LiDAR測(cè)距應(yīng)用越來越普及,例如行人檢測(cè)、車輛檢測(cè)、障礙物探測(cè)等自動(dòng)駕駛應(yīng)用,以及道閘防砸、高度計(jì)等。本項(xiàng)目以北醒TFMini-S Micro LiDAR傳感器為例,演示LiDAR傳感器與Arduino的連接,以及測(cè)距結(jié)果及顯示。本項(xiàng)目BOM如下:
2022-07-19 10:34:47 2710
2710 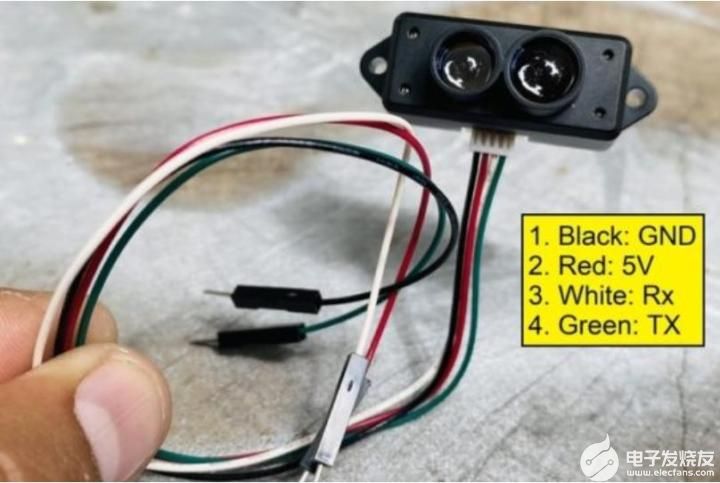
麥姆斯咨詢:由于全固態(tài)LiDAR內(nèi)部沒有任何宏觀或微觀上的運(yùn)動(dòng)部件,耐久性和可靠性的優(yōu)勢(shì)不言而喻,且順應(yīng)了自動(dòng)駕駛對(duì)LiDAR固態(tài)化、小型化和低成本化的趨勢(shì)。
2017-12-29 10:07:0112539 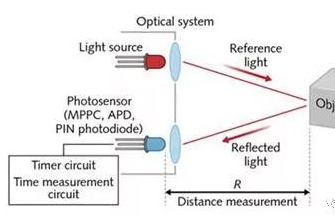
什么是光探測(cè)和測(cè)距 (LiDAR)?LiDAR 將雷達(dá)測(cè)距能力與相機(jī)的角分辨率相結(jié)合,提供準(zhǔn)確的深度感知傳感以完成圖像。
2022-02-06 07:54:0010374 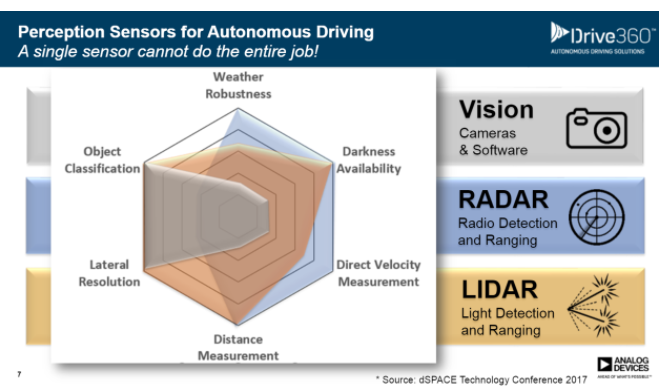
Contour2D傳感器系統(tǒng)能以最佳方式來有效檢測(cè)傳送帶的利用率。它是市場(chǎng)上唯一只需要一個(gè)LiDAR傳感器來執(zhí)行此操作的系統(tǒng)。R2000 LiDAR傳感器的獨(dú)特性能和智能算法能確保可靠的陰影校正
2022-06-13 19:15:191391 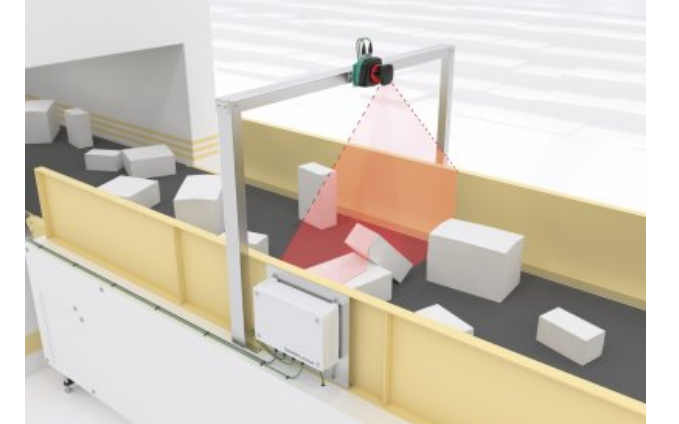
自動(dòng)駕駛的出現(xiàn)決定性地?cái)U(kuò)大了汽車電子平臺(tái)中激光成像檢測(cè)和測(cè)距 (LiDAR) 傳感器的存在。LiDAR 根據(jù)雷達(dá)原理工作,但使用紅外激光二極管發(fā)出的光脈沖。
2022-07-27 11:10:49844 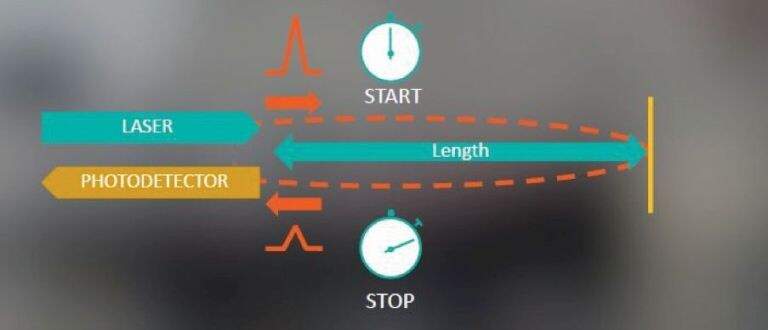
目前市場(chǎng)上最小、最輕的掃描LiDAR已經(jīng)開始由LightWare LiDAR LLC發(fā)貨。
2021-08-17 11:19:38906 
,RADAR伴隨著大量的被動(dòng)超聲波傳感器。然而,當(dāng)談到價(jià)格點(diǎn)時(shí),LIDAR仍然相對(duì)昂貴。對(duì)于想要親自動(dòng)手或開發(fā)的設(shè)計(jì)師,Digi-Key現(xiàn)在擁有SparkFun Electronics的SEN-14032
2018-10-30 14:30:22
本文探討ADI公司新推出且擁有廣泛市場(chǎng)的LIDAR原型制作平臺(tái),以及它如何通過提供完整的硬件和軟件解決方案,使得用戶能夠建立其算法和自定義硬件解決方案的原型,從而幫助客戶縮短產(chǎn)品開發(fā)時(shí)間;詳細(xì)介紹
2021-06-17 09:08:54
專為檢測(cè)過流情況而設(shè)計(jì)的 IC 有很多種,例如來自 Texas Instruments 的 INA300 電流檢測(cè)比較器。 INA300 工作電源為 5 V,但可以適應(yīng)高達(dá) 36 V 的共模電壓。過
2018-07-30 10:08:57
運(yùn)動(dòng)控制卡設(shè)置點(diǎn)位運(yùn)動(dòng)參數(shù)中平滑時(shí)間參數(shù)的作用是什么?
2022-04-26 11:46:41
運(yùn)動(dòng)控制和混合信號(hào)FPGA的知識(shí)點(diǎn),總結(jié)的太棒了
2021-05-10 06:07:23
運(yùn)動(dòng)控制系列:運(yùn)動(dòng)軸點(diǎn)動(dòng)控制【控制要求】觸摸屏上增加左右箭頭用來控制軸1點(diǎn)動(dòng),按住向左的箭頭電機(jī)轉(zhuǎn),松手就停。觸摸屏界面: 觸摸屏上添加位按鈕 點(diǎn)動(dòng)進(jìn)M1: Modbus地址 0x1001 點(diǎn)動(dòng)退
2019-07-18 14:46:31
在用加速度傳感器ADXL345測(cè)量落體運(yùn)動(dòng)時(shí),當(dāng)初速度為0自由落體時(shí),傳感器能夠正常檢測(cè)到。但是當(dāng)初速度不為0或者旋轉(zhuǎn)時(shí)再扔出去,傳感器ADXL345就無法檢測(cè)到落體運(yùn)動(dòng),請(qǐng)教如何解釋這一現(xiàn)象?如何解決?非常感謝,困擾我很長(zhǎng)時(shí)間了
2023-12-29 06:45:48
各位專家,我們公司的產(chǎn)品需要使用到運(yùn)動(dòng)檢測(cè)功能,但是現(xiàn)在卻不知道來如何使用這個(gè)功能。
1. 在web頁面中勾選Motion Detection,但是運(yùn)動(dòng)檢測(cè)線程沒有被正常執(zhí)行。
?
2. 強(qiáng)行
2018-06-21 14:44:57
手機(jī)、遙控器、個(gè)人導(dǎo)航系統(tǒng)等便攜設(shè)備的高精度手勢(shì)和運(yùn)動(dòng)檢測(cè)應(yīng)用創(chuàng)造新的應(yīng)用與市場(chǎng)機(jī)會(huì)。 MEMS運(yùn)動(dòng)傳感器為手機(jī)、便攜多媒體播放器、游戲機(jī)、個(gè)人導(dǎo)航系統(tǒng)和遠(yuǎn)程輸入設(shè)備增加本能式的人機(jī)界面,把用戶手腕
2018-11-14 16:36:40
該運(yùn)動(dòng)傳感器提供近距離傳感,覆蓋基于計(jì)算機(jī)視覺 (CV) 或LIDAR的解決方案的盲區(qū),適用于機(jī)器人和無人機(jī)TDK InvenSense ICM-42688-P 6軸運(yùn)動(dòng)跟蹤慣性測(cè)量單元 (IMU
2020-05-23 00:45:07
adxl345能否用于檢測(cè)沿Z軸方向做上下運(yùn)動(dòng)的加速度,X,Y軸保持水平不變,就Z軸上下直線運(yùn)動(dòng)。
2018-05-24 10:05:23
申請(qǐng)理由:學(xué)校運(yùn)動(dòng)環(huán)境檢測(cè),在學(xué)校操場(chǎng)設(shè)立監(jiān)測(cè)點(diǎn)。并實(shí)時(shí)反饋到電腦上,可以由學(xué)生通過微信查看操場(chǎng)環(huán)境,是否適合鍛煉,使得學(xué)生生活更加健康。項(xiàng)目描述:初步方案:在學(xué)校操場(chǎng)設(shè)立監(jiān)測(cè)點(diǎn)。并實(shí)時(shí)反饋到電腦上
2015-11-11 11:02:39
和 RS-LiDAR-Algorithms 感知算法三大部分組成。RS-Box 獨(dú)立運(yùn)行RS-LiDAR-Algorithms 點(diǎn)云感知算法,為自動(dòng)駕駛提供高精度實(shí)時(shí)定位、障礙物識(shí)別與分類、動(dòng)態(tài)物體跟蹤等
2017-12-15 14:20:48
針對(duì)變頻器輸出電流的檢測(cè)分為硬件過流檢測(cè)和軟件過流檢測(cè),硬件過流檢測(cè)是利用電流檢測(cè)電路實(shí)現(xiàn)輸出電流的檢測(cè),當(dāng)輸出電流超出整定時(shí),電平翻轉(zhuǎn)觸發(fā)過流。軟件過流的檢測(cè)是什么原理,也是根據(jù)輸出電流的檢測(cè)判斷的嗎,是否要結(jié)合母線的電壓波動(dòng),軟件檢測(cè)和硬件檢測(cè)哪個(gè)響應(yīng)更快?
2024-01-17 13:49:22
變頻器過流保護(hù)點(diǎn)測(cè)試測(cè)試說明:變頻器的過流保護(hù)點(diǎn)主要是用來防止出現(xiàn)變頻器輸出電流過大,導(dǎo)致模塊損壞的情況。具體根據(jù)不同系列的變頻器有不同的保護(hù)點(diǎn)。變頻器過流保護(hù)點(diǎn)分為軟件過流點(diǎn)和硬件過流點(diǎn)兩種
2018-04-04 10:21:25
變頻器過流保護(hù)點(diǎn)測(cè)試測(cè)試說明:變頻器的過流保護(hù)點(diǎn)主要是用來防止出現(xiàn)變頻器輸出電流過大,導(dǎo)致模塊損壞的情況。具體根據(jù)不同系列的變頻器有不同的保護(hù)點(diǎn)。變頻器過流保護(hù)點(diǎn)分為軟件過流點(diǎn)和硬件過流點(diǎn)兩種。此處
2018-04-08 09:19:31
如何利用高速ADC設(shè)計(jì)用于汽車的LIDAR系統(tǒng)?
2021-05-17 06:28:04
車輛的往返飛行時(shí)間(ToF)。當(dāng)知道脈沖通過空氣的速度時(shí),就可以計(jì)算出反射點(diǎn)的距離。這個(gè)脈沖可以是超聲波(聲納),也可以是無線電波(雷達(dá))或光(LiDAR)。 這三種ToF技術(shù),想擁有更高的角分辨率
2018-11-08 10:42:36
技術(shù)一樣,LiDAR使用激光來確定物體的距離,并且像使用相機(jī)和雷達(dá)圖像一樣,它可以使用卷積神經(jīng)網(wǎng)絡(luò)(CNN)檢測(cè)道路上的物體??。 區(qū)別在于,在LiDAR中,傳感器會(huì)生成具有數(shù)千個(gè)點(diǎn)的3D點(diǎn)云數(shù)據(jù)
2020-08-20 19:22:01
工業(yè)運(yùn)動(dòng)控制涵蓋一系列應(yīng)用,包括基于逆變器的風(fēng)扇或泵控制、具有更為復(fù)雜的交流驅(qū)動(dòng)控制的工廠自動(dòng)化以及高級(jí)自動(dòng)化應(yīng)用(如具有高級(jí)伺服控制的機(jī)器人)。這些系統(tǒng)需要檢測(cè)和反饋多個(gè)變量,例如電機(jī)繞組電流或
2019-08-08 07:02:47
通過審視五種運(yùn)動(dòng)檢測(cè)模式——加速度(包括平移運(yùn)動(dòng),如位置和方向)、振動(dòng)、沖擊、傾斜和旋轉(zhuǎn),各自的可能性,可以超越當(dāng)今大量MEMS應(yīng)用的范圍,極大地?cái)U(kuò)大應(yīng)用選項(xiàng)。MEMS加速度計(jì)和陀螺儀如何通過五類運(yùn)動(dòng)檢測(cè)實(shí)現(xiàn)各類最終產(chǎn)品的變革?接下來我們舉例來說明~
2019-07-30 07:47:02
我想做一個(gè)掃描軌跡,同時(shí)可以看清點(diǎn)的運(yùn)動(dòng)時(shí)的位置。例如:做一個(gè)圓形掃描,掃描一周需要10秒鐘,那么我想顯示任意時(shí)間,點(diǎn)的位置。求大神幫助指點(diǎn)。
2013-09-10 10:36:29
請(qǐng)問誰有閑置的LIDAR Lite V2激光測(cè)距模塊,可否原價(jià)或加價(jià)出售給我?多謝了我的電話***
2016-03-07 12:04:22
我這個(gè)產(chǎn)品是智能卡車掛鎖,帶GPS定位,當(dāng)車處于運(yùn)動(dòng)狀態(tài)時(shí),運(yùn)動(dòng)傳感器發(fā)一個(gè)信號(hào)給CPU啟動(dòng)GPS功能,就這個(gè)功能;我找的都是加速度傳感器,就是不知道加速度傳感器在車勻速狀態(tài)能不能檢測(cè)到,所以想找運(yùn)動(dòng)傳感器,只要鎖處于運(yùn)動(dòng)狀態(tài)就能檢測(cè)到。
2018-07-27 17:44:02
機(jī)械臂運(yùn)動(dòng)學(xué)模型的知識(shí)點(diǎn)匯總,絕對(duì)實(shí)用
2022-01-20 06:53:26
兩通道DPCA動(dòng)目標(biāo)檢測(cè)原理是什么?基于機(jī)載單通道SAR數(shù)據(jù)的地面運(yùn)動(dòng)目標(biāo)檢測(cè)算法
2021-06-03 06:04:06
求助基于LABVIEW機(jī)構(gòu)運(yùn)動(dòng)參數(shù)虛擬檢測(cè)平臺(tái)設(shè)計(jì)的程序
2015-04-13 16:55:59
這個(gè)是電機(jī)過流檢測(cè)電路,但是在過流是地,繼電器不的跳動(dòng),這是為什么?謝謝,
2013-05-13 09:24:21
各位大神,請(qǐng)教一個(gè)關(guān)于運(yùn)動(dòng)物體輪廓檢測(cè)系統(tǒng)的問題,望各位大神能夠給出一點(diǎn)指點(diǎn),非常感謝。該系統(tǒng)使用單列稀疏分布的傳感器組2014年安徽省大學(xué)生電子設(shè)計(jì)競(jìng)賽試題D題第 1 頁共 3 頁圖1TI杯
2014-09-03 09:17:49
請(qǐng)問LIDAR感知挑戰(zhàn)有哪些?
2021-06-17 11:49:08
攝像頭、雷達(dá)和LIDAR,自動(dòng)駕駛汽車選擇誰?
2020-11-23 12:32:36
運(yùn)動(dòng)檢測(cè)及測(cè)速GUIdemo詳解涉及內(nèi)容:1.GUI主--子界面設(shè)計(jì):(1)主界面GUI啟動(dòng)子界面GUI (2)更改程序圖標(biāo)icon2.GUI轉(zhuǎn)化為可執(zhí)行程度:(1)用matlab自帶編譯工具
2011-08-15 11:04:46
`10月12日下午,國(guó)內(nèi)激光雷達(dá)創(chuàng)業(yè)公司RoboSense(速騰聚創(chuàng))正式對(duì)外發(fā)布激光雷達(dá)的感知算法——RS-LiDAR-Algorithms感知算法1.0版本。此套件包括定位、路沿/可行駛區(qū)域檢測(cè)
2017-10-13 16:08:29
針對(duì)復(fù)雜環(huán)境下運(yùn)動(dòng)目標(biāo)檢測(cè)提出一種基于像素分類的運(yùn)動(dòng)目標(biāo)檢測(cè)算法。該算法通過亮度歸一化對(duì)圖像序列進(jìn)行預(yù)處理,用以降低光照變化造成的誤檢,根據(jù)場(chǎng)景中不同像素點(diǎn)的
2009-04-10 08:51:01 4
4 針對(duì)序列圖像中的運(yùn)動(dòng)目標(biāo)檢測(cè)問題,在獨(dú)立分量分析的基本理論和算法的基礎(chǔ)上,提出采用基于正交對(duì)稱矩陣的快速定點(diǎn)算法對(duì)實(shí)際視頻圖像中的運(yùn)動(dòng)目標(biāo)進(jìn)行運(yùn)動(dòng)檢測(cè)的方法。
2009-05-26 20:38:0643 針對(duì)室內(nèi)安全監(jiān)控的場(chǎng)景特點(diǎn),提出一種穩(wěn)健的運(yùn)動(dòng)目標(biāo)檢測(cè)方法,對(duì)每個(gè)背景像素使用多個(gè)矢量表示,利用當(dāng)前幀和背景幀像素的色度分量差分進(jìn)行運(yùn)動(dòng)檢測(cè),并選擇性地更新背景模
2009-06-20 10:08:0821 目前,運(yùn)動(dòng)目標(biāo)的檢測(cè)是計(jì)算機(jī)視覺領(lǐng)域中最活躍的研究主題之一。本文介紹了光流法、幀間差分等運(yùn)動(dòng)目標(biāo)的檢測(cè)方法,提出了一種基于熵的
2009-09-08 09:31:0317 紅外運(yùn)動(dòng)弱小目標(biāo)的動(dòng)態(tài)規(guī)劃檢測(cè):針對(duì)動(dòng)態(tài)規(guī)劃方法在對(duì)紅外序列圖像運(yùn)動(dòng)弱小目標(biāo)進(jìn)行檢測(cè)時(shí)的能量擴(kuò)散問題,提出了一種新的檢測(cè)方法。該方法以目標(biāo)的運(yùn)動(dòng)特性為基礎(chǔ),構(gòu)造
2009-10-21 08:04:3616 運(yùn)動(dòng)物體檢測(cè)是圖像處理和分析系統(tǒng)的關(guān)鍵技術(shù),為了能夠更準(zhǔn)確的檢測(cè)視頻流中的運(yùn)動(dòng)物體,本文提出了一種基于運(yùn)動(dòng)估計(jì)的運(yùn)動(dòng)物體檢測(cè)方法,該方法以運(yùn)動(dòng)估計(jì)過程中產(chǎn)生
2009-12-14 13:37:4816 本文對(duì)視頻序列中的運(yùn)動(dòng)目標(biāo)檢測(cè)方法進(jìn)行了研究,提出了一種基于背景差分的運(yùn)動(dòng)目標(biāo)檢測(cè)算法。首先通過建立混合高斯模型,獲取背景圖像,并對(duì)背景進(jìn)行實(shí)時(shí)更新。然后通
2010-01-15 11:42:2020 提出一種幀間雙差分法、自適應(yīng)光流、snake算法相結(jié)合的運(yùn)動(dòng)目標(biāo)檢測(cè)方法。通過幀間雙差分法提取運(yùn)動(dòng)區(qū)域,針對(duì)運(yùn)動(dòng)區(qū)域進(jìn)行光流計(jì)算,對(duì)光流計(jì)算結(jié)果進(jìn)行C-均值聚類,最后用聚類
2010-03-01 13:56:3422 視頻或圖像序列中的運(yùn)動(dòng)目標(biāo)檢測(cè)與跟蹤已成為計(jì)算機(jī)視覺領(lǐng)域研究的重要方向之一。本文實(shí)現(xiàn)了視頻序列中的運(yùn)動(dòng)目標(biāo)檢測(cè),使用了背景差法和幀間差分法檢測(cè)到運(yùn)動(dòng)目標(biāo)并進(jìn)
2010-10-09 16:01:2178 微波運(yùn)動(dòng)檢測(cè)器
這個(gè)
2009-09-26 16:01:553829 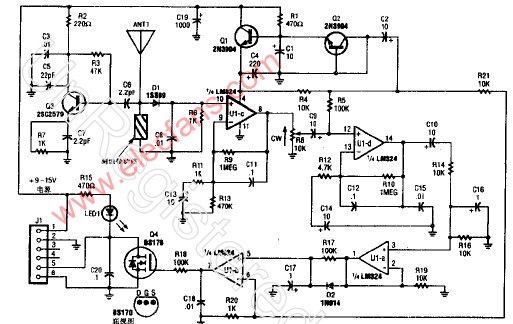
低信噪比運(yùn)動(dòng)紅外點(diǎn)目標(biāo)的檢測(cè)
為解決高空背景條件下紅外低信噪比運(yùn)動(dòng)點(diǎn)目標(biāo)的檢測(cè)問題,本文提出了一種基于膨脹累加的檢測(cè)方法.運(yùn)用形態(tài)膨
2009-10-21 18:38:47755 
本內(nèi)容提供了基于碼本模型的運(yùn)動(dòng)目標(biāo)檢測(cè)算法
2011-05-19 10:54:0132 研究了目前運(yùn)動(dòng)目標(biāo)檢測(cè)常用的兩種方法:三幀差分法及混合高斯模型背景差分法,并對(duì)兩種運(yùn)動(dòng)目標(biāo)檢測(cè)方法作了簡(jiǎn)述,且輔以典型的視頻運(yùn)動(dòng)目標(biāo)檢測(cè)實(shí)例,給出了兩種方法的實(shí)驗(yàn)結(jié)果
2011-12-23 14:31:4123 提出了一種基于Surendra改進(jìn)的運(yùn)動(dòng)目標(biāo)檢測(cè)算法,通過對(duì)背景更新系數(shù)的改進(jìn),獲取穩(wěn)定準(zhǔn)確的背景,再將背景幀與含運(yùn)動(dòng)區(qū)域的圖像幀用差分運(yùn)算獲得運(yùn)動(dòng)目標(biāo)圖像。實(shí)驗(yàn)結(jié)果表明,
2013-08-07 19:02:3531 基于改進(jìn)差分算法的運(yùn)動(dòng)目標(biāo)檢測(cè)與跟蹤_王鎮(zhèn)西
2016-01-05 17:03:360 物體運(yùn)動(dòng)檢測(cè)電路原理圖都是值得參考的設(shè)計(jì)。
2016-05-11 17:33:1924 視頻監(jiān)控中的運(yùn)動(dòng)目標(biāo)檢測(cè)
2016-12-17 17:07:301 基于置信傳播的視頻運(yùn)動(dòng)目標(biāo)檢測(cè)_郭春生
2017-01-07 16:00:430 改進(jìn)的ViBe運(yùn)動(dòng)目標(biāo)檢測(cè)算法_劉春
2017-03-19 11:41:390 本文檔內(nèi)容介紹了建立無線運(yùn)動(dòng)檢測(cè)系統(tǒng)的設(shè)計(jì)應(yīng)用,包括系統(tǒng)框架圖。
2017-09-18 10:45:086 基于DSP運(yùn)動(dòng)目標(biāo)檢測(cè)系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
2017-10-19 14:16:479 分析和理解視頻序列是當(dāng)前計(jì)算機(jī)視覺的重點(diǎn)研究鄰域。通常,運(yùn)動(dòng)目標(biāo)檢測(cè)在自動(dòng)視覺監(jiān)控系統(tǒng)中起著基石的作用,同時(shí)它也是運(yùn)動(dòng)捕獲、活動(dòng)分析等應(yīng)用的基礎(chǔ)。運(yùn)動(dòng)目標(biāo)檢測(cè)的基本操作就是將稱為前景的運(yùn)動(dòng)目標(biāo)與稱為
2017-10-30 16:42:392 對(duì)于運(yùn)動(dòng)中的攝像機(jī)所拍攝視頻的分析,會(huì)發(fā)現(xiàn)目標(biāo)和背景都在運(yùn)動(dòng)的現(xiàn)象,因此難以較好地對(duì)運(yùn)動(dòng)目標(biāo)進(jìn)行檢測(cè)。針對(duì)此問題提出了一種適應(yīng)該類對(duì)象的運(yùn)動(dòng)目標(biāo)檢測(cè)技術(shù),該方法采用徑向運(yùn)動(dòng)補(bǔ)償和像素值重分配來實(shí)現(xiàn)
2017-11-15 14:53:158 視頻序列中運(yùn)動(dòng)目標(biāo)的檢測(cè)是目標(biāo)識(shí)別、標(biāo)記和追蹤的重要組成部分,背景減除法是運(yùn)動(dòng)目標(biāo)檢測(cè)中廣泛應(yīng)用的算法。針對(duì)光線變化、噪聲和局部運(yùn)動(dòng)等影響運(yùn)動(dòng)目標(biāo)檢測(cè)效果的問題,提出一種基于背景減除法的視頻序列運(yùn)動(dòng)
2017-12-01 15:22:052 目前,直接切入全固態(tài)LiDAR或者正朝著全固態(tài)LiDAR轉(zhuǎn)型的國(guó)內(nèi)外企業(yè)數(shù)量已逐步超越機(jī)械式LiDAR和混合固態(tài)LiDAR領(lǐng)域。
2018-06-01 17:42:002703 絕大部分LiDAR系統(tǒng)將在未來十年逐步轉(zhuǎn)為固態(tài)方案,但是,仍將會(huì)有一些具有真正高性能和高價(jià)值的旋轉(zhuǎn)式機(jī)械LiDAR傳感器。
2018-05-16 11:25:036037 據(jù)報(bào)道,現(xiàn)有LiDAR(激光雷達(dá))系統(tǒng)已被用于從安全應(yīng)用到測(cè)繪,再到工業(yè)自動(dòng)化等各類創(chuàng)新應(yīng)用。其中,汽車市場(chǎng)對(duì)LiDAR系統(tǒng)的發(fā)展和應(yīng)用尤其關(guān)注。LiDAR掃描儀是自動(dòng)駕駛汽車原型系統(tǒng)的關(guān)鍵組件,也是當(dāng)前交通標(biāo)志識(shí)別、自適應(yīng)巡航控制(ACC)、盲點(diǎn)檢測(cè)、防撞系統(tǒng)和車道偏離警告等系統(tǒng)中的關(guān)鍵組件。
2018-08-13 10:03:002610 檢測(cè)頭是針形結(jié)構(gòu)。旋轉(zhuǎn)軸通過減速器控制檢測(cè)頭旋轉(zhuǎn)。二維十字平臺(tái)控制旋轉(zhuǎn)軸的平面運(yùn)動(dòng)。被檢測(cè)物體固定以后,運(yùn)動(dòng)控制器要根據(jù)其外形控制檢測(cè)頭沿物體表面運(yùn)動(dòng)。
2018-10-07 10:04:004474 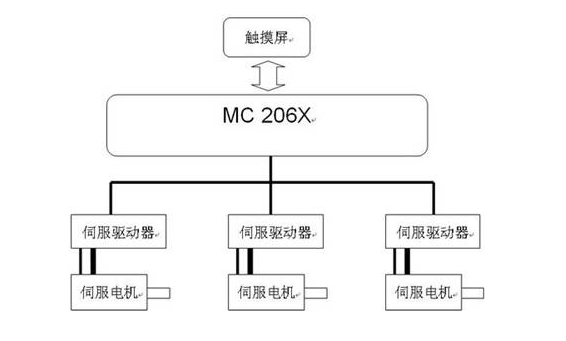
LIDAR (代表光檢測(cè)和測(cè)距)是一種測(cè)距技術(shù),它通過在目標(biāo)上發(fā)射光束來測(cè)量物體的距離,并使用反射光束的時(shí)間和波長(zhǎng)來估計(jì)距離,并且在某些應(yīng)用中(激光成像),創(chuàng)建對(duì)象的3D表示。
2019-12-05 17:29:5619188 除了攝像頭和雷達(dá),第三種傳感器——激光雷達(dá)( LiDAR )也愈發(fā)受歡迎。如同雷達(dá)技術(shù)一樣,LiDAR 利用激光來測(cè)定物體的距離,并且像攝像頭和雷達(dá)圖像一樣,它可以使用卷積神經(jīng)網(wǎng)絡(luò)( CNN )來檢測(cè)道路上的物體。
2020-09-03 09:44:512087 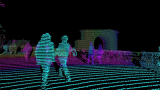
全球領(lǐng)先的工業(yè)傳感器和傳感器系統(tǒng)制造商倍加福(Pepperl+Fuchs)的 R2300 多層掃描儀,用于三維物體檢測(cè),具有極高的測(cè)量密度,讓人印象深刻:外殼緊湊且易于集成,并包含高精度 LiDAR
2020-10-30 04:49:42237 iPhone12Pro是蘋果公司的第一款智能手機(jī),背面配有光檢測(cè)和測(cè)距(LiDAR)掃描儀。但是LiDAR的作用是什么,Apple計(jì)劃將來使用它嗎?
2020-11-03 09:59:4213022 LiDAR 代表 Light Detection and Ranging,即通過光帶中的電磁輻射進(jìn)行(遠(yuǎn)程)檢測(cè)和測(cè)量。該設(shè)備應(yīng)用了雷達(dá)的經(jīng)典而簡(jiǎn)單的原理,但它確實(shí)使用了由激光脈沖制成的光束。
2021-06-26 16:04:012317 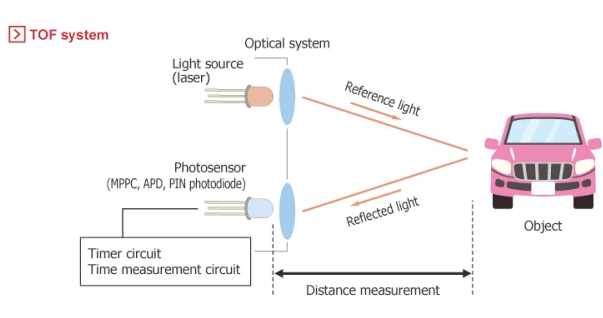
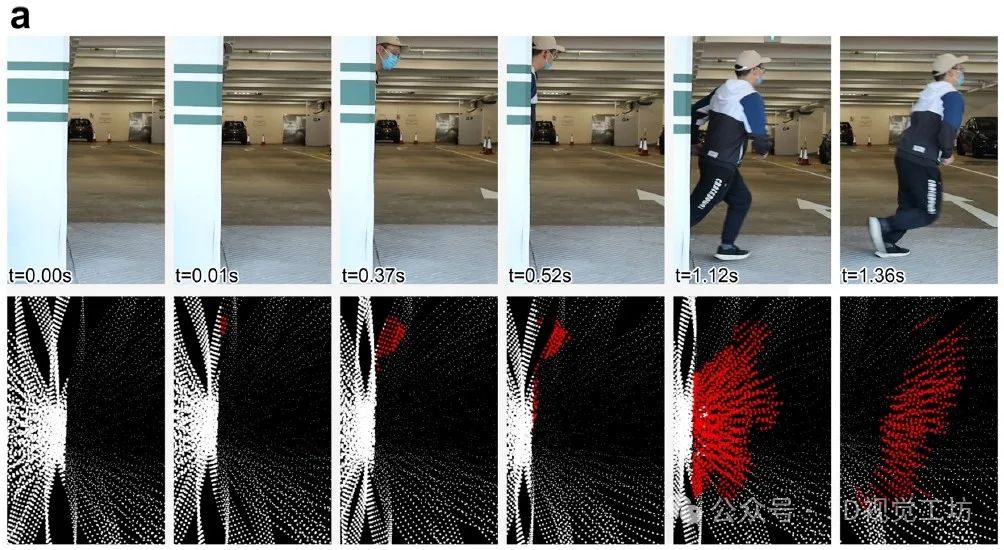
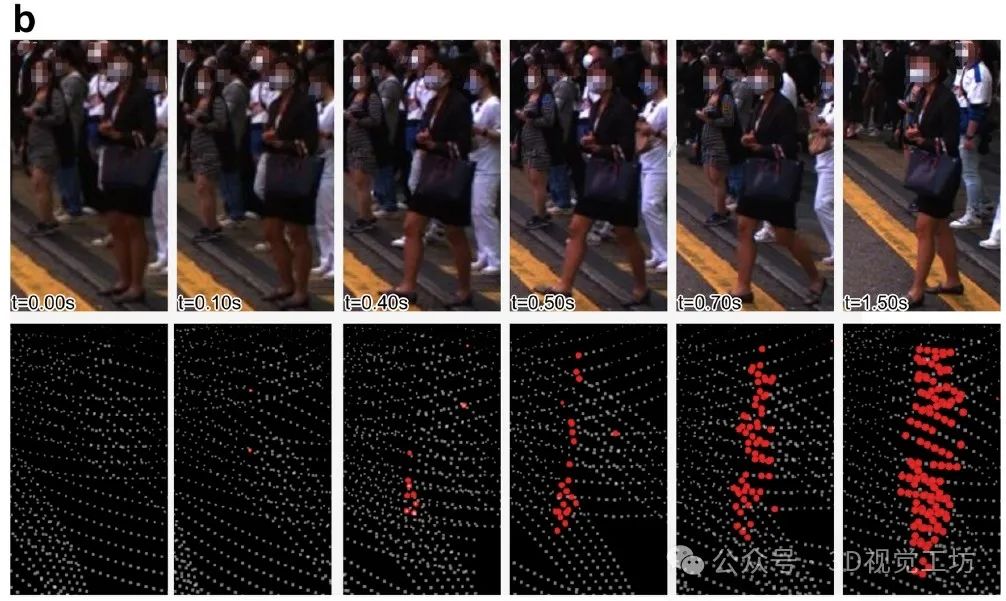
激光雷達(dá)生成高精度的點(diǎn)云,許多技術(shù)將其作為一個(gè)模塊來應(yīng)用。但處理和存儲(chǔ)產(chǎn)生大量數(shù)據(jù)一直是一個(gè)很大的挑戰(zhàn)。本文將通過背景減法揭示如何在設(shè)備端上進(jìn)行運(yùn)動(dòng)檢測(cè),減少傳輸?shù)目倲?shù)據(jù)。 LiDAR技術(shù)的發(fā)展已經(jīng)
2021-08-16 14:46:472354 總部位于慕尼黑的初創(chuàng)公司 Blickfeld 開發(fā)了突破性的高性能和可大規(guī)模生產(chǎn)的 LiDAR(光檢測(cè)和測(cè)距)傳感技術(shù),推出了其開創(chuàng)性的感知軟件 Percept。Percept 專為
2022-03-16 09:49:361371 該項(xiàng)目將借助KV260上的PYNQ-DPU覆蓋,從而能夠使我們?cè)?b class="flag-6" style="color: red">LiDAR點(diǎn)云上進(jìn)行3D對(duì)象檢測(cè)比以往任何時(shí)候都更加高效!
2022-04-26 17:41:331775 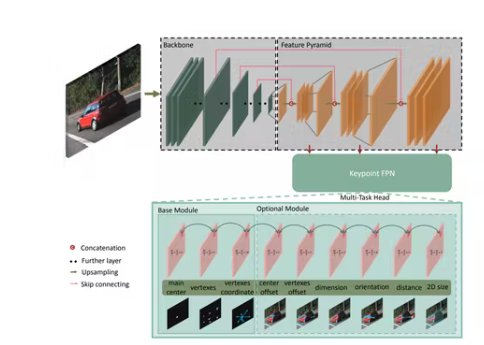
在汽車LiDAR發(fā)展的早期,市場(chǎng)是由AV市場(chǎng)驅(qū)動(dòng)的。近年來,LiDAR的應(yīng)用、市場(chǎng)細(xì)分和全球汽車行業(yè)的政治都發(fā)生了巨大變化。 造成這一劇變的最大因素是,AV并沒有批量出現(xiàn)。AV的市場(chǎng)前景仍然渺茫,距離大規(guī)模起飛還差得很遠(yuǎn)。
2022-11-22 15:39:311295 電子發(fā)燒友網(wǎng)站提供《運(yùn)動(dòng)方向檢測(cè)器.zip》資料免費(fèi)下載
2022-11-23 11:26:300 故FMWC LiDAR的距離分辨率取決于發(fā)射信號(hào)的帶寬,帶寬越大,距離分辨率也越大。而當(dāng)帶寬一樣時(shí),無論信號(hào)持續(xù)的時(shí)間如何變化都不會(huì)影響LiDAR的距離分辨率。
2022-11-23 11:27:301477 電子發(fā)燒友網(wǎng)站提供《基于PIR的運(yùn)動(dòng)檢測(cè)器.zip》資料免費(fèi)下載
2022-12-07 15:28:211 電子發(fā)燒友網(wǎng)站提供《運(yùn)動(dòng)檢測(cè)物聯(lián)網(wǎng)設(shè)備開源分享.zip》資料免費(fèi)下載
2022-12-13 14:16:470 電子發(fā)燒友網(wǎng)站提供《使用PIR運(yùn)動(dòng)傳感器和Surilli GSM檢測(cè)運(yùn)動(dòng).zip》資料免費(fèi)下載
2022-12-28 09:38:570 電子發(fā)燒友網(wǎng)站提供《簡(jiǎn)單的運(yùn)動(dòng)檢測(cè)器.zip》資料免費(fèi)下載
2022-12-30 09:39:451 該超聲波運(yùn)動(dòng)檢測(cè)器電路項(xiàng)目從4至7米的距離拾取包括人在內(nèi)的任何物體的運(yùn)動(dòng)。一旦檢測(cè)到運(yùn)動(dòng),電路的輸出就會(huì)亮起一個(gè)紅色LED,指示存在障礙物或入侵者。
2023-03-19 14:10:112158 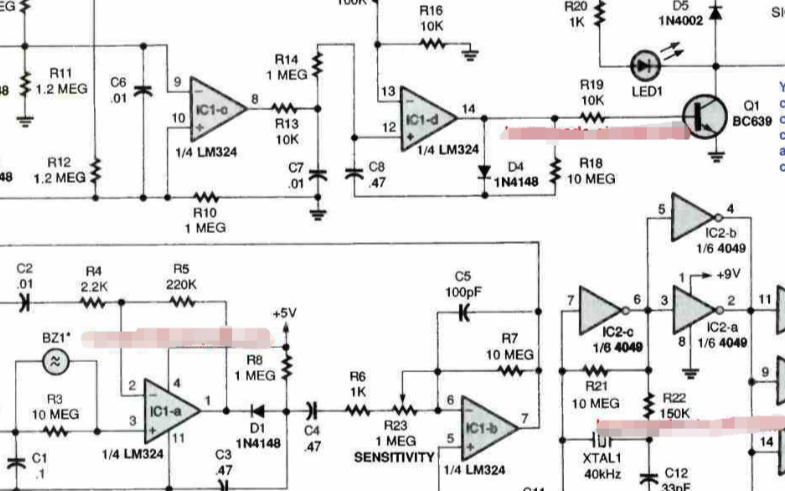
運(yùn)動(dòng)目標(biāo)檢測(cè)的主要目的是從圖片序列中將變化區(qū)域或者運(yùn)動(dòng)物體從背景圖像中分離出來,常用于視頻監(jiān)控、異常檢測(cè)、三維重建、實(shí)時(shí)定位與建圖等領(lǐng)域。
2023-03-29 09:29:50476 運(yùn)動(dòng)目標(biāo)檢測(cè)的主要目的是從圖片序列中將變化區(qū)域或者運(yùn)動(dòng)物體從背景圖像中分離出來,常用于視頻監(jiān)控、異常檢測(cè)、三維重建、實(shí)時(shí)定位與建圖等領(lǐng)域。運(yùn)動(dòng)目標(biāo)檢測(cè)是許多領(lǐng)域應(yīng)用落地的基礎(chǔ),近年來被廣泛地關(guān)注和研究,對(duì)運(yùn)動(dòng)無人機(jī)檢測(cè)亦是如此。目前,運(yùn)動(dòng)目標(biāo)檢測(cè)的基本方法主要包括背景消減法、幀間差分法和光流法。
2023-04-10 16:42:30486 對(duì)象物并反射回來的時(shí)間差。 【LiDAR示意圖】 LiDAR的特點(diǎn)在于它不僅可以準(zhǔn)確地檢測(cè)到達(dá)對(duì)象物的距離,還可以準(zhǔn)確地
2023-04-30 14:41:002324 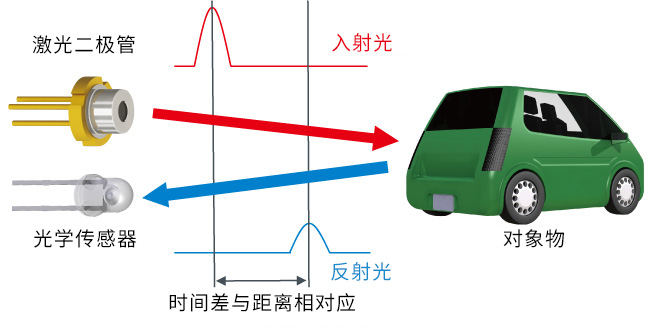
如何利用LiDAR實(shí)現(xiàn)深度感測(cè)
2023-12-06 16:19:57263 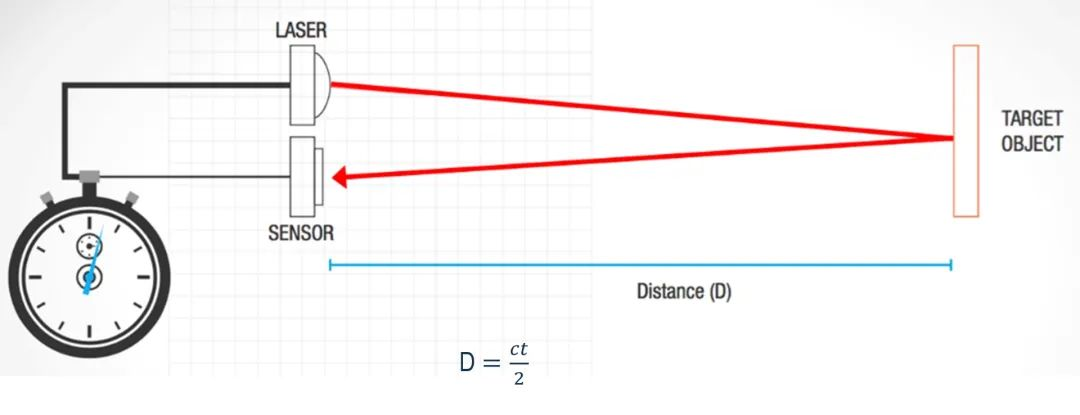
基于激光雷達(dá)(LiDAR)的行人重識(shí)別。我們利用低成本的LiDAR設(shè)備解決了人員再識(shí)別中的挑戰(zhàn),構(gòu)建了名為L(zhǎng)ReID的LiDAR數(shù)據(jù)集,并提出了一種名為ReID3D的LiDAR-based ReID框架。
2023-12-11 10:41:53168 
在車輛的所有傳感器中,LiDAR經(jīng)歷的動(dòng)蕩最大,甚至連領(lǐng)先的LiDAR公司都始料未及。即使是像Valeo這樣的LiDAR先驅(qū),也無法保證能跟上瞬息萬變的市場(chǎng)格局。
2024-02-21 09:11:33315 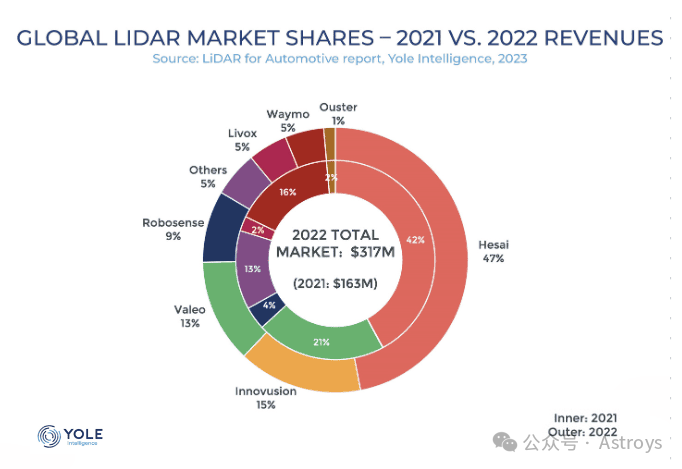
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論