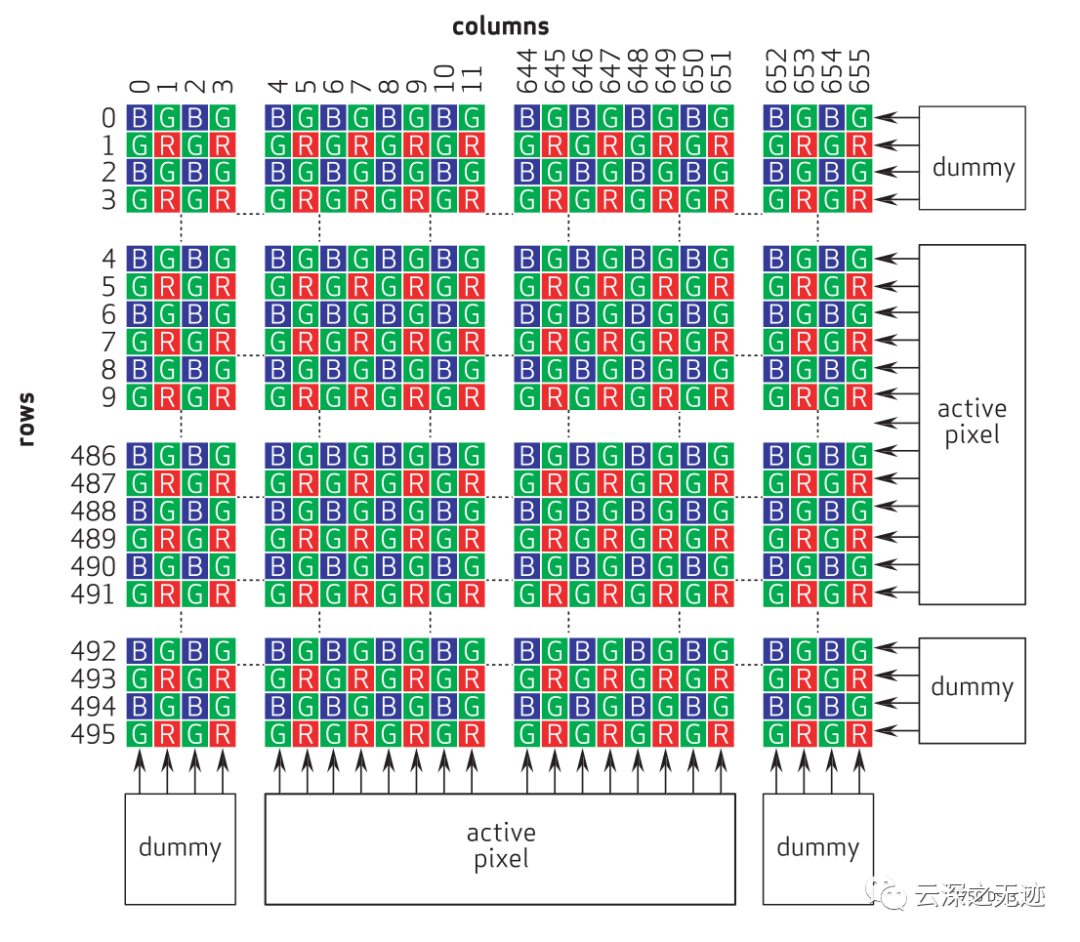
像素矩陣的排列
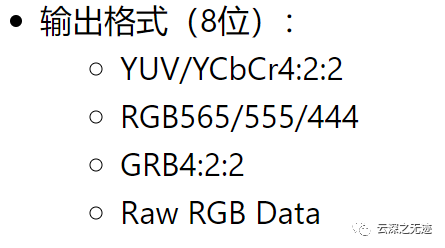
除了RAW,也可以輸出子采樣的圖像
硬件設計的時候,注意的參數
這么高的幀率,我們肯定是使用FPGA來處理的:
分辨率:640 x 480
數據格式:10位灰度
幀率:60fps (匹配顯示器刷新頻率)
傳輸接口:1通道LVDS
速率:600Mbps
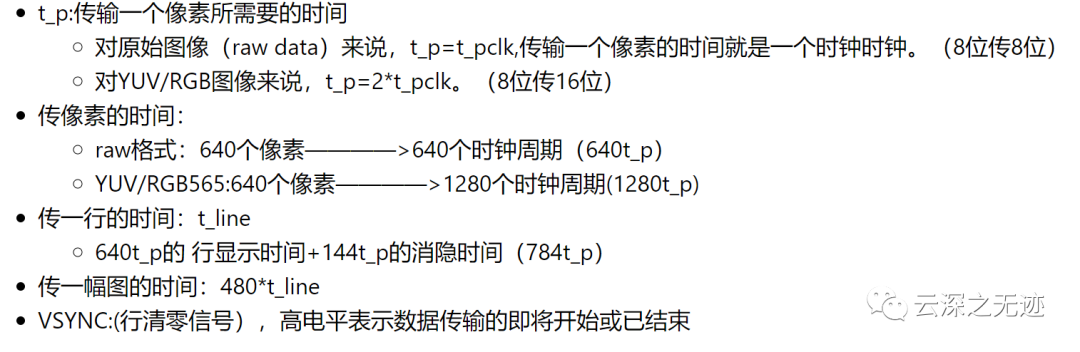
我們需要通過MCLK給攝像頭提供時鐘,RESET是復位線,PWDN在攝像頭工作時應該始終為低。PCLK是像素時鐘,HREF是行參考信號,VSYNC是場同步信號。一旦給攝像頭提供了時鐘,并且復位攝像頭,攝像頭就開始工作了,通過HREF,VSYNC和PCLK同步傳輸數字圖像信號。數據是通過D0~D7這八根數據線并行送出的。
CMOS圖像數據采集模塊,需等待I2C協議對攝像頭內部寄存器進行初始化。寄存器全部配置完成后,還需等待10幀數據,此等待10幀數據的目的是等待攝像頭工作狀態穩定。待寄存器配置生效、攝像頭工作狀態穩定后再開始采集圖像。?
具體地,待等待幀數等于10時,會使能標志信號frame_val_flag,使得OV7251開始對采集的圖像數據中相應范圍0~76800(340×240)的8位像素點數據經拼接操作,轉存到寄存器data2ram中,data2ram將輸出拼接后的16位數據到SRAM模塊的輸入引腳dina。
這個就是一個簡單的采集過程。
另外小米8也是使用了這個模組:增加了紅外人臉解鎖功能,還是依靠了聽筒右邊的補光燈和型號為OV7251 IR Sensor去實現這樣一個功能,先照亮人臉,再去接收黑白的圖像,然后再識別解鎖。相比以往依靠前攝像頭去解鎖的話,小米8對于光線環境是沒有要求的,這也依靠了紅外線的活體檢測能力,且同單純的攝像頭來對比,安全性會更高一些。
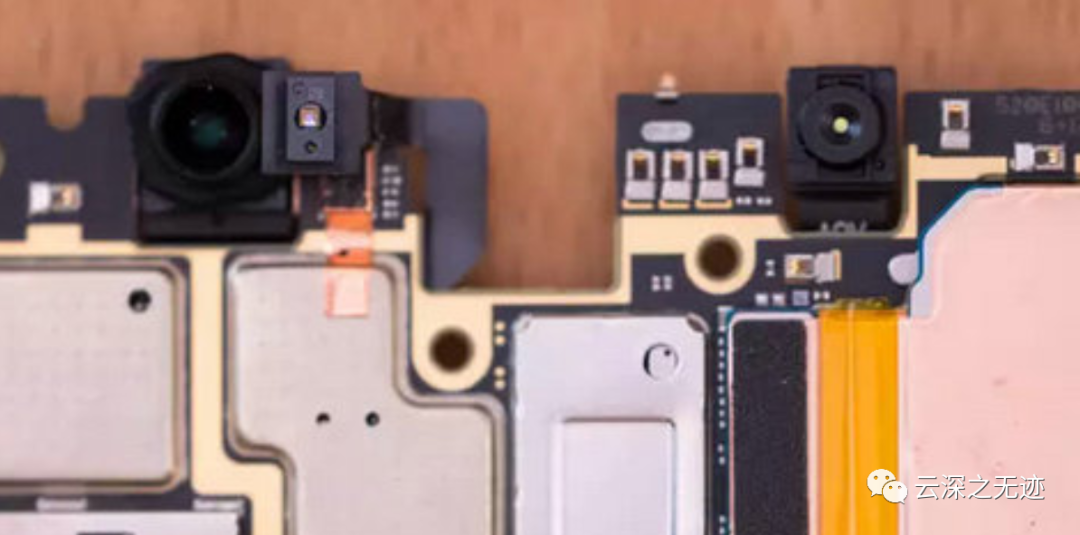
在這里
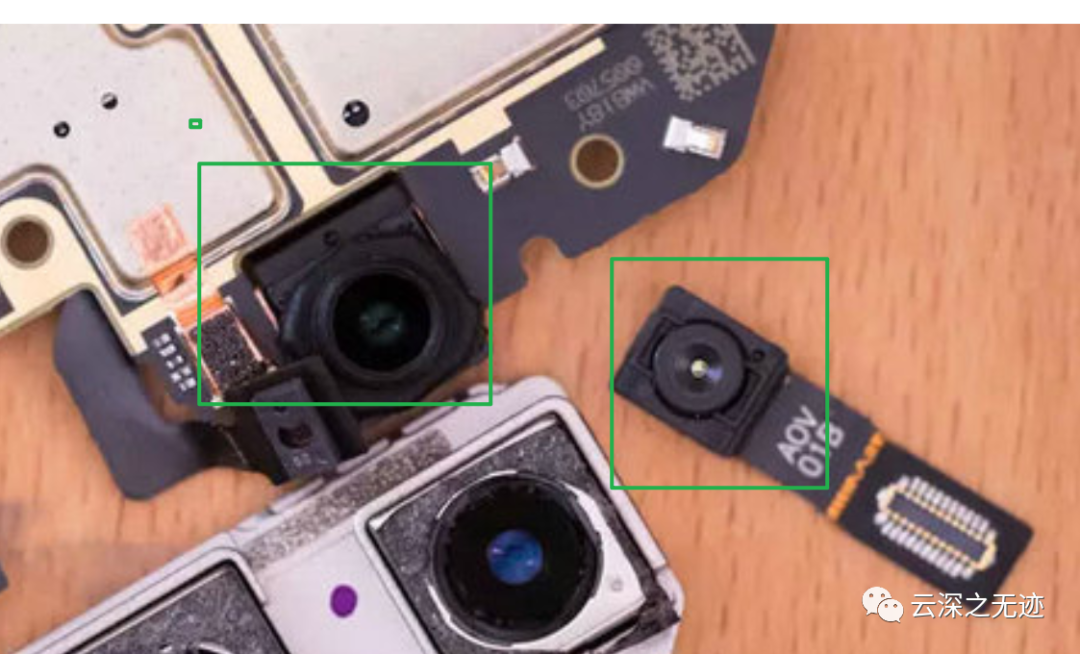
這里
這個傳感器賣的是真的好!
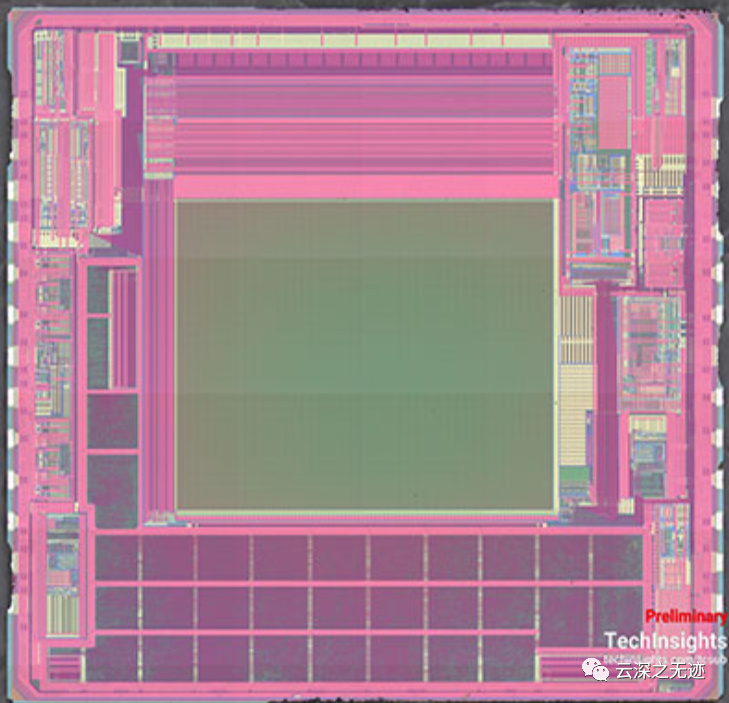
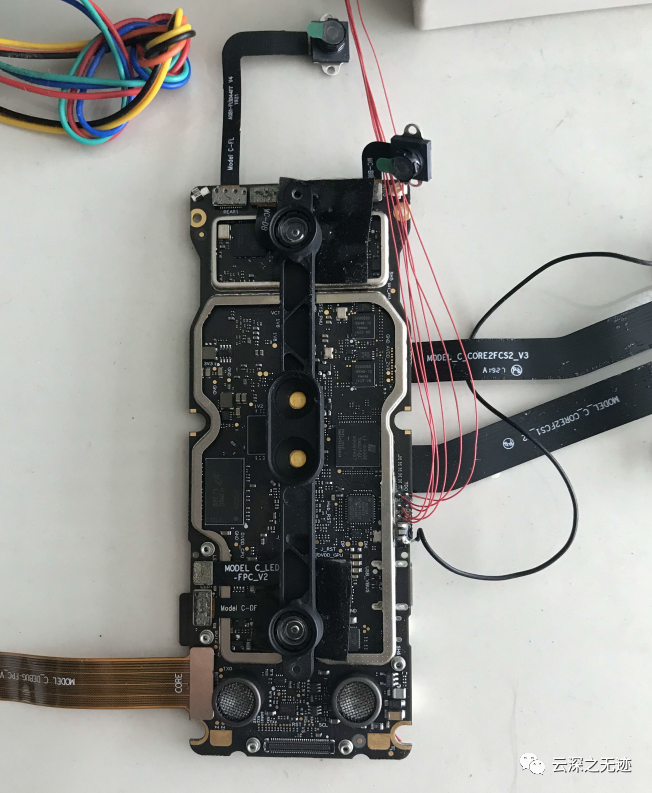
接下來拆個Huawei P30的主傳感器吧~
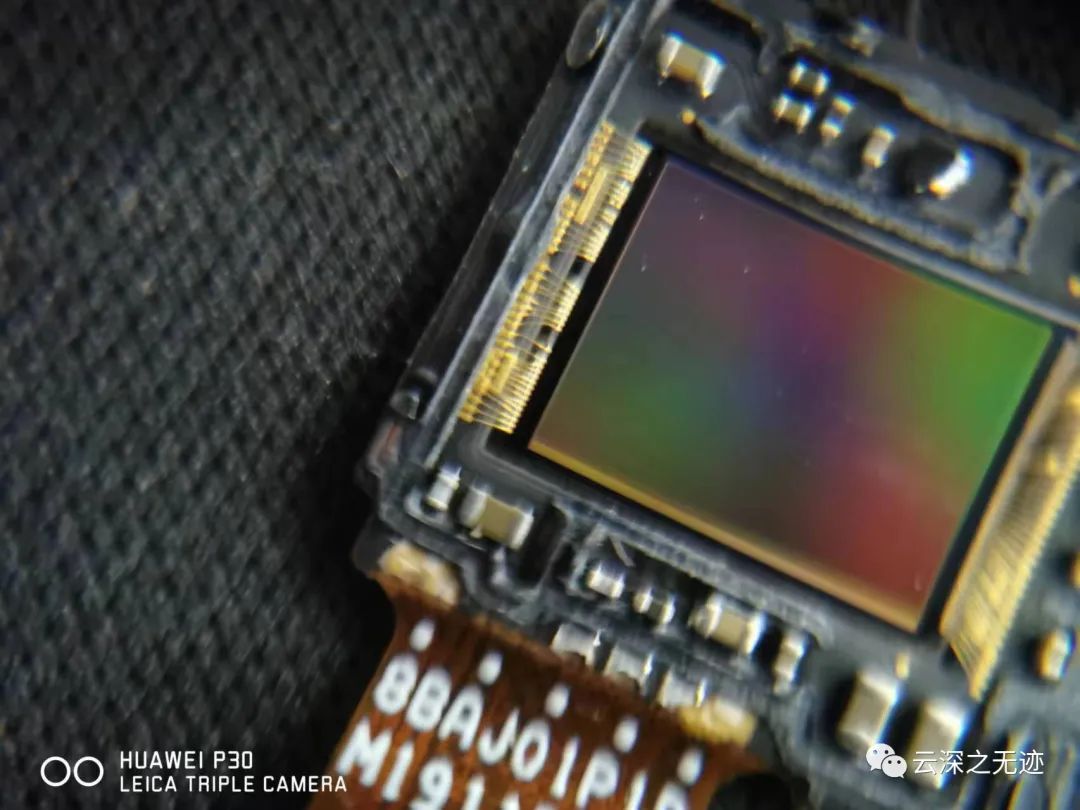
特寫

和我手的比較
放大的CMOS引腳

換另一邊

全挑斷

破壞一下
全球第一個在華為P30傳感器上面刻字的成就
編輯:黃飛
?










 工商網監
工商網監
評論