 電子發(fā)燒友App
電子發(fā)燒友App


一周之前,特斯拉將在新車型上安裝4D毫米波雷達(dá)的消息不脛而走。
知名白客Green在推特上直接放出了特斯拉向監(jiān)管機(jī)構(gòu)申請(qǐng)的文檔結(jié)構(gòu),讓“特斯拉即將重歸毫米波雷達(dá)懷抱”的信息真實(shí)性更加一籌。要知道,特斯拉在2021年才把車型上的毫米波雷達(dá)拿掉。
而一個(gè)星期內(nèi),與特斯拉有合作緋聞的4D毫米波雷達(dá)企業(yè)Arbe股價(jià)飛升,國(guó)內(nèi)一批公司,也從苦逼的傳統(tǒng)汽車零部件供應(yīng)商,化身4D毫米波雷達(dá)概念股。比如晉拓股份,股價(jià)一周飆漲50%——盡管毫米波雷達(dá)業(yè)務(wù)在其營(yíng)收中占比還不足1%。
那么問(wèn)題來(lái)了:
1. 離特斯拉拋掉毫米波雷達(dá)還不到兩年,怎么又把它給裝回去了?
2. 資本熱捧4D毫米波雷達(dá),僅僅是因?yàn)樘厮估瓗ш?duì)嗎?
3. 同樣是雷達(dá),升級(jí)過(guò)后的4D毫米波雷達(dá)會(huì)對(duì)激光雷達(dá)構(gòu)成威脅嗎?
1/ 硬件升維
時(shí)間回到2021年,當(dāng)年5月,特斯拉宣布移除北美出產(chǎn)車型上所有的毫米波雷達(dá)。在智能駕駛的技術(shù)框架里,毫米波雷達(dá)是一種相對(duì)成熟的傳感器,可以穩(wěn)定地測(cè)速、測(cè)距,并在全天候環(huán)境下工作。
而在成本狂魔馬斯克治下,特斯拉多年來(lái)一直使用來(lái)自大陸的毫米波雷達(dá)ARS 410,這款入門級(jí)產(chǎn)品以極高的性價(jià)比,幫助特斯拉實(shí)現(xiàn)了基本的輔助駕駛能力。
但隨著智能駕駛對(duì)汽車感知能力的要求越來(lái)越高,這顆低端毫米波雷達(dá)的短板愈發(fā)明顯:分辨率太低,對(duì)物體看不清;沒(méi)有測(cè)高能力,無(wú)法對(duì)環(huán)境形成立體的感知。
這導(dǎo)致的直接結(jié)果是,感知能力日新月異的攝像頭和原地踏步的毫米波雷達(dá)不時(shí)相互打架,帶來(lái)幽靈剎車等問(wèn)題。
按馬斯克的話說(shuō),毫米波雷達(dá)在智能駕駛的數(shù)據(jù)流里已經(jīng)成了一個(gè)污染源——讓一個(gè)弱視來(lái)當(dāng)領(lǐng)航員,當(dāng)然不太明智。
因此,依托算法優(yōu)勢(shì)讓高分辨率的攝像頭擁有了立體感知能力后,特斯拉果斷砍掉了車型上的毫米波雷達(dá)。在那之后,馬斯克也在推特上留下了一句伏筆:只有高分辨率的雷達(dá)才行。
其實(shí)在馬斯克之前,車載毫米波雷達(dá)行業(yè)已經(jīng)意識(shí)到,傳統(tǒng)毫米波雷達(dá)難以在未來(lái)的高階智能駕駛系統(tǒng)中立足。
因此無(wú)論是大陸、采埃孚等傳統(tǒng)豪強(qiáng),還是國(guó)內(nèi)外創(chuàng)業(yè)公司,都踏上了賽場(chǎng):為毫米波雷達(dá)添加測(cè)高能力,大幅提升分辨率,讓其能夠成像。對(duì)這一類產(chǎn)品,行業(yè)稱之4D毫米波雷達(dá)或者4D成像雷達(dá)。
而4D毫米波雷達(dá)的比賽,首先是一場(chǎng)“通道軍備競(jìng)賽”。靠接收電磁波工作的傳感器遵循一些共通的規(guī)律,攝像頭是“底大一級(jí)壓死人”,激光雷達(dá)是“線數(shù)越高越清晰”,毫米波雷達(dá)則是:分辨率與信號(hào)(收發(fā))通道數(shù)量成正比。為了成倍擴(kuò)充通道以獲得成像能力,行業(yè)中已經(jīng)至少分化出了三種技術(shù)派別:

力大磚飛派:多芯片級(jí)聯(lián)
傳統(tǒng)毫米波雷達(dá)通常僅使用一枚MMIC(單片微波集成電路,與天線組成信號(hào)收發(fā)單元)芯片,收發(fā)能力有限。而多芯片級(jí)聯(lián)方案的思路非常直觀——能力不夠,數(shù)量來(lái)湊,通過(guò)堆疊多塊MMIC芯片,實(shí)現(xiàn)通道數(shù)量的乘數(shù)疊加:
在MIMO技術(shù)體制下,單枚MMIC芯片通常擁有12條通道(3發(fā)4收)。雙芯片級(jí)聯(lián)可以擴(kuò)充至48通道(6發(fā)8收),四芯級(jí)聯(lián)則可進(jìn)一步擴(kuò)充至192通道(12發(fā)16收)。
由于工藝/元器件相對(duì)成熟,技術(shù)開發(fā)難度較小,這一方案最為主流,車載毫米波雷達(dá)大廠和眾多國(guó)內(nèi)公司普遍采用。比如行業(yè)首枚4D毫米波雷達(dá)大陸ARS 540,采埃孚搭載于飛凡R7上的PREMIUM,均是4芯片級(jí)聯(lián)方案,擁有192個(gè)通道。
不過(guò),這條簡(jiǎn)單的思路并不能無(wú)限延續(xù)。多芯級(jí)聯(lián)方案在成倍擴(kuò)充通道的同時(shí),也會(huì)成倍地提升雷達(dá)的體積、功耗、成本。這為另一個(gè)派別的出現(xiàn)提供了契機(jī)。
萬(wàn)劍歸宗派:高度集成單芯片
與多芯片級(jí)聯(lián)的堆疊思路完全相反,高度集成的單芯片選擇將收發(fā)單元以及其他分立元器件微縮化,塞進(jìn)一枚芯片中。
這一路線的擁躉,包括與特斯拉傳出緋聞的Arbe,以及背靠英特爾的Mobileye,兩者均在高度集成芯片方案上,推出了總通道數(shù)量高達(dá)2304個(gè)的4D毫米波雷達(dá)產(chǎn)品。
因?yàn)閷?duì)器件小型化,這一路線在寸土寸金的晶圓上集成大量通道,不僅能夠節(jié)省體積與功耗,還有極大降本空間。但問(wèn)題在于,這一方案會(huì)面臨更嚴(yán)苛的電磁波信號(hào)串?dāng)_問(wèn)題,并且要啟用并不成熟的晶圓工藝。
一位毫米波雷達(dá)行業(yè)人士向我們分析,特斯拉曾經(jīng)與Arbe洽談雷達(dá)技術(shù)合作,但最終選擇自研,最主要的影響因素應(yīng)該是技術(shù)方案成熟度問(wèn)題。
力出一孔派:車載相控陣?yán)走_(dá)
相比于前兩個(gè)派別,車載相控陣?yán)走_(dá)的方案則更加大膽。相控陣的原理是通過(guò)特制的天線改變電磁波相位,將分散的能量集中成束,達(dá)到掃描的效果,從而顯著提高雷達(dá)分辨率。理論上,相控陣毫米波雷達(dá)擁有極高的性能上限。
在軍事上相控陣?yán)走_(dá)早已有應(yīng)用,但傳統(tǒng)相控陣?yán)走_(dá)體積龐大,難以直接用于汽車,因此需要開發(fā)全新的材料,將雷達(dá)小型化。因此行業(yè)又將這一路線稱為超材料,扛旗企業(yè)主要是國(guó)外初創(chuàng)MetaWave、Echodyne等。
軍艦用相控陣?yán)走_(dá)
不過(guò),基礎(chǔ)的新材料開發(fā)向來(lái)周期漫長(zhǎng),這一派別的技術(shù)成熟度目前最低。顯然,無(wú)論是豪強(qiáng)還是初創(chuàng),無(wú)論采用傳統(tǒng)還是新興技術(shù)方案,參與者都必須直面這樣的游戲規(guī)則:4D毫米波雷達(dá)必須在受限的成本、功耗、體積中,盡力提高信噪比與分辨率。這是一個(gè)典型的螺螄殼里做道場(chǎng)的活計(jì)。
2/ 算法決勝
即使是特斯拉也不例外。在向監(jiān)管部門提供的文件中,特斯拉的4D毫米波雷達(dá)方案采用雙芯片級(jí)聯(lián)方案,擁有48通道(6發(fā)8收),對(duì)應(yīng)的是較低的成本,更可控的制程保障,以及較小的體積。
特斯拉向監(jiān)管部門提交的4D毫米波雷達(dá)設(shè)計(jì)
特斯拉向來(lái)有不拼傳感器硬件參數(shù)的傳統(tǒng)。2021年當(dāng)國(guó)內(nèi)新勢(shì)力紛紛啟用800萬(wàn)像素?cái)z像頭時(shí),特斯拉車型搭載的仍然是祖?zhèn)?20萬(wàn)像素?cái)z像頭,參數(shù)約等于十五年前的手機(jī)鏡頭。
但特斯拉通過(guò)基于大量數(shù)據(jù)不斷迭代算法,在數(shù)年時(shí)間內(nèi)開發(fā)出HydronNet、BEV以及Occupancy Network等算法,仍然引領(lǐng)了純視覺自動(dòng)駕駛路線。不過(guò),目前僅依靠攝像頭的智能駕駛還是有難以克服的Corner Case。就在本月,特斯拉宣布召回36萬(wàn)輛車,原因是基于視覺的FSD存在安全隱患。
而一枚4D毫米波雷達(dá)的加入,可以提供帶有距離信息的三維點(diǎn)云,彌補(bǔ)純視覺算法的不足,提升特斯拉智能駕駛算法的上限。
國(guó)內(nèi)毫米波雷達(dá)創(chuàng)業(yè)公司行易道總裁江軍安認(rèn)為,特斯拉引入4D毫米波雷達(dá)最直接的作用是,可以通過(guò)增加測(cè)高和更高的角分辨率進(jìn)一步提升AEB(自動(dòng)緊急制動(dòng))功能的表現(xiàn)和適用場(chǎng)景,更好地保證智能駕駛的安全性。
這需要盡力壓榨4D毫米波雷達(dá)的潛力,并與其他傳感器妥善地融合——軟件算法是這一過(guò)程的關(guān)鍵因素。
Sensefreedom算法總監(jiān)姚偉偉告訴我們,特斯拉自研雷達(dá)的硬件選型,側(cè)面反應(yīng)出其對(duì)4D毫米波雷達(dá)的側(cè)重點(diǎn)在算法上。江軍安的判斷則是,算法將是4D毫米波雷達(dá)的主要壁壘,也是差異化競(jìng)爭(zhēng)的核心環(huán)節(jié)。
毫米波雷達(dá)算法可以粗略分為基礎(chǔ)的信號(hào)處理算法和上層的感知算法,前者決定毫米波雷達(dá)是否“看得清”,后者決定是否“看得懂”。在此之前,一些初創(chuàng)公司嘗試從信號(hào)處理算法的創(chuàng)新入手,推高4D毫米波雷達(dá)的性能極限。
比如國(guó)內(nèi)行易道開發(fā)了壓縮感知算法,在已定點(diǎn)的雙芯片級(jí)聯(lián)4D雷達(dá)的硬件基礎(chǔ)上將雷達(dá)的角分辨率做到了0.7°以下;森思泰克也采用超分辨算法,推出了角分辨率0.7°的四片級(jí)聯(lián)產(chǎn)品。國(guó)外大廠已經(jīng)量產(chǎn)的產(chǎn)品這一數(shù)據(jù)均超過(guò)1°。
新信號(hào)處理和感知算法和多通道的射頻設(shè)計(jì)幫助4D毫米波雷達(dá)獲得更小的角分辨率,通常意味著更清晰的成像能力,但要讓4D毫米波雷達(dá)擁有更強(qiáng)競(jìng)爭(zhēng)力,還需要成像和識(shí)別算法的進(jìn)步。
此前,傳統(tǒng)毫米波雷達(dá)由于分辨率太低,不具備成像能力,很難依托它精確識(shí)別物體,其主要作用是對(duì)物體進(jìn)行聚類、追蹤。
而4D毫米波雷達(dá)能夠成像,則為大規(guī)模引入機(jī)器學(xué)習(xí)創(chuàng)造了條件,在經(jīng)過(guò)機(jī)器學(xué)習(xí)訓(xùn)練后,4D毫米波雷達(dá)對(duì)物體的識(shí)別能力將會(huì)進(jìn)一步提升——就像攝像頭的感知能力不斷升級(jí)那樣。
毫米波雷達(dá)點(diǎn)云仍有進(jìn)步空間
但這樣做的前提是,要有足夠的數(shù)據(jù)作為養(yǎng)料喂養(yǎng)算法。因此,那些先行量產(chǎn)4D毫米波雷達(dá)、擁有更大出貨量的企業(yè),能夠在算法改進(jìn)上占得先機(jī)。
而論數(shù)據(jù)閉環(huán)能力,沒(méi)有公司比得上特斯拉。如果特斯拉今年就在新生產(chǎn)車型上全面導(dǎo)入HW4.0,那么到明年將擁有上百萬(wàn)臺(tái)裝車的4D毫米波雷達(dá)。龐大車隊(duì)收集的海量數(shù)據(jù),能夠使特斯拉以比任何公司都快的速度迭代其算法。
不過(guò),4D毫米波雷達(dá)的從業(yè)者普遍認(rèn)為,特斯拉的進(jìn)場(chǎng)是利好大于競(jìng)爭(zhēng)。因?yàn)楹笳叩氖痉缎?yīng)帶來(lái)的不僅是資本市場(chǎng)的關(guān)注,也會(huì)讓更多車企加速4D毫米波雷達(dá)的上車,讓算法在量產(chǎn)中持續(xù)改進(jìn)。
3/ “同門”暗戰(zhàn)
在理想的智能駕駛傳感器架構(gòu)中,攝像頭、毫米波雷達(dá)、激光雷達(dá)互為冗余,能力互補(bǔ)。但現(xiàn)實(shí)的情況是,在有限的資源下(主要是成本),只有少數(shù)量產(chǎn)車能同時(shí)配齊攝像頭、4D毫米波雷達(dá)與激光雷達(dá),三者之間的競(jìng)爭(zhēng)同樣明顯。
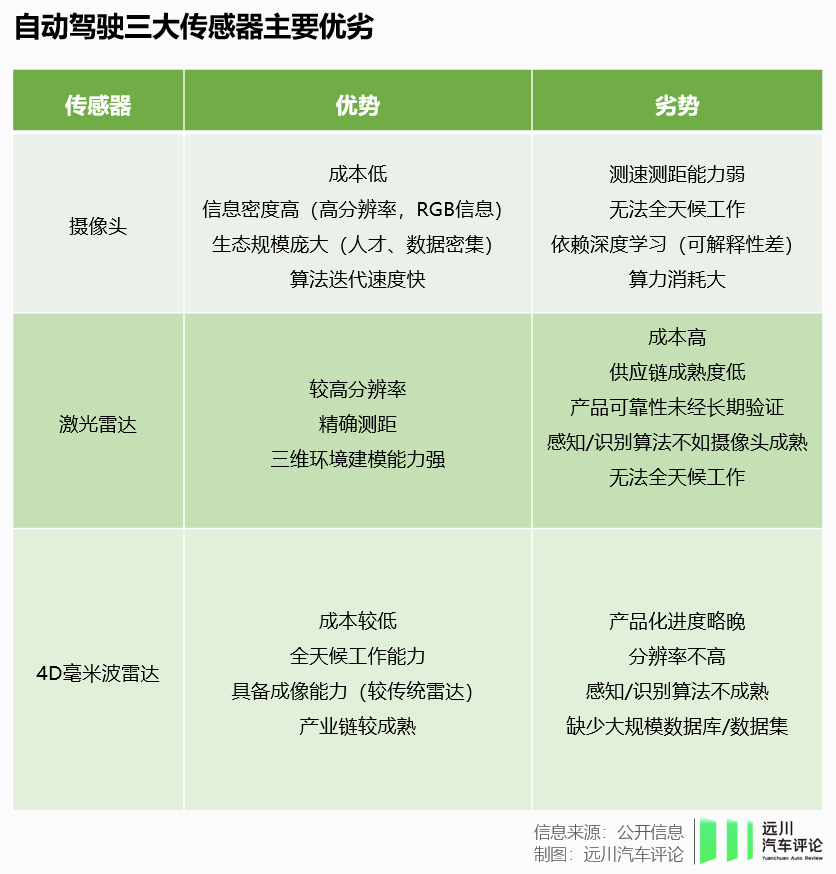
若以一場(chǎng)賽跑作比,攝像頭是一個(gè)短板極少、身位領(lǐng)先的全能型選手,同時(shí)具備低成本、高信息密度、生態(tài)成熟等優(yōu)勢(shì)。
而毫米波雷達(dá)與激光雷達(dá)各有優(yōu)劣,前者成本較低,擁有全天候工作能力,后者成像能力更強(qiáng),可提供精確的環(huán)境建模能力。
而對(duì)環(huán)境進(jìn)行三維建模,是高階智能駕駛必須的工作,要求傳感器必須具備高分辨率、三維探測(cè)能力。
高線束激光雷達(dá)天生擁有這一能力,而攝像頭也通過(guò)BEV、Occupancy Network(格柵網(wǎng)絡(luò))等神經(jīng)網(wǎng)絡(luò)算法獲得了這一能力,毫米波雷達(dá)實(shí)現(xiàn)從二維到三維、從低清到高清的躍升則略晚了一步。
因此,自2020-2022年,毫米波雷達(dá)在高階智駕的體系中地位實(shí)際上在邊緣化,不僅一度被特斯拉開除,還見證激光雷達(dá)邁入商業(yè)化元年、走向高階智駕核心傳感器。
第一款4D毫米波雷達(dá)大陸ARS 540
而毫米波完成向4D的轉(zhuǎn)變后,也試圖向核心傳感器的位置發(fā)起沖擊,對(duì)標(biāo)激光雷達(dá)。不止一家毫米波雷達(dá)公司表示,其推出的4D毫米波雷達(dá)角分辨率可以達(dá)到0.7°到0.5°(工作頻率30hz)——這已經(jīng)逼近64線激光雷達(dá)的水平。如果這一分辨率能升級(jí)至0.1°,那么則約等于128線激光雷達(dá)。
特斯拉啟用4D毫米波雷達(dá),標(biāo)明了一條可以嘗試的路徑:廉價(jià)(百元級(jí))的攝像頭與成本稍高(千元級(jí))的4D毫米波雷達(dá)配合,取代成本高昂(數(shù)千元)的激光雷達(dá)。
不過(guò),由于頻率、探測(cè)原理的限制,4D毫米波雷達(dá)短期內(nèi)趕上激光雷達(dá)的性能并不現(xiàn)實(shí)。車企與毫米波雷達(dá)供應(yīng)商共同端掉激光雷達(dá)飯碗的前提是,擁有強(qiáng)大的基于視覺的算法能力。并不是每一家車企,都是特斯拉。
更加符合現(xiàn)實(shí)的情形是:激光雷達(dá)需要將降低成本的戰(zhàn)役進(jìn)行到底,并不斷提升可靠性,從“精密儀器”轉(zhuǎn)向“車規(guī)級(jí)零部件”。
4D毫米波雷達(dá)進(jìn)一步提高分辨率,建立起更成熟的算法,完成對(duì)傳統(tǒng)毫米波雷達(dá)的替換。至于攝像頭,無(wú)論激光雷達(dá)還是4D毫米波雷達(dá)勝出,它都很難被取代。
編輯:黃飛











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論