提高效率。增強(qiáng)現(xiàn)實(shí)(AR)和虛擬現(xiàn)實(shí)(VR)頭戴式顯示器在工廠的運(yùn)行和設(shè)計(jì)方面,以及在時(shí)間和成本的節(jié)約方面起著越來(lái)越重要的作用。超過(guò)三分之一的制造商已采用或計(jì)劃在未來(lái)三年中采用這兩種技術(shù)。[1] 了解我們
2019-08-19 04:45:11
AR/VR增強(qiáng)現(xiàn)實(shí) 虛擬現(xiàn)實(shí),嵌入式解決方案探討北京太速科技有限公司視頻增強(qiáng)現(xiàn)實(shí)產(chǎn)品與視頻矩陣拼接等產(chǎn)品開(kāi)發(fā),增強(qiáng)現(xiàn)實(shí)技術(shù)包含了多媒體、三維建模、實(shí)時(shí)視頻顯示及控制、多傳感器融合、實(shí)時(shí)跟蹤及注冊(cè)
2016-03-14 17:09:25
AR增強(qiáng)現(xiàn)實(shí)技術(shù)解讀
2021-01-26 06:29:13
Ingress是谷歌于2012年11月16日發(fā)布的增強(qiáng)現(xiàn)實(shí)(Augmented Reality)大型多人在線游戲(MMOG)。
2019-08-08 07:16:49
生命小游戲,又叫元胞自動(dòng)機(jī),一個(gè)令人著迷的圖靈完備系統(tǒng)參考資料:https://zhuanlan.zhihu.com/p/347305597https://www.zhihu.com
2022-02-12 18:33:02
執(zhí)行命令:$ python text.py 即可運(yùn)行程序,運(yùn)行效果如下圖所示: 第二部分來(lái)介紹一下增強(qiáng)現(xiàn)實(shí),先在前邊人臉識(shí)別的基礎(chǔ)上來(lái)做,這次我們是判斷眼睛的位置,然后在眼睛的附近疊加一個(gè)類(lèi)似眼睛形狀
2017-05-25 22:11:56
基于增強(qiáng)現(xiàn)實(shí)的作品,這次看到香蕉派這塊板子,一下想到剛好可以用來(lái)做這方面的開(kāi)發(fā)。 當(dāng)前隨著微處理器的運(yùn)行速度越來(lái)越快,處理性能越來(lái)越好,以及圖像處理特別是人臉識(shí)別和增強(qiáng)現(xiàn)實(shí)技術(shù)的發(fā)展,使得原來(lái)依靠
2017-04-24 16:57:06
請(qǐng)問(wèn)一下,光電傳感器在輕工自動(dòng)機(jī)上有哪些應(yīng)用?
2021-05-08 08:58:49
單片機(jī)有沒(méi)有串口波特率自動(dòng)識(shí)別算法
2023-09-21 07:09:59
在matlab元胞數(shù)組求差過(guò)程中,出現(xiàn)了??? Error using ==> cell.setdiff at 28Input must be cell arrays of strings
2014-10-14 19:45:57
(35講)垃圾回收算法——標(biāo)記清除算法
2020-04-29 15:12:25
基于GFO算子(廣義模糊算子)的圖像增強(qiáng)算法如何去實(shí)現(xiàn)?怎樣對(duì)圖像增強(qiáng)算法進(jìn)行分析?
2021-06-04 06:24:35
射頻識(shí)別(RFID)技術(shù)是一種無(wú)接觸自動(dòng)識(shí)別技術(shù),其基本原理是利用射頻信號(hào)及其空間耦合、傳輸特性,實(shí)現(xiàn)對(duì)靜止的或移動(dòng)中的待識(shí)別物品的自動(dòng)機(jī)器識(shí)別。
2019-09-17 08:20:24
全自動(dòng)機(jī)械手上下料ST共用測(cè)試機(jī)系統(tǒng)有什么特點(diǎn)?相信不少人是有疑問(wèn)的,今天深圳四元數(shù)就跟大家解答一下!四元數(shù)全自動(dòng)機(jī)械手上下料ST共用測(cè)試機(jī)系統(tǒng)特點(diǎn):1、高精度、高效率、高穩(wěn)定性的視覺(jué)對(duì)位算法;2、使用網(wǎng)
2021-10-19 15:41:19
安卓車(chē)牌識(shí)別 ios車(chē)牌識(shí)別 移動(dòng)端車(chē)牌識(shí)別 手機(jī)端車(chē)牌識(shí)別 車(chē)牌識(shí)別sdk 前端車(chē)牌識(shí)別SDK算法同行業(yè)中,別人標(biāo)配有的產(chǎn)品我有,別人沒(méi)有的產(chǎn)品我們也有,如此才能增強(qiáng)競(jìng)爭(zhēng)力。車(chē)牌識(shí)別sdk這個(gè)用于
2018-05-17 22:55:40
視頻增強(qiáng)算法的基本原理是什么?單尺度算法的原理是什么?視頻增強(qiáng)能解決的實(shí)際問(wèn)題及應(yīng)用領(lǐng)域
2021-06-03 07:14:00
請(qǐng)問(wèn)一下除了Pokémon Go之外增強(qiáng)現(xiàn)實(shí)還能給我們帶來(lái)什么?
2021-06-02 06:30:05
通過(guò)將關(guān)鍵駕駛信息疊加到真實(shí)世界中,增強(qiáng)現(xiàn)實(shí)(AR)抬頭顯示(HUD)將徹底改變駕駛體驗(yàn)。如今,AR顯示的最佳示例是用于戰(zhàn)斗機(jī),可在飛行員的直接視線中置放大量關(guān)鍵信息。
2019-07-31 07:52:07
研究了不確定有窮自動(dòng)機(jī)NFA、確定有窮自動(dòng)機(jī)FA、規(guī)范有窮自動(dòng)機(jī)GFA的基本關(guān)系與等價(jià)轉(zhuǎn)換;給出了“NFA→FA”等價(jià)轉(zhuǎn)換算法與“FA→GFA”等價(jià)轉(zhuǎn)換算法,構(gòu)造性證明了從FA到GFA的存
2008-12-10 17:25:51 14
14 城市發(fā)展預(yù)測(cè)細(xì)胞自動(dòng)機(jī)模型及轉(zhuǎn)換規(guī)則
2009-01-09 22:22:1514 根據(jù)矩陣方程理論和細(xì)胞自動(dòng)機(jī)原理,提出了加性細(xì)胞自動(dòng)機(jī)狀態(tài)轉(zhuǎn)移結(jié)構(gòu)的同構(gòu)性方法,該方法利用狀態(tài)轉(zhuǎn)移矩陣方程及其特征多項(xiàng)式分析規(guī)則90和150加性細(xì)胞自動(dòng)機(jī),證明了特
2009-02-28 17:03:3935 【摘要】介紹了提供高可用性的雙機(jī)系統(tǒng)的原理、部署和體系結(jié)構(gòu);定義了雙機(jī)系統(tǒng)各部件功能,描述了子系統(tǒng)間的接口,給出了該雙機(jī)系統(tǒng)的有限自動(dòng)機(jī)。該自動(dòng)機(jī)具有有限數(shù)
2009-03-15 13:56:4610 針對(duì)病毒在復(fù)雜網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)中傳播行為的多樣性特點(diǎn),運(yùn)用元胞自動(dòng)機(jī)模擬病毒傳播過(guò)程,并采用“易染-感染-免疫”模型和“易染-感染-易染”模型構(gòu)造元胞自動(dòng)機(jī)模擬方法。實(shí)
2009-04-10 09:02:3733 “數(shù)字油田”要設(shè)計(jì)一個(gè)涵蓋油田全部業(yè)務(wù)活動(dòng)的綜合信息系統(tǒng)指導(dǎo)性框架,當(dāng)作今后油田信息化建設(shè)的指南。它作為一個(gè)復(fù)雜的開(kāi)放系統(tǒng),適于使用元胞自動(dòng)機(jī)模型來(lái)進(jìn)行研究
2009-05-30 13:29:0016 用多個(gè)時(shí)間自動(dòng)機(jī)來(lái)規(guī)范模擬風(fēng)洞試驗(yàn)自動(dòng)控制系統(tǒng),給出了一種自動(dòng)化的風(fēng)洞試驗(yàn)控制模型(CRW),并采用實(shí)時(shí)系統(tǒng)驗(yàn)證工具Uppaal 對(duì)CRW 進(jìn)行了驗(yàn)證,證明了該模型具有安全性
2009-07-07 13:30:5924 利用 DNA 計(jì)算的方法構(gòu)造的分子自動(dòng)機(jī)是一種納米尺度的計(jì)算機(jī)構(gòu),它能在納米尺度進(jìn)行高度并行的邏輯、推理等運(yùn)算,從而實(shí)現(xiàn)自動(dòng)機(jī)的功
2009-09-08 08:12:189 利用有限自動(dòng)機(jī)和拓?fù)渑判蚶碚摼帉?xiě)的一個(gè)工具軟件,能直接處理數(shù)據(jù)庫(kù)分析人員利用CASE工具產(chǎn)生的帶中文注釋的表定義DDL 腳本文件,并可按
2009-09-08 09:37:2325 模塊化的狀態(tài)自動(dòng)機(jī)實(shí)現(xiàn)了作業(yè)的執(zhí)行。以數(shù)據(jù)庫(kù)為中心的配置信息存儲(chǔ)與模塊間參數(shù)傳遞,構(gòu)建了整個(gè)系統(tǒng)的接口與框架。基于臨界區(qū)的代理事件處理模型實(shí)現(xiàn)了數(shù)據(jù)流驅(qū)動(dòng)。
2009-09-23 10:25:1315 該文提出一種基于時(shí)間自動(dòng)機(jī)分布式合作的入侵檢測(cè)算法。首先,將整個(gè)網(wǎng)絡(luò)分為子區(qū)域,每一區(qū)域隨機(jī)選出簇頭擔(dān)任監(jiān)視節(jié)點(diǎn),負(fù)責(zé)本區(qū)域的入侵檢測(cè)。其次,按照路由協(xié)議構(gòu)筑
2009-10-29 12:45:2218 首先利用直方圖調(diào)整技術(shù)對(duì)原始圖像進(jìn)行灰度值調(diào)整,然后通過(guò)整數(shù)小波變換獲得原始圖像的高頻子帶,并基于JND模型計(jì)算小波系數(shù)的恰可失真門(mén)限,最后利用擴(kuò)頻水印技術(shù)將由元胞自動(dòng)機(jī)
2012-03-22 17:28:5538 文中在NaSch模型的基礎(chǔ)上提出一個(gè)改進(jìn)的元胞自動(dòng)機(jī)模型來(lái)模擬周期性邊界條件下高速公路上車(chē)流運(yùn)動(dòng)。考慮到不同速度應(yīng)有不同的安全車(chē)間距、反應(yīng)時(shí)間和減速距離,根據(jù)車(chē)輛與前方
2012-05-07 10:09:0023 本書(shū)結(jié)合目前國(guó)內(nèi)自動(dòng)機(jī)械行業(yè)的現(xiàn)狀,從應(yīng)用的角度系統(tǒng)介紹了自動(dòng)機(jī)械的模塊化結(jié)構(gòu)及工作原理、設(shè)計(jì)選型方法、裝配調(diào)試及維護(hù)要領(lǐng)等。主要內(nèi)容包括:自動(dòng)機(jī)械的結(jié)構(gòu)組成、輸
2013-09-17 16:02:400 文章介紹了元胞自動(dòng)機(jī)在交通流模型中的應(yīng)用,具有較好的參考價(jià)值
2016-06-17 16:00:440 元胞自動(dòng)機(jī)的介紹資料,僅供參考和學(xué)習(xí),不得用作商業(yè)用途。
2016-06-24 17:01:543 基于決策論元胞自動(dòng)機(jī)的網(wǎng)絡(luò)輿情傳播研究_黎永壹
2017-01-07 19:00:390 多尺度Retinex算法在自動(dòng)目標(biāo)識(shí)別中的應(yīng)用_周澤華
2017-03-19 11:29:000 一種實(shí)用的自動(dòng)指紋識(shí)別完整算法_趙磊
2017-03-19 11:45:571 《自動(dòng)機(jī)械設(shè)計(jì)》以自動(dòng)機(jī)械的四大結(jié)構(gòu)組成部分為主要內(nèi)容展開(kāi),深入闡述了自動(dòng)機(jī)械設(shè)計(jì)中普遍性的理論問(wèn)題。在例舉實(shí)例中側(cè)重現(xiàn)代農(nóng)業(yè)自動(dòng)機(jī)械,力求做到理論聯(lián)系實(shí)際,突出專(zhuān)業(yè)特色和現(xiàn)代科學(xué)技術(shù)
2017-08-02 08:54:590 據(jù)麥姆斯咨詢(xún)報(bào)道,松下開(kāi)發(fā)出了一款3D LiDAR距離傳感器,它能夠廣視角精確測(cè)量周?chē)矬w的距離和方向,是自動(dòng)機(jī)器人運(yùn)行的關(guān)鍵組件。
2017-09-26 15:19:25 9999
9999 Alfred H. Schütte GmbH & Co. KG 公司推出了 CNC 控制的多軸自動(dòng)機(jī)床 A 36 PC ,進(jìn)一步擴(kuò)充了他們的 PC 產(chǎn)品線。A 36 PC 是一款 8 軸自動(dòng)機(jī)
2017-10-17 15:30:3510 有限自動(dòng)機(jī)是計(jì)算機(jī)科學(xué)的重要基石,它是研究離散數(shù)字動(dòng)態(tài)系統(tǒng)的一種數(shù)學(xué)模型,可以用來(lái)研究計(jì)算機(jī)的體系結(jié)構(gòu)、程序設(shè)計(jì)、計(jì)算復(fù)雜性的理論。而在經(jīng)典計(jì)算理論中,有限自動(dòng)機(jī)對(duì)應(yīng)的數(shù)學(xué)模型是理想的、定性的,往往
2017-11-23 10:58:210 進(jìn)行圖像處理,提取相關(guān)數(shù)據(jù)后分析了無(wú)突發(fā)事件時(shí)行人一般行走特性。針對(duì)突發(fā)事件下的行人流,利用K一鄰近算法和合力的思想描述了突發(fā)事件的影響傳播和突發(fā)事件下行人流的自組織現(xiàn)象,并由此提出一種新的元胞自動(dòng)機(jī)模型,該
2017-12-03 10:39:444 構(gòu)建組合服務(wù)的形式化模型是對(duì)其進(jìn)行驗(yàn)證的前提與基礎(chǔ),然而缺乏統(tǒng)一的構(gòu)建框架使得建模過(guò)程變得難以把握且無(wú)法實(shí)現(xiàn)自動(dòng)化。通過(guò)對(duì)確定型有限自動(dòng)機(jī)的擴(kuò)展,建立了用于描述OWL-S過(guò)程模型的有限遷移系統(tǒng)服務(wù)
2017-12-04 15:54:320 針對(duì)基于隨機(jī)上下文無(wú)關(guān)文法( SCFG)建模的多功能雷達(dá)(MFR)輻射源識(shí)別問(wèn)題,提出了一種基于隨機(jī)無(wú)窮自動(dòng)機(jī)( SISA)的MFR輻射源識(shí)別方法。在文法建模的基礎(chǔ)上,對(duì)水星MFR控制模塊文法產(chǎn)生
2017-12-06 10:47:061 針對(duì)目前硬件正則表達(dá)式匹配算法在存儲(chǔ)空間以及吞吐量等方面面臨的挑戰(zhàn),結(jié)合擴(kuò)展有限自動(dòng)機(jī)(XFA)正則表達(dá)式匹配算法,提出了一種預(yù)定義類(lèi)的壓縮自動(dòng)機(jī)匹配算法(Pre-Class CFA)。通過(guò)預(yù)定
2017-12-06 14:55:500 針對(duì)構(gòu)件式系統(tǒng)中任一構(gòu)件的非良構(gòu)性會(huì)導(dǎo)致系統(tǒng)不能正常運(yùn)行的問(wèn)題,提出一種基于接口自動(dòng)機(jī)(IA)來(lái)分析和檢測(cè)構(gòu)件良構(gòu)性(well-formedness)的算法,并據(jù)此實(shí)現(xiàn)了一個(gè)構(gòu)件良構(gòu)性檢測(cè)原型系統(tǒng)
2017-12-06 15:46:180 針對(duì)復(fù)雜的導(dǎo)流島沖突區(qū)機(jī)非沖突行為,應(yīng)用傳統(tǒng)解析法得到的右轉(zhuǎn)車(chē)道通行能力往往與實(shí)際運(yùn)行狀況偏差較大。為此,提出了基于VISSIM微觀交通仿真軟件的導(dǎo)流島機(jī)非沖突元胞自動(dòng)機(jī)模型。該模型利用VISSIM
2017-12-18 10:30:102 多標(biāo)記學(xué)習(xí)廣泛存在于現(xiàn)實(shí)生活中,是當(dāng)今機(jī)器學(xué)習(xí)領(lǐng)域的研究熱點(diǎn),在多標(biāo)記學(xué)習(xí)框架中,每個(gè)對(duì)象由一個(gè)示例構(gòu)成。但可能同時(shí)屬于多個(gè)類(lèi)別標(biāo)記,并且各個(gè)標(biāo)記之間相互關(guān)聯(lián),所以挖掘多標(biāo)記之間的關(guān)聯(lián)性對(duì)于多標(biāo)記
2017-12-25 15:53:141 已有的實(shí)時(shí)系統(tǒng)模型無(wú)法動(dòng)態(tài)創(chuàng)建新進(jìn)程.為此,基于時(shí)間自動(dòng)機(jī)模型,提出了異步多進(jìn)程時(shí)間自動(dòng)機(jī)模型,將每個(gè)進(jìn)程抽象為進(jìn)程時(shí)間自動(dòng)機(jī),其部分狀態(tài)能夠觸發(fā)新進(jìn)程,考慮到隊(duì)列會(huì)導(dǎo)致模型圖靈完備,進(jìn)程都被緩存
2017-12-29 14:10:100 在多標(biāo)記學(xué)習(xí)中,由于不同的標(biāo)記可能會(huì)帶有自身的一些特性,所以目前已經(jīng)出現(xiàn)了基于標(biāo)記類(lèi)屬屬性的多標(biāo)記學(xué)習(xí)算法LIFT。然而,類(lèi)屬屬性的構(gòu)建可能會(huì)增加屬性向量的維度,致使屬性空間存在冗余信息。為此,借助
2017-12-29 14:46:150 在分析、比較現(xiàn)有疏散仿真模型的基礎(chǔ)上,提出一種基于正六邊形元胞自動(dòng)機(jī)的行人疏散模型。該模型中疏散空間被分成相等的正六邊形,每個(gè)行人有包括靜止在內(nèi)的7個(gè)運(yùn)動(dòng)方向。給出速度等級(jí)的概念用來(lái)描述行人的疏散
2018-01-31 16:02:350 針對(duì)全自動(dòng)膠囊生產(chǎn)線自動(dòng)機(jī)工藝動(dòng)作過(guò)程復(fù)雜、協(xié)調(diào)性設(shè)計(jì)困難的問(wèn)題,從該自動(dòng)機(jī)的工作原理出發(fā),通過(guò)對(duì)其結(jié)構(gòu)和運(yùn)動(dòng)特性的分析,根據(jù)自動(dòng)機(jī)夾囊、頂囊機(jī)構(gòu)運(yùn)動(dòng)的協(xié)調(diào)性原則,提出了用統(tǒng)籌法的搭接網(wǎng)絡(luò)技術(shù)輔助
2018-03-08 11:43:050 針對(duì)高級(jí)Aho-Corasick (AC)自動(dòng)機(jī)為提高串匹配速度而造成的空間浪費(fèi)問(wèn)題,研究發(fā)現(xiàn)數(shù)據(jù)流對(duì)自動(dòng)機(jī)節(jié)點(diǎn)的訪問(wèn)規(guī)律,據(jù)此提出基于數(shù)據(jù)訪問(wèn)特征的混合自動(dòng)機(jī)構(gòu)建算法HybridFA。分別研究
2018-03-13 16:47:330 出多維數(shù)學(xué)模型,將冗余狀態(tài)分為0維狀態(tài)和維狀態(tài),通過(guò)前者按照維度壓縮,后者動(dòng)態(tài)構(gòu)建的方法將空問(wèn)復(fù)雜度降到理論下界,并在此基礎(chǔ)上提出多維有限自動(dòng)機(jī)(MFA, multi-dimensional finite
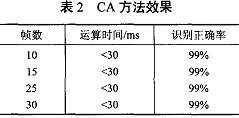
2018-03-14 14:33:140 元胞自動(dòng)機(jī)(cellular automata,CA) 是一種時(shí)間、空間、狀態(tài)都離散,空間相互作用和時(shí)間因果關(guān)系為局部的網(wǎng)格動(dòng)力學(xué)模型,具有模擬復(fù)雜系統(tǒng)時(shí)空演化過(guò)程的能力。最早由馮諾依曼提出。
2018-08-31 08:46:3214807 工作時(shí)鐘下,處理384×288像素的紅外圖像能夠達(dá)到400幀/秒以上的標(biāo)記速度,足夠滿(mǎn)足實(shí)時(shí)目標(biāo)識(shí)別系統(tǒng)的要求。處理速度可以滿(mǎn)足大部分實(shí)時(shí)目標(biāo)識(shí)別系統(tǒng)的要求。該算法同樣可以軟件編程方式應(yīng)用于嵌入式DSP系統(tǒng)中。
2018-11-14 10:07:006259 
事實(shí)上,自2016年起,國(guó)內(nèi)外已經(jīng)有好幾家企業(yè)開(kāi)始研發(fā)自動(dòng)機(jī)場(chǎng)。國(guó)外的有以色列的Aironotics、新加坡的Dronebox、加拿大的Sky X,國(guó)內(nèi)的有上海復(fù)亞智能、西安的因諾科技等企業(yè)。但目前
2018-11-29 17:47:466979 為了在多版本程序驗(yàn)證中利用鄰近版本之間的共享信息,提取并重用之前版本證據(jù)自動(dòng)機(jī)中的循環(huán)不變式,提出基于證據(jù)自動(dòng)機(jī)的軟件回歸驗(yàn)證。首先通過(guò)證據(jù)預(yù)處理生成適用于新版程序的證據(jù)文件,然后在輔助不變式增強(qiáng)
2018-12-07 10:17:023 射頻識(shí)別(RFID)技術(shù)是一種無(wú)接觸自動(dòng)識(shí)別技術(shù),其基本原理是利用射頻信號(hào)及其空間耦合、傳輸特性,實(shí)現(xiàn)對(duì)靜止的或移動(dòng)中的待識(shí)別物品的自動(dòng)機(jī)器識(shí)別。
2019-11-19 10:21:081222 生活在美國(guó)加州的居民即將迎來(lái)一項(xiàng)新福利:自動(dòng)機(jī)器人將會(huì)把外賣(mài)送到門(mén)口。根據(jù)美國(guó)加州車(chē)管所的最新公示,自2020年1月17日開(kāi)始有需求的公司可以申請(qǐng)獲得自動(dòng)駕駛送貨車(chē)的上路許可證。據(jù)悉該許可證分為測(cè)試和商用兩種,并會(huì)根據(jù)是否具備駕駛員進(jìn)行細(xì)分。
2019-12-23 09:49:27485 匿名相機(jī)使用機(jī)器學(xué)習(xí)來(lái)識(shí)別圖像和視頻中的人物,然后對(duì)整個(gè)面部或整個(gè)身體進(jìn)行模糊處理,像素化或遮擋。能夠完全遮擋特征非常重要,因?yàn)槟承┠:拖袼鼗椒梢阅孓D(zhuǎn),并且不僅可以通過(guò)臉部識(shí)別個(gè)人,還可以通過(guò)衣服,紋身和其他識(shí)別標(biāo)記識(shí)別個(gè)人。
2020-07-03 10:51:111494 解決了存儲(chǔ)功能,還需要解決無(wú)人機(jī)的充能問(wèn)題,目前無(wú)人機(jī)自動(dòng)機(jī)場(chǎng)有充電機(jī)場(chǎng)和換電機(jī)場(chǎng)兩種產(chǎn)品形式來(lái)解決無(wú)人機(jī)的充能問(wèn)題。簡(jiǎn)單講,換電自動(dòng)機(jī)場(chǎng)是通過(guò)機(jī)械臂把電池取下后,插入電池倉(cāng)進(jìn)行充電,然后將滿(mǎn)電電池
2020-09-16 11:09:052474 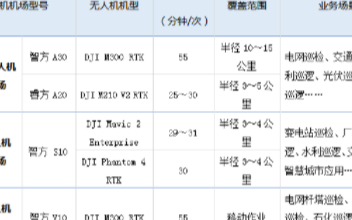
自動(dòng)機(jī)器學(xué)習(xí)(AutoML)的目標(biāo)就是使用自動(dòng)化的數(shù)據(jù)驅(qū)動(dòng)方式來(lái)做出上述的決策。用戶(hù)只要提供數(shù)據(jù),自動(dòng)機(jī)器學(xué)習(xí)系統(tǒng)自動(dòng)的決定最佳的方案。領(lǐng)域?qū)<也辉傩枰鄲烙趯W(xué)習(xí)各種機(jī)器學(xué)習(xí)的算法。
2020-12-26 10:56:22663 數(shù)字HB時(shí)代,高額的利益流動(dòng)吸引了不少人來(lái)加入這場(chǎng)逐鹿之戰(zhàn)。但是面對(duì)復(fù)雜的規(guī)則,許多幣圈新手紛紛下馬。于是我們團(tuán)隊(duì)歷盡多年研發(fā)出“量化自動(dòng)機(jī)器人”,自動(dòng)追蹤牛市、分析幣種、通過(guò)完備的計(jì)算系統(tǒng)幫我們盈利,那么下面我將為大家介紹什么是量化自動(dòng)機(jī)器人
2021-03-17 10:47:226830 針對(duì)多標(biāo)記學(xué)習(xí)分類(lèi)問(wèn)題,算法適應(yīng)方法將其轉(zhuǎn)化為排序問(wèn)題,并將輸出標(biāo)記按照其與示例的相關(guān)性進(jìn)行排序,該類(lèi)方法取得了較好的分類(lèi)效果。基于間隔準(zhǔn)則提出一種多標(biāo)記學(xué)習(xí)算法,通過(guò)優(yōu)化模型在示例的相關(guān)標(biāo)記集合
2021-03-26 11:33:129 為O(A|4)的自動(dòng)機(jī)終結(jié)字查找算法,該算法是至今僅有的專(zhuān)門(mén)用于計(jì)算自動(dòng)機(jī)的終結(jié)字的算法。以現(xiàn)有同步自動(dòng)機(jī)的同步字查找算法為藍(lán)本可以設(shè)計(jì)幾種自動(dòng)機(jī)終結(jié)字查找的新算法。理論分析和實(shí)驗(yàn)結(jié)果表明,這些新算法都是 Rystsorⅴ算法的優(yōu)化。
2021-04-28 15:49:513 標(biāo)記分布是一種新的機(jī)器學(xué)習(xí)范式,能很妤地解決某些標(biāo)記多義性問(wèn)題,可看作多標(biāo)記的泛化。傳統(tǒng)的單標(biāo)記學(xué)習(xí)和多標(biāo)記學(xué)習(xí)均可看作標(biāo)記分布學(xué)習(xí)的特例。已有的標(biāo)記分布學(xué)習(xí)算法中,基于算法改造的 AA-KNN
2021-05-13 11:46:3311 同步有界偏序自動(dòng)機(jī)的同步性問(wèn)題研究
2021-06-15 14:24:525 基于ReliefF剪枝的多標(biāo)記分類(lèi)算法綜述
2021-06-24 14:48:3412 自動(dòng)機(jī)器學(xué)習(xí)綜述 自從計(jì)算機(jī)時(shí)代開(kāi)始,科學(xué)家和工程師們就一直想知道如何像人類(lèi)一樣,給計(jì)算機(jī)注入學(xué)習(xí)的能力。艾倫·圖靈是第一批提出智能理論的科學(xué)家之一,該理論設(shè)想有一天計(jì)算機(jī)能夠達(dá)到與人類(lèi)同等的智能
2021-09-01 14:29:504091 直線馬達(dá)加持的全自動(dòng)機(jī)械式停車(chē)庫(kù)。為了解決停車(chē)難問(wèn)題,幫助更多人解決此問(wèn)題,很多地方都給出了解決方案,修建立體式停車(chē)場(chǎng),石家莊的這種全自動(dòng)機(jī)械式停車(chē)庫(kù)非常方便。
2021-09-23 15:13:09656 AutoML(自動(dòng)機(jī)器學(xué)習(xí))是深度學(xué)習(xí)的新方式,利用大數(shù)據(jù)分析、高性能計(jì)算、數(shù)據(jù)管理、算法、邊緣計(jì)算等技術(shù)。有了AutoML,我們就不再需要設(shè)計(jì)復(fù)雜的深度學(xué)習(xí)網(wǎng)絡(luò),用于數(shù)據(jù)采集、數(shù)據(jù)預(yù)處理、優(yōu)化
2021-12-09 10:40:19244 
隨著市場(chǎng)發(fā)展以及降低成本的需求不斷提升,全自動(dòng)機(jī)器人激光焊接在市場(chǎng)中需求,獲得企業(yè)的青睞與選擇,全自動(dòng)機(jī)器人激光焊接不僅節(jié)約成本,而且技術(shù)效果好,機(jī)器人反應(yīng)靈敏、與激光器有效配合,通過(guò)光纖傳輸后使每個(gè)焊點(diǎn)效果趨向一致,并保證焊接焦點(diǎn)位置。
2022-02-10 09:01:232207 電子發(fā)燒友網(wǎng)站提供《帶有LDR和DHT22傳感器及Arduino的家用自動(dòng)機(jī).zip》資料免費(fèi)下載
2022-11-10 14:44:170 電子發(fā)燒友網(wǎng)站提供《Ultra96 V2上基于標(biāo)記的增強(qiáng)現(xiàn)實(shí).zip》資料免費(fèi)下載
2022-11-16 17:04:151 電子發(fā)燒友網(wǎng)站提供《制作鋼琴瓷磚自動(dòng)機(jī)器人.zip》資料免費(fèi)下載
2022-11-29 10:35:080 該項(xiàng)目使用I2C 128×64 OLED顯示由Arduino Nano供電的微型細(xì)胞自動(dòng)機(jī)。
2022-12-02 16:58:280 該項(xiàng)目使用I2C 128×64 OLED顯示由Arduino Nano供電的微型細(xì)胞自動(dòng)機(jī)。
2022-12-06 10:22:250 然后我們?cè)噲D將他們組裝起來(lái),因?yàn)橐婚_(kāi)始實(shí)現(xiàn)的都是零件(子函數(shù))部分,本文主要介紹在main函數(shù)中運(yùn)行的自動(dòng)機(jī)。
2023-05-23 11:18:19434 
電子發(fā)燒友網(wǎng)站提供《基于Arduino和OLED元胞自動(dòng)機(jī).zip》資料免費(fèi)下載
2023-06-20 11:02:450 增強(qiáng)現(xiàn)實(shí)和虛擬現(xiàn)實(shí)的區(qū)別 增強(qiáng)現(xiàn)實(shí)和虛擬現(xiàn)實(shí)有以下區(qū)別: 1. 概念不同:增強(qiáng)現(xiàn)實(shí)是將真實(shí)世界的實(shí)境與虛擬世界的信息相結(jié)合的技術(shù),而虛擬現(xiàn)實(shí)是一種通過(guò)計(jì)算機(jī)生成的完全虛假的環(huán)境。 2. 應(yīng)用場(chǎng)
2023-08-02 18:40:575389 增強(qiáng)現(xiàn)實(shí)和混合現(xiàn)實(shí)的區(qū)別 現(xiàn)代科技的發(fā)展為人們的生活帶來(lái)了很多便利與樂(lè)趣,增強(qiáng)現(xiàn)實(shí)和混合現(xiàn)實(shí)就是其中代表性比較強(qiáng)的兩項(xiàng)技術(shù)。雖然這兩個(gè)技術(shù)在功能和應(yīng)用方面都有很多的共同點(diǎn),但在實(shí)際使用中也存在著明顯
2023-08-12 15:19:531466 增強(qiáng)現(xiàn)實(shí)和擴(kuò)展現(xiàn)實(shí)的區(qū)別 隨著技術(shù)的不斷進(jìn)步,現(xiàn)實(shí)和虛擬之間的界限越來(lái)越模糊。現(xiàn)在,我們經(jīng)常聽(tīng)到的是增強(qiáng)現(xiàn)實(shí)和擴(kuò)展現(xiàn)實(shí)這兩個(gè)概念。它們似乎是一回事,但實(shí)際上它們之間有很大的區(qū)別,本文將詳細(xì)介紹增強(qiáng)
2023-08-12 15:23:401247
 電子發(fā)燒友App
電子發(fā)燒友App


























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論