 電子發(fā)燒友App
電子發(fā)燒友App


3D視覺傳感方案技術(shù)介紹
深度傳感鏡頭作為智能手機(jī)創(chuàng)新模式,蘋果在最新版iPad Pro上搭載了D-ToF(直接飛行時間法)深度傳感鏡頭,推動了3D視覺在消費(fèi)場景的應(yīng)用。
3D視覺傳感技術(shù)是一種深度傳感技術(shù),除了對象的X和Y值之外,還可以記錄Z值。
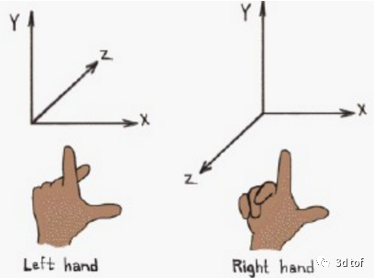
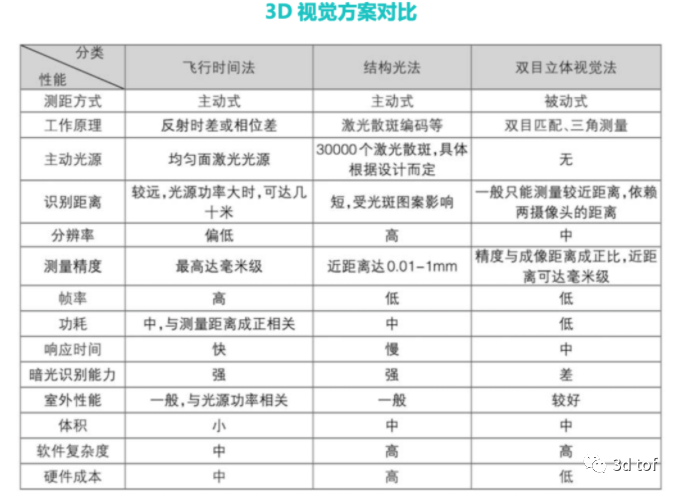
3D坐標(biāo)系 主流的3D光學(xué)視覺方案:雙目立體視覺法(Stereo Vision,在下文稱雙目法),結(jié)構(gòu)光法(Structured Light,在下文稱結(jié)構(gòu)光)以及飛行時間法(Time of Flight, ToF在下文稱ToF)
2、雙目立體視覺法:tereo Vision
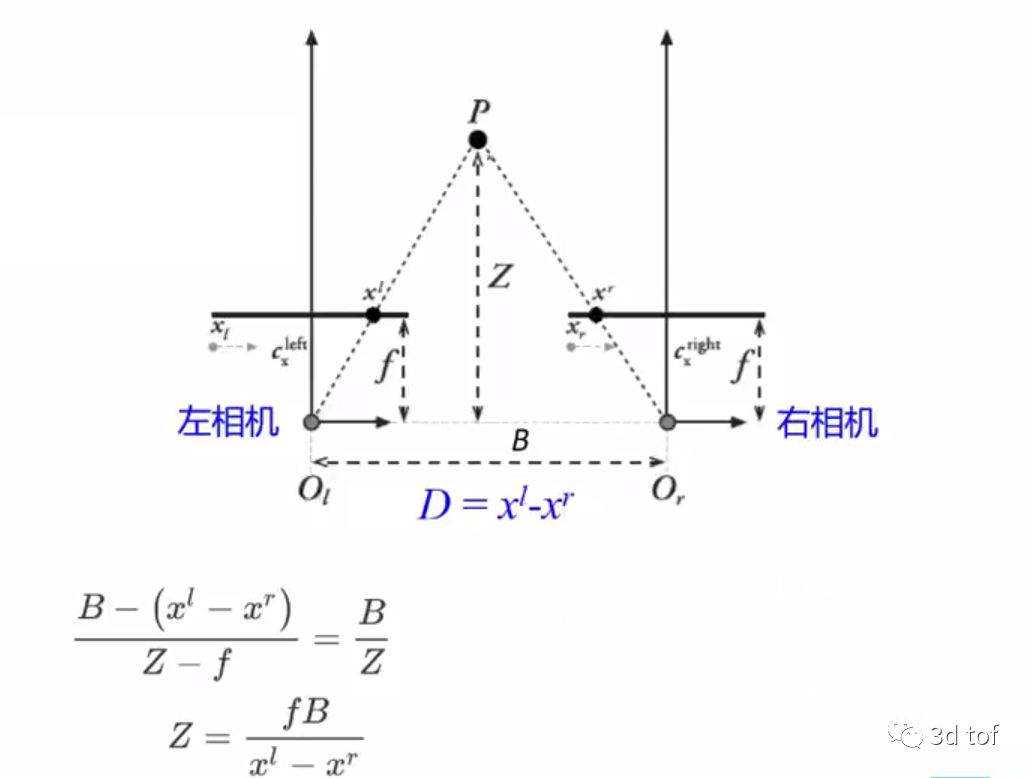
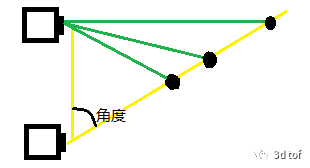
通過三角測量原理來計算圖像像素間的位置偏差(視差)來獲取物體的三維圖像,比如把一只手指放在鼻尖前方,左右眼看到手指會有一個錯位的效果,這個位置差被稱為視差。相機(jī)所要拍攝的物體離相機(jī)越近,視差越大,離相機(jī)越遠(yuǎn),視差就越小。通常采用兩個攝像機(jī)作為視覺信號的采集設(shè)備,通過雙輸入通道圖像采集卡與計算機(jī)連接,把攝像機(jī)采集到的模擬信號經(jīng)過采樣、濾波、強(qiáng)化、模數(shù)轉(zhuǎn)換,最終向計算機(jī)提供圖像數(shù)據(jù)。
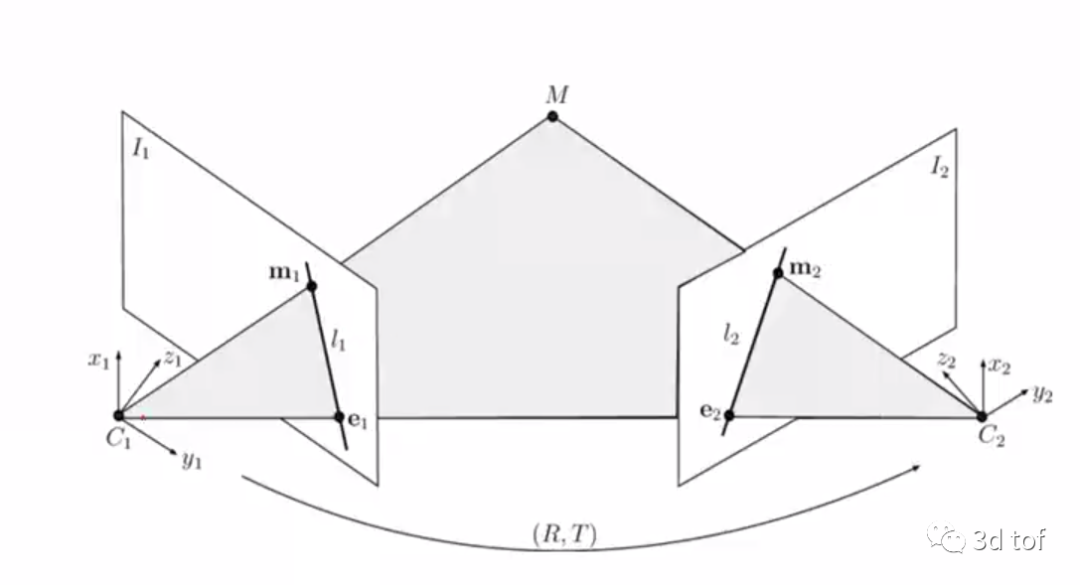
極線約束
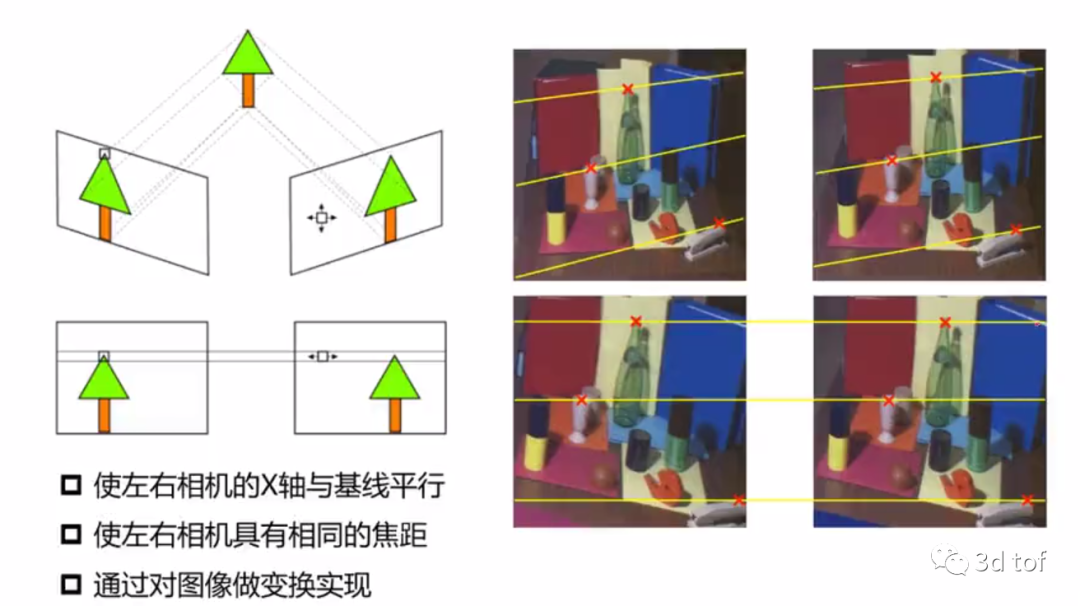
極線校正
雙目立體匹配原理及應(yīng)用
上世紀(jì)的60年代中期。美國MIT的Lawrence Roberts通過從數(shù)字圖像中提取立方體、楔形體和棱柱體等簡單規(guī)則多面體的三維結(jié)構(gòu),并對物體的形狀和空間關(guān)系進(jìn)行描述,把過去的簡單二維圖像分析推廣到了復(fù)雜的三維場景,標(biāo)志著立體視覺技術(shù)的誕生。隨著研究的深入,研究的范圍從邊緣、角點(diǎn)等特征的提取,線條、平面、曲面等幾何要素的分析,直到對圖像明暗、紋理、運(yùn)動和成像幾何等進(jìn)行分析,并建立起各種數(shù)據(jù)結(jié)構(gòu)和推理規(guī)則。特別是在1982年,David Marr首次將圖像處理、心理物理學(xué)、神經(jīng)生理學(xué)和臨床精神病學(xué)的研究成果從信息處理的角度進(jìn)行概括,創(chuàng)立了視覺計算理論框架。這一基本理論對立體視覺技術(shù)的發(fā)展產(chǎn)生了極大的推動作用,在這一領(lǐng)域已形成了從圖像的獲取到最終的三維場景可視表面重構(gòu)的完整體系,使得立體視覺已成為計算機(jī)視覺中一個非常重要的分支。
完整的雙目立體視覺系統(tǒng)通常可分為數(shù)字圖像采集、相機(jī)標(biāo)定、圖像預(yù)處理與特征提取、圖像校正、立體匹配、三維重建六大部分。雙目立體成像法具有高3D成像分辨率、高精度、高抗強(qiáng)光干擾等優(yōu)勢,而且可以保持低成本。但是需要通過大量的CPU/ASIC演算取得它的深度和幅度信息其算法極為復(fù)雜較難實(shí)現(xiàn),同時該技術(shù)易受環(huán)境因素干擾,對環(huán)境光照強(qiáng)度比較敏感,且比較依賴圖像本身的特征,因而拍攝暗光場景時表現(xiàn)差。
3、結(jié)構(gòu)光法(Structured Light)
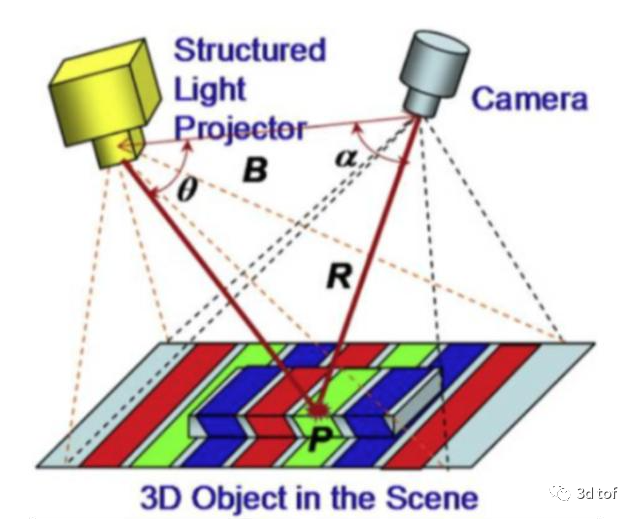
近紅外激光器,將具有已知的結(jié)構(gòu)特征(比如離散光斑、條紋光、編碼結(jié)構(gòu)光等)的光線投射到被拍攝物體上,再由專門的紅外攝像頭進(jìn)行采集三維物體物理表面成像的畸變情況,再通過觀測圖案與原始圖案之前發(fā)生的形變由此來得到圖案上的各個像素的視差。這個技術(shù)通過光學(xué)手段獲取被拍攝物體的三維結(jié)構(gòu),再將獲取到的信息進(jìn)行更深入的應(yīng)用。其工作原理可看作是另一種雙目法,紅外激光器和紅外攝像頭可當(dāng)做是雙目立體視覺法中的左右雙目的觀測原理。
微軟與以色列3D感測公司 PrimeSense合作發(fā)布了搭載結(jié)構(gòu)光模組的體感設(shè)備Kinect一代,2010年11月上市后,該產(chǎn)品成為 2011 年銷售最快的消費(fèi)電子設(shè)備。盡管產(chǎn)品大獲成功,但第一代 Kinect 的準(zhǔn)確度、圖像分辨率和響應(yīng)速度并不理想。2017年蘋果發(fā)布iPhone X,首次搭載 3D 結(jié)構(gòu)光模組,可實(shí)現(xiàn)3D人臉識別技術(shù),成為蘋果近幾年最大的創(chuàng)新。主要結(jié)構(gòu)光方案廠商還有美國的英特爾、高通/Himax,以色列 Mantis Vision 以及國內(nèi)華為、奧比中光等公司。
結(jié)構(gòu)光的紅外激光器發(fā)射出了光,可以照亮被掃描物體,所以它不需要像雙目結(jié)構(gòu)一樣依賴于光源,而且在較平整,沒有圖案的物體表面也可以測算出物體的三維深度
4 飛行時間法介紹(Time of Flight)
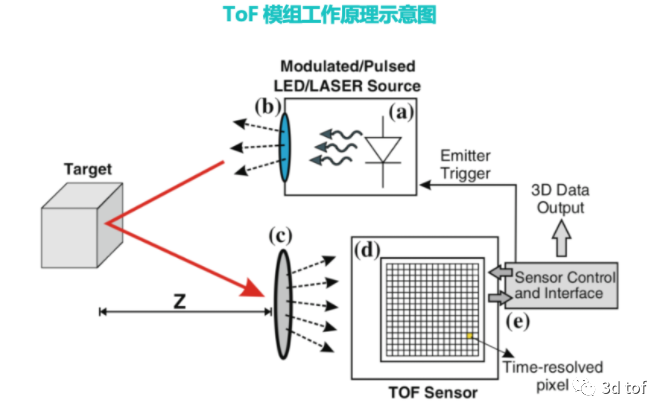
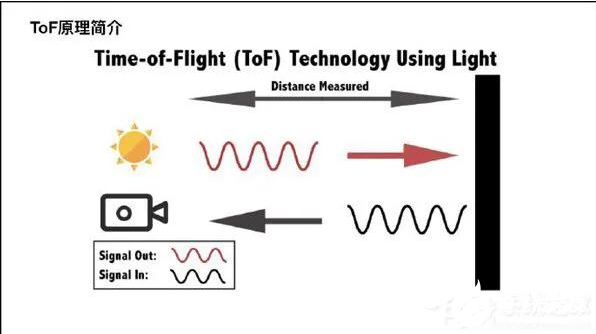
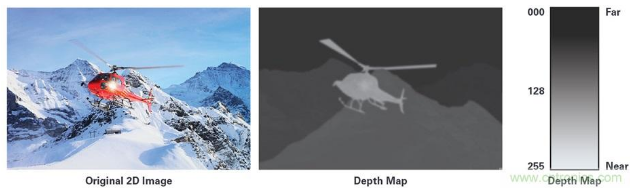
飛行時間,通過給目標(biāo)連續(xù)發(fā)送光脈沖,然后用傳感器接收從物體返回的光,通過探測這些發(fā)射和接收光脈沖的飛行(往返)時間來得到目標(biāo)物距離。傳感器通過計算光線發(fā)射和反射時間差或相位差,來換算被拍攝景物的距離,以產(chǎn)生深度信息,此外再結(jié)合傳統(tǒng)的相機(jī)拍攝,就能將物體的三維輪廓以不同顏色代表不同距離的地形圖方式呈現(xiàn)出來。
2006 年 7 月,衍生自CSEM(瑞士電子與微技術(shù)中心)的 MESA Imaging公司成立,并推出商用ToF攝像頭產(chǎn)品系列 SwissRanger,最開始應(yīng)用于汽車的被動安全檢測。ToF技術(shù)首次應(yīng)用到智能手機(jī)是在 2016 年,Google 和聯(lián)想合作推出了全球首個搭載ToF模組的智能手機(jī) Phab2 Pro,采用的是pmd/英飛凌的ToF方案,該手機(jī)可實(shí)現(xiàn)一些如三維測量等簡易的 AR 應(yīng)用,但并沒有引起市場較大的反響。2018年8月6日,OPPO 在北京召開了ToF技術(shù)溝通會, 并在8月23日發(fā)布了其首部搭載 ToF 攝像頭的智能手機(jī) OPPO R17 Pro,采用了 Sony 的解決方案。隨后在 2018 年 12 月,vivo 發(fā)布了其首部搭載 ToF 攝像頭的智能手機(jī) vivo NEX 雙屏版,采用了松下的解決方案; 華為發(fā)布了其首部搭載 ToF 攝像頭模組的智能手機(jī)榮耀 V20,采用的是 OPPO R17 Pro 相同的 ToF方案。進(jìn)入 2019 年后,安卓廠商紛紛加入 ToF 鏡頭的陣營。
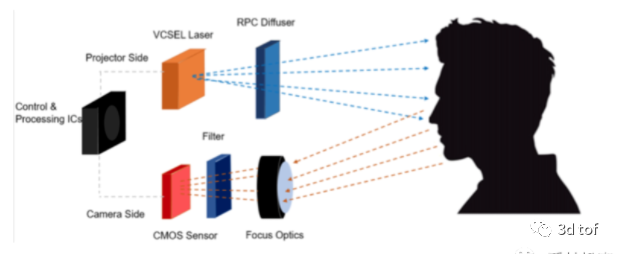
它包含幾個構(gòu)建塊:(a)脈沖/調(diào)制光源(在ToF中一般使用VCSEL,請見下文解釋)(b)光學(xué)擴(kuò)散片將光擴(kuò)散傳播出去,接著當(dāng)光從物體上反射回來時,用(c)一組透鏡收集從物體上折射回來的光。接著經(jīng)過一個濾光片將折射回來的光收集起來并且適當(dāng)?shù)卣{(diào)整光源的波長,接著通過改善背景噪聲抑制令光波可被芯片所識別。最后,測量系統(tǒng)的核心是由固態(tài)量程圖像傳感器(d),由一組光探測器(像素)組成,能夠直接或間接地測量光脈沖從光源到目標(biāo)并返回傳感器所需的飛行時間。該系統(tǒng)還需要一個合適的傳感器接口,為傳感器提供電源、所需的偏置電壓/電流信號、數(shù)字控制相位,并從傳感器讀取數(shù)據(jù)流,這通常需要進(jìn)一步的小處理以獲得3D體積數(shù)據(jù)。最后,傳感器接口負(fù)責(zé)與外部(到PC或處理單元)的通信。
ToF 技術(shù)具有以下的優(yōu)點(diǎn):1、軟件復(fù)雜性低,設(shè)計與應(yīng)用簡單 2、在暗光與強(qiáng)光環(huán)境下表現(xiàn)不錯 3、功耗不高 4、有較遠(yuǎn)的探測距離 5、成本低 6、響應(yīng)速度快,缺點(diǎn)則在于室外受自然光紅外線影響大、遠(yuǎn)距離無法保證精度。
D-ToF 在經(jīng)典的飛行時間測量中,直接飛行時間(Direct ToF,D-ToF,下文稱為D-ToF)的原理比較直接,即直接發(fā)射一個光脈沖,之后測量反射光脈沖和發(fā)射光脈沖之間的時間間隔,就可以得到光的飛行時間。探測器系統(tǒng)在發(fā)射光脈沖產(chǎn)生的同時啟動一個高精度的秒表。當(dāng)探測到目標(biāo)發(fā)出的光回波時,秒表停止并直接存儲往返時間。目標(biāo)距離z可通過以下簡單方程估算:
其中
表示光在空氣中傳播的速度。D-ToF通常用于單點(diǎn)測距系統(tǒng),但由于像素級亞納秒電子秒表的實(shí)現(xiàn)困難,D-ToF的成本以及技術(shù)難度相較于I-ToF更高。這項(xiàng)技術(shù)特別適用于基于SPAD的ToF系統(tǒng)。目前主流的主流的ToF技術(shù)所采用的SPAD(single- photon avalanche diode,單光子雪崩二極管)是一種高靈敏度的半導(dǎo)體光電檢測器,其被廣泛運(yùn)用于弱光信號檢測領(lǐng)域。結(jié)合D-ToF技術(shù),可用來精確檢測記錄光子的時間和空間信息,繼而通過三維重極算法進(jìn)行場景的三維重構(gòu)。蘋果在2020年發(fā)布的第四代iPad Pro中就運(yùn)用到了D-ToF技術(shù)。D-ToF的原理看起來雖然很簡單,但是實(shí)際能達(dá)到較高的精度很困難而且成本對比I-ToF要高很多。除了對時鐘同步有非常高的精度要求以外,還對脈沖信號的精度有很高的要求。普通的光電二極管難以滿足這樣的需求。而D-ToF中的核心組件SPAD由于制作工藝復(fù)雜,能勝任生產(chǎn)任務(wù)的廠家并不多,并且集成困難。所以目前研究D-ToF的廠家并不多,更多的是在研究和推動I-ToF。

I-ToF(Indirect ToF,I-ToF,下文稱為I-ToF) D-ToF的另一種解決方案是所謂的間接ToF(Indirect ToF,I-ToF,下文稱為I-ToF),而I-ToF的原理則要復(fù)雜一些。在I-ToF中,發(fā)射的并非一個光脈沖,而是調(diào)制過的光。接收到的反射調(diào)制光和發(fā)射的調(diào)制光之間存在一個相位差,通過檢測該相位差就能測量出飛行時間,從而估計出距離。其中往返行程時間是從光強(qiáng)度的時間選通測量中間接外推的。在這種情況下,不需要精確的秒表,而是需要時間選通光子計數(shù)器或電荷積分器,它們可以在像素級實(shí)現(xiàn),只需較少的計算工作和硅面積。I-ToF是基于ToF相機(jī)的電子和照片混合設(shè)備的自然解決方案。

1、ToF產(chǎn)業(yè)鏈介紹 3D傳感產(chǎn)業(yè)生態(tài)鏈包括光源、光學(xué)單元(透鏡及濾光片等)、圖像傳感器及模組制造等直接硬件環(huán)節(jié),此外還包括軟件、處理器、3D系統(tǒng)設(shè)計等。
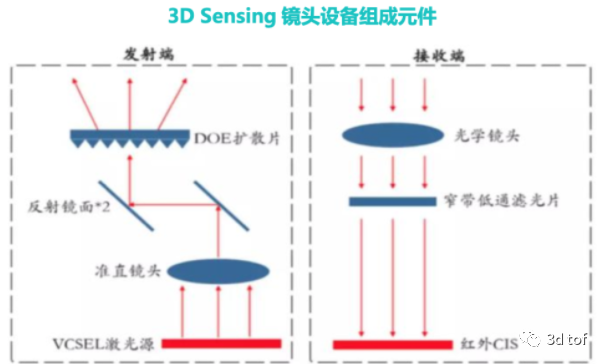
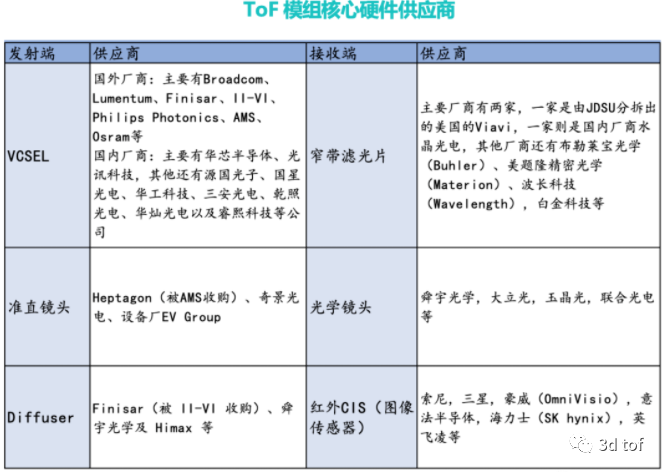
2、ToF鏡頭組成核心硬件
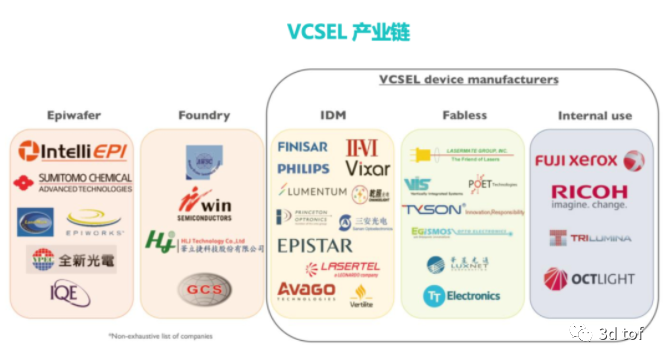
VCSEL 是 3D Sensing 中重要的部件之一,不僅體現(xiàn)在其功能在體現(xiàn)在其價值量之中。隨著 3D Sensing 在手機(jī)中進(jìn)一步滲透,VCSEL 的市場規(guī)模將隨之?dāng)U大。ToF不僅可以在手機(jī)中使用,還可以在光通訊、激光雷達(dá)等多個領(lǐng)域中使用,市場空間巨大。據(jù)市場研究機(jī)構(gòu) Yole 預(yù)測,到 2023 年,整個 VCSEL 市場將達(dá)到 35 億美元,年復(fù)合增長率達(dá)到 48%。VCSEL 領(lǐng)域具有市場大、增長快、應(yīng)用廣等特點(diǎn),未來對 VCSEL 的關(guān)注度將會日漸提升。從圖中可看出未來在VCSEL賽道,主要集中的領(lǐng)域是消費(fèi)電子、工業(yè)領(lǐng)域以及通信。VCSEL 是化合物半導(dǎo)體激光器,因此對應(yīng)化合物半導(dǎo)體產(chǎn)業(yè)鏈,包括晶圓、外延片(EPI)、IC 設(shè)計、晶圓代工和封測等環(huán)節(jié)。
準(zhǔn)直鏡頭 利用光的折射原理,將波瓣較寬的衍射圖案校準(zhǔn)匯聚為窄波瓣的近似平行光。采用準(zhǔn)直鏡頭對 VCSEL 出射光束進(jìn)行準(zhǔn)直、形成散斑等整形處理。WLO(Wafer-level Optics,在下文稱為WLO)晶圓級光學(xué)器件,是指晶圓級鏡頭制造技術(shù)和工藝。與傳統(tǒng)光學(xué)器件的加工技術(shù)不同,WLO工藝在整片玻璃晶圓上,用半導(dǎo)體工藝批量復(fù)制加工鏡頭,多個鏡頭晶圓壓合在一起,然后切割成單顆鏡頭,具有尺寸小、高度低、一致性好等特點(diǎn)。
DOE擴(kuò)散片 DOE衍射光學(xué)元件(Diffractive Optical Elements,在下文稱為DOE)在3D攝像頭結(jié)構(gòu)光方案中的作用就是利用光的衍射原理,將激光器的點(diǎn)光源轉(zhuǎn)換為散斑圖案(pattern)。首先根據(jù)特定衍射圖像的光學(xué)需求,設(shè)計并制作出三維母模,然后根據(jù)母模再制作出DOE光柵,光柵表面具有三維的微結(jié)構(gòu)圖案,尺寸都在微米級別。激光器發(fā)射的線性激光通過DOE的時候發(fā)生衍射,衍射光的角度和數(shù)量是受DOE上pattern的控制,衍射出來的光斑具備lighting code信息。DOE主要是用于結(jié)構(gòu)光成像技術(shù)的攝像頭中,DOE的制造成本相對較高。
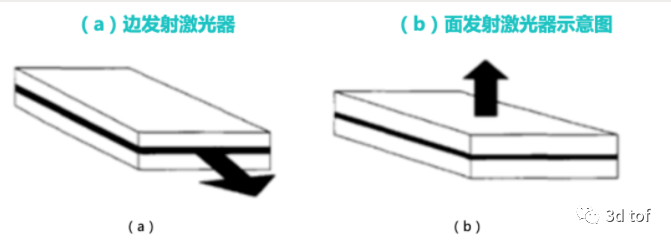
發(fā)光單元 ToF鏡頭的發(fā)光單元通常為能發(fā)出特定波長紅外線的垂直腔面發(fā)射激光器(Vertical-Cavity Surface-Emitting Laser,又譯垂直共振腔面射型激光,在下文稱VCSEL),VCSEL能以相對較小功率發(fā)射出較高的信號。VCSEL是一種半導(dǎo)體,其激光垂直于頂面射出,與一般用切開的獨(dú)立芯片制成,激光由邊緣射出的邊射型激光有所不同。傳統(tǒng)的光電轉(zhuǎn)換技術(shù)一般是用的LED等發(fā)光器件,這種發(fā)光器多采用的是邊緣發(fā)射,缺點(diǎn)是體積較大,所以會比較難于半導(dǎo)體技術(shù)相結(jié)合。20世紀(jì)90年代垂直腔表面發(fā)射激光VCSEL技術(shù)成熟后,解決了發(fā)光器件和半導(dǎo)體技術(shù)結(jié)合的問題,因此迅速得到普及。VCSEL是很有發(fā)展前景的新型光電器件,也是光通信中革命性的光發(fā)射器件。此外,ToF中泛光照明器的VCSEL輸出光束無需經(jīng)過編碼,因此器件制作上更為簡單,可供選擇的 VCSEL 供應(yīng)商也更多。顧名思義,邊發(fā)射激光器是沿平行于襯底表面、垂直于解理面的方向出射,而面發(fā)射激光器其出光方向垂直于襯底表面,如下圖:
在ToF的發(fā)射成像技術(shù)中主要運(yùn)用的是擴(kuò)散板(在下文稱為Diffuser),主要是為顯示器提供一個均勻的面光源,ToF投射器主要包括VCSEL + Diffuser,而ToF的VCSEL并不像結(jié)構(gòu)光那樣對編碼圖案有一定要求,只是最常規(guī)的規(guī)則排列,器件制作上更為簡單,裝配精度要求也更低。Diffuser是DOE的一種,也屬于波束整形器,用于對輸入光束進(jìn)行均一化,通過使較大折射角處具有更大屈光度,使得較窄的光束擴(kuò)展到更寬的角度范圍內(nèi),并具備均勻的照明場。TOF 中的 Diffuser 的設(shè)計制作難度,比 3D 結(jié)構(gòu)光點(diǎn)陣投影儀中的 DOE 要簡單很多。
根據(jù)光大證券測算,考慮到疫情影響預(yù)計2020年全球智能機(jī)出貨量有所下降,滯后的 5G 需求有望在2021年釋放,預(yù)計 20~21 年全球智能機(jī)出貨量分別為 12.6/15.0 億部,其中 iphone 出貨量 1.7/2.1 億部,安卓機(jī) 10.9/12.9 億部。假設(shè) 20~21 年前置結(jié)構(gòu)光在 iphone 的滲透率分別為92%/95%,在安卓的滲透2%/5%,推算結(jié)構(gòu)光攝像頭出貨量 1.8/2.7 億顆。假設(shè) 20~21 年后置 TOF 在 iphone 的滲透率分別為 25%/50%,在安卓的滲透率 7%/15%,加上 ipad 出貨量,推算后置 TOF 攝像頭出貨量 2.7/4.4 億顆。假定DOE/Diffuser單價1美元測算,對應(yīng)DOE 20~21年市場規(guī)模1.8/2.7億美元;Diffuser市場規(guī)模 2.7/4.4 億美元;窄帶濾光片按 20~21 年單價 1/0.75 美元測算,對應(yīng)市場規(guī)模 9/10.5 億美元。
接收端 窄帶濾光片和光學(xué)鏡頭:
ToF模組依靠窄帶濾光片和光學(xué)鏡頭來收集反射回的光線。濾光片只允許對應(yīng)波長的紅外線通過,抑制其他光線,并降低噪聲。近紅外識別系統(tǒng)中所用到的窄帶濾光片及超薄高性能鍍膜也是基于結(jié)構(gòu)光及ToF的3D攝像頭技術(shù)關(guān)鍵。3D攝像頭在接收反射光時要求只有特定波長的光線能夠穿過鏡頭,攔截頻率帶之外的光線,即隔離干擾光、通過信號光凸顯有用信息,因此需要濾光片在接收端過濾掉非工作波段的光波。
在窄帶濾光片賽道,難度和價值量都高于傳統(tǒng)攝像頭所用的濾光片,目前僅有 VIAVI 和水晶光電的技術(shù)較為成熟,這兩家也是蘋果iPhone X的窄帶濾光片供應(yīng)商。目前全球僅水晶光電和唯亞威(Viavi)兩家企業(yè)具備大批量供貨的能力。
接收端:紅外CIS(下文稱為圖像傳感器):
早年的ToF傳感器,多采用CCD(Charge-coupled Device,中文為電荷耦合元件,是一種圖像傳感器,下面簡稱CCD),而CMOS是另一種目前市場上更為主流的圖像傳感器(Complementary Metal Oxide Semiconductor,互補(bǔ)金屬氧化物半導(dǎo)體,在下文簡稱CMOS)。CCD的感光利用率更高,但是功耗十分大,發(fā)熱嚴(yán)重,也是此前ToF方案未能應(yīng)用在手機(jī)中的原因之一。隨著圖像傳感器廠商不斷提高CMOS傳感器的技術(shù),通過背照式(Backside Illumination,在下文簡稱BIS)設(shè)計、電流輔助光子演示(CPAD)技術(shù),并將高速率多幀圖像合成單張圖像用以計算最終的深度,在降低圖像噪聲的同時降低了功耗,從而使ToF應(yīng)用于手機(jī)成為可能,但對應(yīng)的ToF傳感器芯片成本也高出很多。
CMOS圖像傳感器市場集中度較高,2017年,前十大廠商市場份額合為94%,其中前三家廠商索尼(Sony)、三星(Samsung)、豪威科(Omnivision)市場份額合計占比達(dá)73%,CR3較2014年的63%有明顯提升。從CIS市場增速來看,根據(jù)IC Insights2018年預(yù)測,2017-2022年銷售額CAGR為8.8%,銷售量CAGR為11.7%;根據(jù)Yole2018年預(yù)測,2017-2023年銷售額CAGR為9.4%,而該機(jī)構(gòu)最新預(yù)測顯示,受到新冠肺炎疫情影響,2020年增速將回落至7%,2021年略有反彈(增速為12%),預(yù)計2025年CIS市場規(guī)模將達(dá)到280億美元。
未來可能是sensor市場的一個驅(qū)動引擎,可以應(yīng)用在自動駕駛、醫(yī)療檢測和物體識別等多種新興領(lǐng)域。未來幾年,ToF技術(shù)將在終端迎來高速增長。隨著ToF技術(shù)的不斷成熟和應(yīng)用場景的不斷豐富,手機(jī)攝像頭、手勢交互UI(用戶界面)、汽車電子ADAS、安防監(jiān)控等多個領(lǐng)域,對ToF深度傳感器的數(shù)量需求都將大幅增長。
編輯:黃飛
?











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論