 電子發燒友App
電子發燒友App


現在各大車企在智能輔助駕駛方面宣傳尤為看種,不少的用戶也是從中得知了攝像頭、毫米波雷達、激光雷達等名詞,但其實際怎么運轉,有何作用,又有什么優劣,大家也是一無所知,今天梳理如下:
目前汽車中使用的傳感器主要是雷達、LiDAR和攝像頭。它們各有長短,用處不同。這些傳感器協同工作,提供外部世界車輛、行人、騎自行車的人、標志等原始數據,其重疊功能會產生冗余(圖中顏色重疊部分),確保一個系統出現故障時,另一個系統繼續運行。
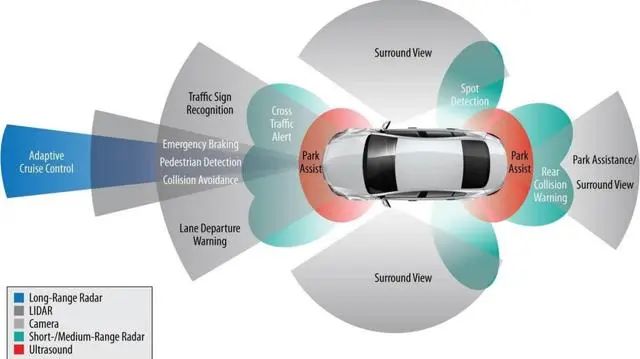
ADAS完整愿景將融合多種RF技術和立體視覺等傳感器,形成一個完整的360°數字處理環境。
01
毫米波雷達
毫米波雷達是一種使用毫米波段進行測距、探測、跟蹤、成像的主動傳感器。它可主動發射電磁波,穿透煙塵,幾乎不受光線和天氣影響,幫助車輛實時感知周圍物體并提供較為準確的距離和速度信息。
毫米波雷達里,77GHZ毫米波雷達是智能汽車上必不可少的關鍵部件,是能夠在全天候場景下快速感知0-200米范圍內周邊環境物體距離、速度、方位角等信息的傳感器件。那么它是如何計算被監測目標的位置、速度和方向的呢?
?
1、位置
毫米波雷達通過發射天線發出相應波段的有指向性的毫米波,當毫米波遇到障礙目標后反射回來,通過接收天線接收反射回來的毫米波。根據毫米波的波段,通過公式計算毫米波在途中飛行的時間&TImes;光速÷2,再結合前車行駛速度和本車的行駛速度因素,就可以知道毫米波雷達(本車)和目標之間的相對距離了,同時也就知道目標的位置。
2、速度
此外,根據多普勒效應,毫米波雷達的頻率變化、本車及跟蹤目標的相對速度是緊密相關的,根據反射回來的毫米波頻率的變化,可以得知前方實時跟蹤的障礙物目標和本車相比的相對運動速度。因此,表現出來就是,傳感器發出安全距離報警時,若本車繼續加速、或前監測目標減速、或前監測目標靜止的情況下,毫米波反射回波的頻率將會越來越高,反之則頻率越來越低。
3、方位角
關于被監測目標的方位角測量問題,毫米雷達的探測原理是:通過毫米波雷達的發射天線發射出毫米波后,遇到被監測物體,反射回來,通過毫米波雷達并列的接收天線,通過收到同一監測目標反射回來的毫米波的相位差,就可以計算出被監測目標的方位角了。原理圖如下:
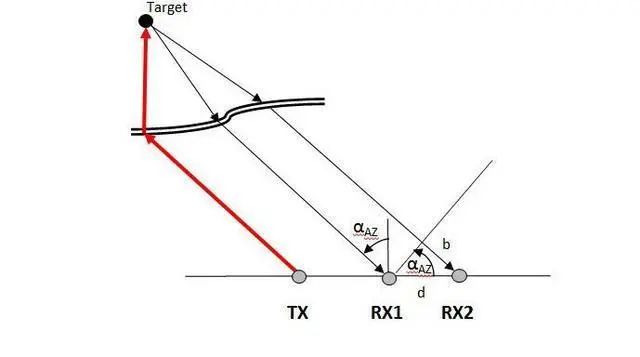
方位角αAZ是通過毫米波雷達接收天線RX1和接收天線RX2之間的幾何距離d,以及兩根毫米波雷達天線所收到反射回波的相位差b,然后通過三角函數計算得到方位角αAZ的值,這樣就可以知道被監測目標的方位角了。
位置、速度和方位角監測是毫米波雷達擅長之處,再結合毫米波雷達較強的抗干擾能力,可以全天候全天時穩定工作,因此毫米波雷達被選為汽車核心傳感技術。
但是,毫米波雷達的感知精度并不理想,不具備圖像級的成像能力。因為毫米波雷達是利用在目標物體表面的反射、漫反射和散射來進行目標檢測和跟蹤,所以對于像行人、動物、自行車這一類低反射率的目標,探測準確度也會大打折扣,路面上的靜態物體也可能被當成雜波過濾掉了。
另外,4D毫米波雷達其實也是毫米波雷達的一種,并非什么新物種。相比傳統 3D 毫米波雷達而言,4D 毫米波多加了一個高度信息,但是分辨率相比激光雷達來說還是有很大差距。
目前市場上的4D 毫米波雷達每幀約輸出 1000 多點,而一個 128 線激光雷達每幀輸出可達十幾萬點,二者輸出的數據量相差了 2 個數量級之多。
02
激光雷達
激光雷達也是一種主動傳感器,最常見的ToF (Time of Flight) 測距法,就是通過主動發射激光光束,并測量他們與周圍物體反射往返的時間來確定距離和位置。激光雷達通過向外界發出每秒數百萬個激光點,可以獲取到這些點的三維定位信息,清晰呈現出行人、斑馬線、車輛、樹木等物體細節,達到圖像級分辨率。而且,激光點越密集,分辨率就越高,越能完整且清晰地重構真實世界。
由于其“主動發光”的特性,激光雷達受周圍環境光線變化的影響非常小,在一片漆黑的夜間環境也能夠“精準洞察”。此外,激光雷達能夠直接獲取到物體的體積和距離,不像攝像頭要靠“猜”,因此針對小型、異形障礙物的檢測,應對近距離加塞、隧道、車庫等復雜場景,都會有更好的發揮。不過,激光雷達的性能在大雨、雪、霧等極端天氣下也會受到一定程度的影響。
?
真實點云圖
LiDAR是通過多個旋轉(物理或通過邏輯)的激光器來實現的,以360度視野掃描車輛周圍環境。在自動駕駛發展史上,LiDAR一直是一項重要的傳感技術。開創性的自動駕駛原型依靠LiDAR實現了精確的距離測量、可靠性和易用性。
例如,2004年開始的由美國國防部高級研究計劃局(DARPA)贊助的自動駕駛挑戰賽中,大多數參賽者都依賴LiDAR技術。LiDAR沒有辜負人們的期望,優勢顯而易見,包括:
高精度(測量精度達到厘米級)
高數據速率(機械式旋轉LiDAR每秒旋轉20轉以上)
經驗證穩定可靠
感測效果不受溫度和光照的影響
盡管LiDAR有諸多優點,但也確實有一定的技術局限性:
在雨、霧和灰塵等惡劣天氣條件下會因反射造成誤報。專用算法處理可能解決這些問題,但比較復雜
眼睛安全條例對LiDAR的信號強度有所限制,使分辨率限制了視場和視場之間的距離
LiDAR測量的有效性與物體的反射率有關。如果信號遇到反射性差的障礙物,如黑色車輛,信號的能量只返回很小一部分,因此感測的可靠性會降低。幸運的是,大多數交通參與者都有足夠的反射能力,所以LiDAR在的應用相當廣泛。
03 攝像頭
攝像頭是最常見的汽車傳感器,裝在車身四周可以從多角度捕捉環境圖像,在90 年代就已開始進入商用并逐漸普及。它也是最接近人眼的傳感器,能夠獲取到豐富的色彩和細節信息,比如車道線,指示標志,紅綠燈等等。
攝像頭單目測距原理及實現:
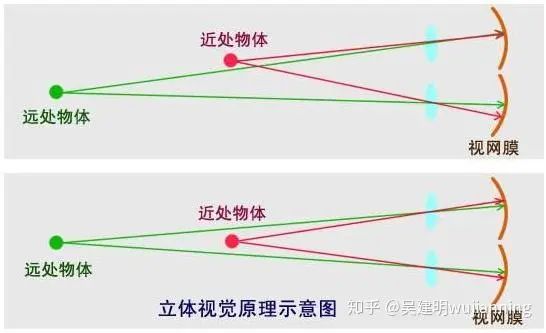
人的眼睛長在頭部的前方,兩只眼的視野范圍重疊,兩眼同時看某一物體時,產生的視覺稱為雙眼視覺。雙眼視覺的優點是可以彌補單眼視野中的盲區缺損,擴大視野,并產生立體視覺。也就是說,假如只有一只眼睛,失去立體視覺后,人判斷距離的能力將會下降。這也就是單目失明的人不能考取駕照的原因。
單純的單目視覺測距,必須已知一個確定的長度。
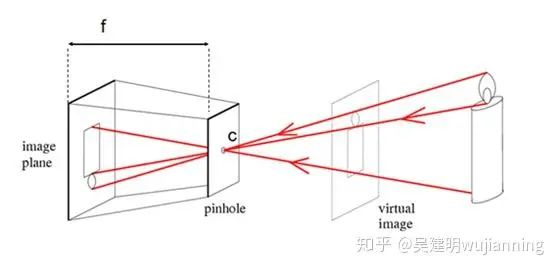
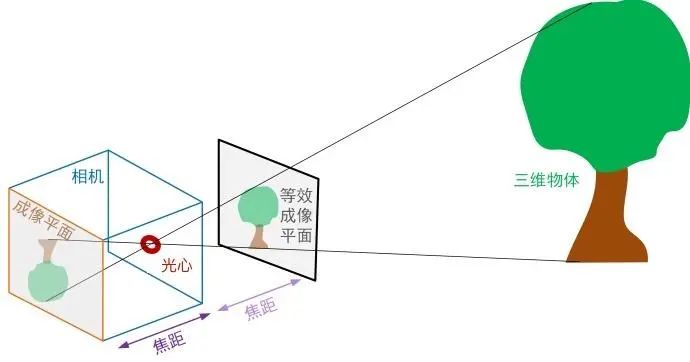
f為攝像頭的焦距,c為鏡頭光心。物體發出的光經過相機的光心,然后成像于圖像傳感器或者也可以說是像平面上,如果設物體所在平面與相機平面的距離為d,物體實際高度為H,在傳感器上的高度為h,H一定要是已知的,我們才能求得距離d。
下面的相機焦距f并不是透鏡的焦距,而是焦距+z0,這個我們必須要清楚。因為成像是在像平面,并不是成像在焦平面,焦平面的距離才是f,但是我們下面的模型不需要知道實際的f,所以就使用了像平面的距離焦距f+z0作為相機焦距f。
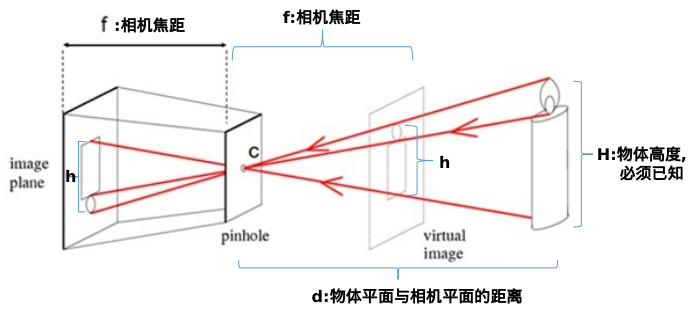
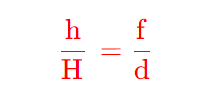
由相似三角形,可以得到:
同時,攝像頭其局限性也非常明顯,如果遇到會暗光、逆光等影響“視線”的情況,攝像頭也會像人眼一樣看不清從而丟失目標。
第一步,求相機焦距:
對于蠟燭,我們可以:
1.測量蠟燭的高度?H?作為先驗知識;
2.測量蠟燭到相機光心的距離?d;
3.通過相機拍攝的這一幀蠟燭圖像,可以得到蠟燭在圖像中的高度所占像素個數?h?;
知道三個量,就可以求出相機的焦距f,即:
需要注意,相機的焦距是個固定值,只要使用該方法求出焦距后,以后就不用再求了。但是,可能需要多次測量求平均值。
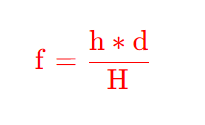
第二步,求物體距離相機的實際距離:
得到了相機焦距f?,對于放在其他位置的任意物體,就可以根據:
1.該物體的先驗值高度?H?;
2.統計出該物體在該幀圖像中的高度所占像素個數?h?;
3.前面求出來的相機焦距固定值?f?;
得到物體距離相機的實際距離d?:
 出隧道時的逆光可能會讓攝像頭“致盲”
出隧道時的逆光可能會讓攝像頭“致盲”
同時,視覺感知技術的核心在于通過軟件算法去解析高密度的信息,也就是通過“識別”這些物體并“估測”它們的距離。如果遇到一些“不認識”的物體,比如道路上的異形障礙物等,可能會因為無法全面而準確地感知,從而導致系統做出錯誤的決策。
也正因如此,僅基于攝像頭的智能駕駛方案大多停留在L2 階段,涉及 L3 級別以上的自動駕駛功能仍存在許多 corner case 無法完美解決。這時,就需要其他傳感器來進行“互補”。
04
雷達、LiDAR和攝像頭孰優孰劣?
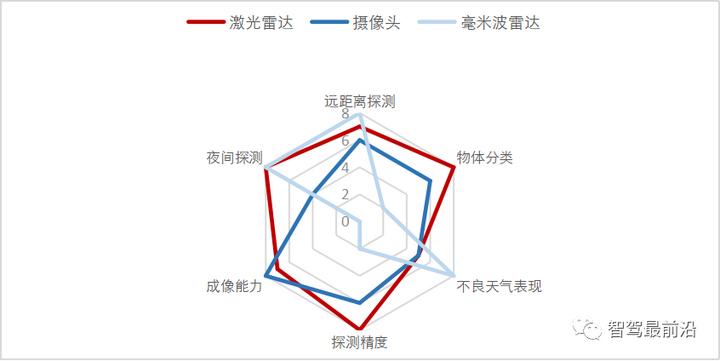
其實攝像頭、毫米波雷達、激光雷達這三種智能汽車上最常見的傳感器,各有優缺點。但三個傳感器疊加在一起,就能發揮更大的作用。
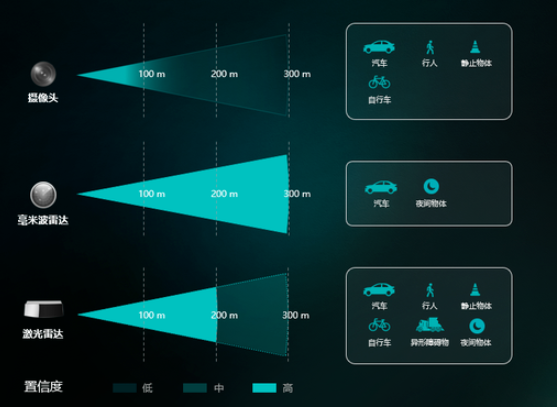
攝像頭是被動傳感器,能識別豐富的色彩信息,但受光線影響顯著,在一些光線不好的環境下置信度相對較低。毫米波雷達的置信度高,但因分辨率較低,能夠識別出的物體類型較少,無法有效感知行人、自行車或更小的物體。激光雷達不論是從測距能力、置信度、可感知物體細節,綜合實力都很出色,可能最大的缺點,就是有點“貴”。
但毫無疑問的是,激光雷達的成本正在迅速降低,越來越多的汽車廠商已經將激光雷達集成至了量產車型中,提升智能駕駛系統的安全性與舒適性。隨著芯片化技術在不斷進化,激光雷達的元器件數量已大幅減少,而且自動化產線的效率上升,也有助于生產成本的下降。激光雷達已經從幾年前的百萬元級別,降至了目前的幾千元級別,成為普通消費者也能用上的“汽車黑科技”。
最后回歸到用戶需求,一個智能駕駛系統是不是“好用”,還是用戶說了算。在感知層面,傳感器各有長短版,如何讓它們更好地“各司其職”,發揮各自最大的優勢才是關鍵。隨著智能駕駛軟件能力的不斷迭代,相信未來也會逐漸“解鎖”更多的硬件潛力,進而賦予消費者更絲滑、更舒適的智駕體驗。
編輯:黃飛
?










 工商網監
工商網監
評論