 電子發(fā)燒友App
電子發(fā)燒友App


基于Motionchip的直流無(wú)刷伺服電機(jī)運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)和運(yùn)用
在傳統(tǒng)的電機(jī)伺服控制裝置中,一般采用一個(gè)或多個(gè)單片機(jī)作為伺服控制的核心處理器。由于這種伺服控制器外圍電路復(fù)雜,計(jì)算速度慢,從而導(dǎo)致控制效果不理想。近年來(lái),許多新的電機(jī)控制算法被研究并運(yùn)用于電機(jī)控制系統(tǒng)中,如矢量控制、直接轉(zhuǎn)矩控制等。隨著這些控制算法的日益復(fù)雜,必須具備高速運(yùn)算能力的處理器才能實(shí)現(xiàn)實(shí)時(shí)計(jì)算和控制。為了適應(yīng)這種需要,國(guó)外許多公司開發(fā)了控制電機(jī)專用的高檔單片機(jī)和數(shù)字信號(hào)處理器(DSP)。現(xiàn)在,通常使用的伺服控制器的控制核心部分大都由DSP和大規(guī)模可編程邏輯器件組成,這種方案可以根據(jù)不同需要,靈活的設(shè)計(jì)出性能很好的專用伺服控制器,但是一般研制周期都比較長(zhǎng)。
?


相關(guān)推薦
基于Motionchip的直流無(wú)刷伺服電機(jī)運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
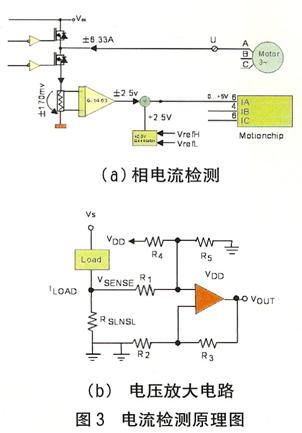
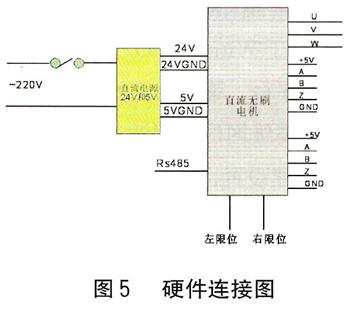
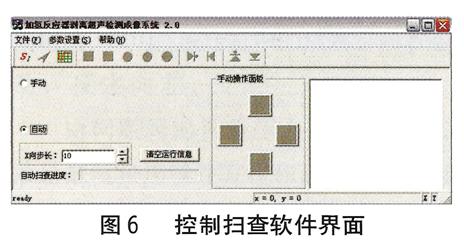
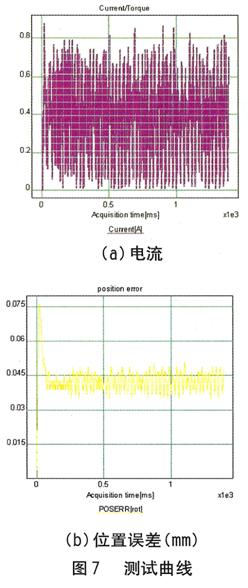
Motionchip是一種性能優(yōu)異的專用運(yùn)動(dòng)控制芯片,擴(kuò)展容易,使用方便。本文基于該芯片設(shè)計(jì)了一款可用于直流有刷/無(wú)刷伺服電機(jī)的智能伺服驅(qū)動(dòng)器,并將該驅(qū)動(dòng)器運(yùn)用到加氫反應(yīng)器超聲檢測(cè)成像系統(tǒng)中,上位
2014-05-19 10:38:20 3753
3753
3753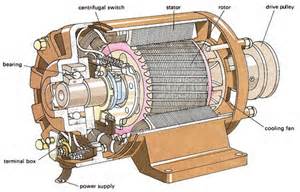
基于直流無(wú)刷伺服電機(jī)的的運(yùn)動(dòng)反饋控制系統(tǒng)的設(shè)計(jì)方案
而運(yùn)動(dòng)控制(包括軌跡控制、伺服控制)與順序控制、過(guò)程控制,傳動(dòng)控制并列為典型的控制模式,是一直以來(lái)扮演重要支柱技術(shù)角色的自動(dòng)控制系統(tǒng),在許多高科技領(lǐng)域得到了非常廣泛的應(yīng)用,如激光加工,機(jī)器人
2020-06-26 09:27:002058
2058
伺服控制系統(tǒng)是由哪些部分組成的
伺服控制系統(tǒng)組成:運(yùn)動(dòng)控制卡運(yùn)動(dòng)控制卡是一種上位控制單元,可以控制伺服電機(jī),是基于PC總線,利用高性能微處理器(如DSP)及大規(guī)模可編程器件實(shí)現(xiàn)多個(gè)伺服電機(jī)的多軸協(xié)調(diào)控制的一種高性能的步進(jìn)/伺服電機(jī)運(yùn)動(dòng)
2021-09-09 06:25:07
伺服電機(jī)的運(yùn)動(dòng)伺服是由哪幾環(huán)組成的
伺服電機(jī)的運(yùn)動(dòng)伺服是由哪幾環(huán)組成的?PID對(duì)三環(huán)控制系統(tǒng)的差值調(diào)節(jié)有何影響?
2021-09-28 06:22:32
伺服驅(qū)動(dòng)器直流有刷無(wú)刷通用伺服電機(jī)控制器
直流無(wú)刷伺服電機(jī)驅(qū)動(dòng)器RMC-DC36.10S1廣泛應(yīng)用于醫(yī)療器械、機(jī)器人、儀器儀表、雕刻機(jī)、自動(dòng)控制的教學(xué)設(shè)備,激光打標(biāo)機(jī),激光雕刻機(jī)、半導(dǎo)體設(shè)備、小型數(shù)控機(jī)床等需要高精度控制的設(shè)備上。 DC無(wú)
2011-05-11 09:30:05
無(wú)刷伺服電機(jī)的控制方式有哪幾種
無(wú)刷電機(jī)主要由哪幾部分組成?無(wú)刷電機(jī)是怎樣進(jìn)行工作的?無(wú)刷伺服電機(jī)的控制方式有哪幾種?
2021-08-09 09:02:06
無(wú)刷直流控制系統(tǒng)-夏長(zhǎng)亮完整版
本帖最后由 Nancyfans 于 2019-8-21 15:02 編輯
推薦課程:張飛軟硬開源:基于STM32的BLDC直流無(wú)刷電機(jī)驅(qū)動(dòng)器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd 無(wú)刷直流控制系統(tǒng)-夏長(zhǎng)亮完整版目錄
2016-01-26 09:55:36
無(wú)刷直流(BLDC)電機(jī)的工作原理是什么
無(wú)刷直流(BLDC)電機(jī)的工作原理是什么?無(wú)刷直流(BLDC)電機(jī)是如何進(jìn)行換向的?無(wú)刷直流(BLDC)電機(jī)的定子與轉(zhuǎn)子產(chǎn)生的磁場(chǎng)具有相同的頻率嗎?
2021-08-30 07:26:36
無(wú)刷直流電機(jī)控制系統(tǒng)經(jīng)驗(yàn)
dsPIC30F6010的直流無(wú)刷電機(jī)控制系統(tǒng) 基于dsPIC30F6010微處理器的無(wú)刷直流電機(jī)控制系統(tǒng),分析了永磁無(wú)刷直流電動(dòng)機(jī)的工作原理,并建立數(shù)學(xué)模型,然后根據(jù)原理和模型制定出無(wú)刷直流
2016-01-04 14:05:39
無(wú)刷直流電機(jī)與有刷直流電機(jī)的對(duì)比
無(wú)刷直流電機(jī)與有刷直流電機(jī)的對(duì)比直流有刷電機(jī)和無(wú)刷電機(jī)的區(qū)別是是否配置有常用的電刷換向器。有刷直流電機(jī)的換向一直是通過(guò)石墨電刷與安裝在轉(zhuǎn)子上的環(huán)形換向器相接觸來(lái)實(shí)現(xiàn)的。而直流無(wú)刷電機(jī)則通過(guò)霍爾傳感器
2020-03-16 16:08:14
無(wú)刷直流電機(jī)與永磁同步伺服電機(jī)的區(qū)別在什么地方?
無(wú)刷直流電機(jī)是什么?永磁同步伺服電機(jī)是什么?無(wú)刷直流電機(jī)與永磁同步伺服電機(jī)的區(qū)別在什么地方?
2021-07-20 06:58:25
無(wú)刷直流電機(jī)換相時(shí)其電流是怎樣變化的
無(wú)刷直流電機(jī)換相時(shí)其電流是怎樣變化的?有哪幾種情形?怎樣通過(guò)無(wú)刷直流電機(jī)開發(fā)板驅(qū)動(dòng)電機(jī)運(yùn)轉(zhuǎn)?
2021-09-16 06:47:03
無(wú)刷直流電機(jī)是如何進(jìn)行換向的
什么是無(wú)刷直流電機(jī)?無(wú)刷直流電機(jī)是由哪些部分組成的?無(wú)刷直流電機(jī)的換向原理與工作原理是什么?
2021-08-17 07:51:54
無(wú)刷直流電機(jī)的全數(shù)字控制系統(tǒng)設(shè)計(jì)
以DSP為基礎(chǔ),建立無(wú)刷直流電機(jī)雙閉環(huán)控制系統(tǒng),以TMS320LF2407為控制核心,通過(guò)無(wú)刷直流電機(jī),主電路,轉(zhuǎn)子位置檢測(cè),電流采樣,電壓采樣,過(guò)流檢測(cè),隔離電路,IPM故障檢測(cè)構(gòu)成了全數(shù)字控制系統(tǒng)。并設(shè)計(jì)了簡(jiǎn)單的算法,用軟件計(jì)算電動(dòng)機(jī)速度。簡(jiǎn)化了系統(tǒng)硬件結(jié)構(gòu)。
2016-01-18 15:43:53
無(wú)刷直流電機(jī)的轉(zhuǎn)子是怎么轉(zhuǎn)動(dòng)的呢?
無(wú)刷直流電機(jī)的基本工作原理是什么?無(wú)刷直流電機(jī)的轉(zhuǎn)子是怎么轉(zhuǎn)動(dòng)的呢?怎樣確定換向時(shí)機(jī)?怎樣控制無(wú)刷直流電機(jī)的方向和轉(zhuǎn)速?
2021-07-23 09:34:44
無(wú)刷直流電機(jī)閉環(huán)控制系統(tǒng)設(shè)計(jì)及軟硬件實(shí)現(xiàn)
/無(wú)刷直流電機(jī)閉環(huán)控制系統(tǒng)設(shè)計(jì)及軟硬件實(shí)現(xiàn)">無(wú)刷直流電機(jī)閉環(huán)控制系統(tǒng)設(shè)計(jì)及軟硬件實(shí)現(xiàn).rar</a></font></font>[/hide]`
2009-12-18 11:02:54
無(wú)刷直流電機(jī)驅(qū)動(dòng)的六要素
無(wú)刷直流電機(jī)常用大功率晶體管、MOSFET/IGBT、反饋元件/控制、模擬數(shù)字轉(zhuǎn)換器、MCU、模擬功率/調(diào)機(jī)器/基準(zhǔn)等是無(wú)刷直流電機(jī)驅(qū)動(dòng)的基本系統(tǒng)要求。1.大功率晶體管。這些通常是場(chǎng)效應(yīng)管
2016-01-06 10:41:56
無(wú)刷直流電機(jī)系統(tǒng)該怎樣去設(shè)計(jì)?
無(wú)刷直流電機(jī)系統(tǒng)是由哪些部分組成的?無(wú)刷直流電機(jī)系統(tǒng)該怎樣去設(shè)計(jì)?
2021-07-27 07:34:14
無(wú)刷云臺(tái)電機(jī)SVPWM正弦波控制
最近我們正在做無(wú)刷云臺(tái)項(xiàng)目,需要時(shí)使用到無(wú)刷直流電機(jī)的角度控制。首先需要實(shí)現(xiàn)單個(gè)無(wú)刷直流電機(jī)BLDC的精準(zhǔn)角度控制,意向是使用ST官方提供的無(wú)刷電機(jī)控制解決方案--矢量控制系統(tǒng)FOC程序庫(kù),實(shí)現(xiàn)
2016-03-23 18:38:32
無(wú)感無(wú)刷直流電機(jī)控制系統(tǒng)-變頻空調(diào)
主要介紹了使用無(wú)感無(wú)刷直流電機(jī)作為變頻空調(diào)的壓縮機(jī)的優(yōu)越性。詳細(xì)的描述了反電動(dòng)勢(shì)的檢測(cè)基本原理和啟發(fā)方法。以及用無(wú)感無(wú)刷直流電機(jī)做壓縮機(jī)的硬件的結(jié)構(gòu),軟件實(shí)現(xiàn)方法。
2016-01-15 15:56:06
無(wú)感無(wú)刷直流電機(jī)的小成本控制系統(tǒng)
MCU+PLD方式組成控制系統(tǒng)的核心,利用PLD數(shù)字邏輯功能,分擔(dān)MCU的邏輯運(yùn)算壓力,使MCU和PLD的功能都得到了最大程度的發(fā)揮。對(duì)無(wú)感無(wú)刷直流電機(jī)控制系統(tǒng)分析了換相控制策略和閉環(huán)調(diào)速,最后通過(guò)仿真和實(shí)驗(yàn)
2016-01-15 15:35:26
直流無(wú)刷驅(qū)動(dòng)器的正反轉(zhuǎn)控制以及轉(zhuǎn)速是如何的呢?
可以配合集電極開路的PLC等控制單元;當(dāng)“DIR”與端子“COM”不接通時(shí)電機(jī)順時(shí)針?lè)较蜻\(yùn)行(面對(duì)電機(jī)軸),反之則逆時(shí)針?lè)较蜻\(yùn)轉(zhuǎn);為避免直流無(wú)刷驅(qū)動(dòng)器的損壞,在改變電機(jī)轉(zhuǎn)向時(shí)應(yīng)先使電機(jī)停止運(yùn)動(dòng)后再操作
2016-05-20 15:14:49
直流電機(jī)運(yùn)動(dòng)控制的過(guò)程中怎么實(shí)現(xiàn)高精度的位置控制?
直流電機(jī)運(yùn)動(dòng)控制的過(guò)程中怎么實(shí)現(xiàn)高精度的位置控制
2023-10-11 06:23:00
AMEYA360設(shè)計(jì)方案丨無(wú)刷直流 (BLDC) 電機(jī)
定子繞組) 的形狀為梯形這樣的方式,選擇永磁體的磁化強(qiáng)度及其在轉(zhuǎn)子上的位移。可支持長(zhǎng)方形的三相電壓系統(tǒng),用于創(chuàng)建低扭矩波動(dòng)的旋轉(zhuǎn)磁場(chǎng)。使用無(wú)刷直流 (BLDC) 電機(jī)的應(yīng)用,如:· 風(fēng)扇· 泵· 暖通空調(diào)鼓風(fēng)機(jī)和壓縮機(jī)· 計(jì)算機(jī)磁盤驅(qū)動(dòng)器和外圍設(shè)備· 家用電器· 機(jī)器人· 伺服系統(tǒng)· 縫紉機(jī)· 跑步機(jī)
2018-04-10 16:11:58
DSP控制的無(wú)刷直流電機(jī),位置控制系統(tǒng)
我想用TMS320F2818控制無(wú)刷直流電機(jī),驅(qū)動(dòng)一根軸(連著一塊板子)轉(zhuǎn)動(dòng)到某個(gè)位置停下,但是這個(gè)板子受到很大的力且不恒定,這樣的話,電機(jī)還能保持在這個(gè)位置嗎?
2017-04-27 15:32:18
ZN-758HGJ直流電動(dòng)機(jī)運(yùn)動(dòng)控制實(shí)驗(yàn)系統(tǒng)功能特點(diǎn)及組成
電動(dòng)機(jī)—直流發(fā)電機(jī)機(jī)組額定功率為1.5KW(采用晶閘管可控整流調(diào)壓調(diào)速)。副直流電動(dòng)機(jī)機(jī)組額定功率300W(采用H橋VDMOS管PWM調(diào)壓調(diào)速)。ZN-758HGJ直流電動(dòng)機(jī)運(yùn)動(dòng)控制實(shí)驗(yàn)系統(tǒng)設(shè)有計(jì)算機(jī)控制接口,PC
2021-08-26 12:50:48
stm8l單片機(jī)是如何控制電機(jī)運(yùn)動(dòng)的
stm8l單片機(jī)是如何控制電機(jī)運(yùn)動(dòng)的?stm8l單片機(jī)控制電機(jī)運(yùn)動(dòng)的程序?yàn)槭裁丛诖?b class="flag-6" style="color: red">電機(jī)上就不可以運(yùn)行?
2021-08-11 08:13:28
【Aworks申請(qǐng)】無(wú)刷直流電動(dòng)機(jī)控制系統(tǒng)
,從而控制電機(jī)轉(zhuǎn)動(dòng),利用PWM來(lái)對(duì)電機(jī)進(jìn)行調(diào)速。同時(shí)利用ADC實(shí)時(shí)采集相電流,將電流值反饋給控制系統(tǒng),從而實(shí)現(xiàn)電流環(huán)的控制,并且可以根據(jù)電流值對(duì)系統(tǒng)進(jìn)行過(guò)流保護(hù),最終要實(shí)現(xiàn)一個(gè)雙閉環(huán)控制帶過(guò)流保護(hù)的無(wú)刷直流電機(jī)控制系統(tǒng)。
2015-07-02 17:35:24
【原創(chuàng)分享】無(wú)刷直流電機(jī)控制簡(jiǎn)介
本帖最后由 松山歸人 于 2021-6-4 09:37 編輯
講解人:趙云老師(張飛實(shí)戰(zhàn)電子高級(jí)工程師)01.概述從簡(jiǎn)單的鉆機(jī)到復(fù)雜的工業(yè)機(jī)器人,許多機(jī)器設(shè)備都使用無(wú)刷直流電機(jī)將電能轉(zhuǎn)換為旋轉(zhuǎn)運(yùn)動(dòng)
2021-06-02 10:58:38
【秀秀資源】永磁同步電機(jī)和無(wú)刷直流電機(jī)干貨資料分享
://www.xsypw.cn/soft/study/ms/2017/20170129478932.html09.無(wú)刷直流電機(jī)模糊PI控制系統(tǒng)設(shè)計(jì)http://www.xsypw.cn/soft/study/ms
2017-02-15 18:32:00
【資料】無(wú)刷直流電機(jī)運(yùn)行原理與基本控制方法
主要介紹無(wú)刷直流電機(jī)運(yùn)行原理、基本控制方法。目錄如下:回復(fù)帖子查看資料下載鏈接:[hide][/hide]
2021-08-05 11:11:02
【資料】無(wú)刷直流電機(jī)運(yùn)行原理與基本控制方法
主要內(nèi)容:一、幾個(gè)術(shù)語(yǔ)解釋(極對(duì)數(shù)、相數(shù)、電角度、電角頻率、相電壓、線電壓、反電動(dòng)勢(shì))二、無(wú)刷直流電機(jī)的運(yùn)行原理(運(yùn)行原理、數(shù)學(xué)模型)三、無(wú)刷直流電機(jī)的基本控制方法(各參數(shù)相互關(guān)系、換流過(guò)程與換流模式)四、車用無(wú)刷直流電機(jī)及其控制系統(tǒng)(基本控制、弱磁控制)
2021-07-24 13:34:42
一種用過(guò)PWM調(diào)速的無(wú)刷直流電機(jī)調(diào)速控制系統(tǒng)
無(wú)刷直流電機(jī)調(diào)速系統(tǒng)設(shè)這個(gè)無(wú)刷直流電機(jī)的控制系統(tǒng)由驅(qū)動(dòng)電路來(lái)驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng),通過(guò)電流的檢測(cè)和位置檢測(cè)得到的反饋信號(hào)送到FPGA中心進(jìn)行處理,再通過(guò)調(diào)節(jié)脈沖寬度(PWM)來(lái)控制無(wú)刷直流電機(jī),從而達(dá)到調(diào)速
2016-01-05 14:16:15
專用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)理念是什么
專用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)理念概括步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)化為角位移或線位移的電磁機(jī)械裝置。步進(jìn)電機(jī)的穩(wěn)定性和可靠性直接影響到工業(yè)控制領(lǐng)域的精度,特別是在點(diǎn)膠點(diǎn)焊等高精度運(yùn)動(dòng)控制系統(tǒng)中,對(duì)于步進(jìn)電機(jī)的精度和穩(wěn)定性要求更高。所以說(shuō),對(duì)于步進(jìn)電機(jī)控制
2021-09-07 08:21:11
交流伺服電機(jī)和無(wú)刷直流伺服電機(jī)的區(qū)別是什么
伺服電機(jī)的工作原理交流伺服電機(jī)和無(wú)刷直流伺服電機(jī)在功能上的區(qū)別永磁交流伺服電機(jī)同直流伺服電動(dòng)機(jī)比較的主要優(yōu)點(diǎn)
2021-01-28 06:13:25
什么是無(wú)刷直流電機(jī)(BLDC)以及它的應(yīng)用
的帶動(dòng)控制中,都有無(wú)刷直流電機(jī)的身影。應(yīng)用領(lǐng)域二,工業(yè)控制領(lǐng)域。近些年,由于無(wú)刷直流電機(jī)大規(guī)模的研發(fā)和技術(shù)的逐漸成熟,其驅(qū)動(dòng)系統(tǒng)在工業(yè)生產(chǎn)中的分布范圍也隨之?dāng)U大,已逐步成為工業(yè)用電動(dòng)機(jī)的發(fā)展主流。圍繞降低
2019-07-04 07:00:00
什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)控制系統(tǒng)的任務(wù)是什么?
什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)控制系統(tǒng)的任務(wù)是什么?
2021-10-29 07:40:48
使用無(wú)刷伺服電機(jī)
。 在過(guò)去的十年甚至二十年中,伺服電機(jī)市場(chǎng)已經(jīng)從有刷伺服轉(zhuǎn)變成無(wú)刷伺服的市場(chǎng),這主要是由無(wú)刷伺服的低維修率和高穩(wěn)定性所決定的。在這十幾年中,驅(qū)動(dòng)部分在電路和系統(tǒng)方面的技術(shù)已發(fā)展的非常完善。控制方式...
2021-09-07 07:14:40
做一個(gè)同時(shí)控制兩臺(tái)無(wú)刷直流電機(jī)的控制系統(tǒng)
想一個(gè)新型的無(wú)刷直流電機(jī),因?yàn)?b class="flag-6" style="color: red">無(wú)刷直流電機(jī)的轉(zhuǎn)矩脈動(dòng)較大,所以想通過(guò)兩臺(tái)電機(jī)的轉(zhuǎn)矩脈動(dòng)相互抵消的方法實(shí)現(xiàn)。說(shuō)是控制兩臺(tái)電機(jī),其實(shí)就是在做了一個(gè)新的樣機(jī),在里面封裝了兩個(gè)定、轉(zhuǎn)子系統(tǒng),現(xiàn)在我要做
2016-12-21 16:00:41
關(guān)于labview運(yùn)動(dòng)控制
需要做一個(gè)基于labview 加運(yùn)動(dòng)控制卡的伺服電機(jī)運(yùn)動(dòng)控制系統(tǒng),請(qǐng)問(wèn)PCI-7831R 這塊板是運(yùn)動(dòng)控制卡嗎,可不可以用來(lái)做,百度了是什么多功能RIO,新手,不太懂求指教
2015-12-09 18:15:35
四軸無(wú)刷直流電機(jī)驅(qū)動(dòng)的控制設(shè)計(jì)
全橋驅(qū)動(dòng)電路及控制程序。完成了對(duì)四軸飛行器無(wú)位置傳感器無(wú)刷直流電機(jī)的驅(qū)動(dòng)控制設(shè)計(jì)。該設(shè)計(jì)電路結(jié)構(gòu)簡(jiǎn)單,成本低、電機(jī)運(yùn)行穩(wěn)定可靠,實(shí)現(xiàn)了電機(jī)連續(xù)運(yùn)轉(zhuǎn)。
2016-01-15 16:29:28
四軸飛行器無(wú)刷直流電機(jī)驅(qū)動(dòng)控制設(shè)計(jì)的實(shí)現(xiàn)
直流電機(jī)。 無(wú)刷直流電機(jī)驅(qū)動(dòng)控制系統(tǒng)包括驅(qū)動(dòng)電路和系統(tǒng)程序控制兩部分。采用功率管的開關(guān)特性構(gòu)成三相全橋驅(qū)動(dòng)電路,之后使用DSP作為主控芯片,借助其強(qiáng)大的運(yùn)算處理能力,實(shí)現(xiàn)電機(jī)的啟動(dòng)與控制,但電路結(jié)構(gòu)復(fù)雜
2018-10-08 15:13:09
基于DSP的無(wú)刷直流電機(jī)控制系統(tǒng)的設(shè)計(jì)
資料分享基于DSP的無(wú)刷直流電機(jī)控制系統(tǒng)的設(shè)計(jì)
2015-11-06 12:35:03
基于DSP的數(shù)字伺服機(jī)構(gòu)控制系統(tǒng)設(shè)計(jì)
為滿足對(duì)直流無(wú)刷伺服機(jī)構(gòu)的數(shù)字化控制,介紹了一種數(shù)字無(wú)刷直流電機(jī)伺服控制系統(tǒng),以TMS320F2812型DSP為控制核心,包括中央處理電路,驅(qū)動(dòng)電路,反饋電路等實(shí)現(xiàn)對(duì)直流無(wú)刷電機(jī)伺服系統(tǒng)的控制。該系統(tǒng)
2014-11-07 14:40:50
基于DSP的數(shù)字伺服機(jī)構(gòu)控制系統(tǒng)設(shè)計(jì)
優(yōu)點(diǎn),在伺服系統(tǒng)中應(yīng)用越來(lái)越廣泛。使用數(shù)字信號(hào)處理器(DSP)實(shí)現(xiàn)無(wú)刷直流電機(jī)的伺服系統(tǒng)可以只用一片DSP實(shí)現(xiàn)比較復(fù)雜的算法,控制精度高,可對(duì)伺服系統(tǒng)進(jìn)行更有效的控制。文中以TMS320F2812為
2012-08-08 09:29:57
基于FPGA的控制系統(tǒng)永磁無(wú)刷直流電機(jī)控制電路設(shè)計(jì)
的片上可編程系統(tǒng)(SoPC)。這將成為下一代高性能伺服控制器集成化設(shè)計(jì)的一個(gè)趨勢(shì)。 下面針對(duì)永磁無(wú)刷直流電機(jī)模塊化設(shè)計(jì)的思想,介紹基于FPGA的控制系統(tǒng)的電子電路設(shè)計(jì)方法,其控制系統(tǒng)結(jié)構(gòu)如圖1所示。圖1
2016-02-01 14:44:30
基于HXS320F28034無(wú)刷直流電機(jī)控制系統(tǒng)設(shè)計(jì)
設(shè)計(jì),提高了系統(tǒng)的可靠性,降低了成本,并對(duì)無(wú)刷直流電機(jī)的普及應(yīng)用具有良好的前景。2 系統(tǒng)設(shè)計(jì)方案該系統(tǒng)設(shè)計(jì)采用三相Y型永磁方波無(wú)刷電機(jī)PWM控制方案,通電方式為兩兩通電。它采用全數(shù)字閉環(huán)控制。其中,電流環(huán)
2021-06-16 10:24:18
基于LabVIEW設(shè)計(jì)一個(gè)直流有刷電機(jī)PID調(diào)試及控制助手
基于LabVIEW的電機(jī)測(cè)試系統(tǒng)研究??本設(shè)計(jì)基于LabVIEW設(shè)計(jì)一個(gè)直流有刷電機(jī)PID調(diào)試及控制助手,實(shí)現(xiàn)PID參數(shù)調(diào)節(jié)及電機(jī)轉(zhuǎn)速及位置的控制。系統(tǒng)下位機(jī)采用STM32F103作為直流有刷電機(jī)
2022-01-07 06:19:30
基于STM32無(wú)位置傳感器無(wú)刷直流電機(jī)控制C程序
請(qǐng)問(wèn)誰(shuí)做過(guò)基于STM32無(wú)位置傳感器無(wú)刷直流電機(jī)控制系統(tǒng),有沒有STM32無(wú)刷直流電機(jī)控制部分的C程序,發(fā)給我參考下吧。
2014-01-18 09:24:22
基于labview的電機(jī)運(yùn)動(dòng)控制
我想用pmac控制電機(jī)運(yùn)動(dòng),pmac與labview通信,并通過(guò)labview實(shí)時(shí)顯示電機(jī)運(yùn)動(dòng)狀況,請(qǐng)問(wèn)labview中如何采集信號(hào)?采集到的信號(hào)我想以波形圖的形式輸出并進(jìn)行分析
2017-05-09 16:05:49
基于單片機(jī)的電機(jī)運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
基于單片機(jī)的電機(jī)運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì),生物醫(yī)學(xué)信號(hào)指標(biāo)與人體的健康息息相關(guān),只有掌握其中規(guī)律才能更好的解決人體的健康問(wèn)題。隨著電子信息技術(shù)的發(fā)展和醫(yī)學(xué)的不斷進(jìn)步,人們對(duì)高精度便捷式生物醫(yī)學(xué)信號(hào)電子檢測(cè)設(shè)備的需求越來(lái)越高。而心率和步數(shù)又是人體的兩個(gè)重要指標(biāo)。
2021-07-14 07:44:30
基于單片機(jī)的航模無(wú)刷直流電機(jī)調(diào)速控制系統(tǒng)
以單片機(jī)為控制核心,分析無(wú)感無(wú)刷直流電機(jī)的位置檢測(cè)方法,PWM的調(diào)速方式,啟動(dòng)控制等。設(shè)計(jì)了航模無(wú)刷直流電機(jī)調(diào)速控制系統(tǒng)。
2016-01-14 10:23:40
如何去仿真一種永磁無(wú)刷直流電機(jī)控制系統(tǒng)
轉(zhuǎn)速/角度閉環(huán)控制普通PID控制模糊PID控制電機(jī)本體建模電機(jī)失步仿真永磁無(wú)刷直流電機(jī)控制系統(tǒng):電機(jī)抗飽和微分跟隨器神經(jīng)網(wǎng)絡(luò)PID控制速度閉環(huán)控制模糊控制(變論域和變權(quán)值)同步電機(jī)異步啟動(dòng)異步電機(jī)降壓?jiǎn)?..
2021-07-06 08:00:51
如何去實(shí)現(xiàn)對(duì)無(wú)刷直流電機(jī)的轉(zhuǎn)速和方向的控制?
無(wú)刷直流電機(jī)(BLDC)是什么?無(wú)刷直流電機(jī)有哪些特點(diǎn)?PWM調(diào)速的原理是什么?如何去實(shí)現(xiàn)對(duì)無(wú)刷直流電機(jī)的轉(zhuǎn)速和方向的控制?
2021-07-23 06:33:18
如何去開發(fā)一款基于DSPic33的直流無(wú)刷電機(jī)無(wú)傳感器控制系統(tǒng)?
如何去開發(fā)一款基于DSPic33的直流無(wú)刷電機(jī)無(wú)傳感器控制系統(tǒng)?直流無(wú)刷電機(jī)無(wú)傳感器控制系統(tǒng)的作用是什么?
2021-07-27 07:53:40
如何在多軸伺服控制系統(tǒng)中實(shí)現(xiàn)同步精密運(yùn)動(dòng)
在多軸伺服控制系統(tǒng)中實(shí)現(xiàn)同步精密運(yùn)動(dòng)
2021-01-27 07:45:40
如何設(shè)計(jì)電機(jī)控制算法來(lái)控制無(wú)刷直流電機(jī)的速度?
如何使用六步換向(梯形控制)控制無(wú)刷直流電動(dòng)機(jī)?如何設(shè)計(jì)電機(jī)控制算法來(lái)控制無(wú)刷直流電機(jī)的速度?PWM脈寬調(diào)制是如何控制無(wú)刷直流電機(jī)的速度的?
2021-07-21 06:55:46
工程師資料:電機(jī)控制技術(shù)應(yīng)用解決方案
設(shè)計(jì)與制作課程設(shè)計(jì)基于嵌入式ARM+Linux平臺(tái)的直流電機(jī)調(diào)速控制系統(tǒng)的設(shè)計(jì)無(wú)刷直流電機(jī)技術(shù)應(yīng)用方案:無(wú)刷直流電機(jī)的保護(hù)電路方案無(wú)刷直流電機(jī)雙閉環(huán)串級(jí)控制系統(tǒng)仿真研究基于IR2136的無(wú)刷直流電機(jī)
2014-12-17 14:37:15
怎樣去控制無(wú)刷直流電機(jī)的轉(zhuǎn)速?
無(wú)刷直流電機(jī)的結(jié)構(gòu)是由哪些部分組成的?無(wú)刷直流電機(jī)的電流換向電路是什么?怎樣去控制無(wú)刷直流電機(jī)的轉(zhuǎn)速?
2021-07-21 06:35:08
怎樣去設(shè)計(jì)一種基于單片機(jī)的無(wú)刷直流電機(jī)PID調(diào)速控制系統(tǒng)
如何對(duì)對(duì)無(wú)刷直流電機(jī)進(jìn)行加減速控制?怎樣去設(shè)計(jì)一種基于單片機(jī)的無(wú)刷直流電機(jī)PID調(diào)速控制系統(tǒng)?
2021-08-06 06:48:12
怎樣去設(shè)計(jì)一種基于單片機(jī)的無(wú)刷直流電機(jī)PID調(diào)速控制系統(tǒng)?
怎樣去設(shè)計(jì)一種基于單片機(jī)的無(wú)刷直流電機(jī)PID調(diào)速控制系統(tǒng)?其代碼程序該如何去編寫?
2021-07-23 08:19:12
怎樣去設(shè)計(jì)永磁無(wú)刷直流電動(dòng)機(jī)控制系統(tǒng)?
一種基于PIC18Fxx的永磁無(wú)刷直流電動(dòng)機(jī)控制系統(tǒng)的開發(fā)
2021-05-12 06:21:14
怎樣通過(guò)霍爾傳感器去控制無(wú)刷直流電機(jī)呢
什么是直流電機(jī)?有刷直流電機(jī)是怎樣工作的?無(wú)刷直流電機(jī)是怎樣工作的?怎樣通過(guò)霍爾傳感器去控制無(wú)刷直流電機(jī)呢?
2021-09-17 06:19:37
按照設(shè)定轉(zhuǎn)速值控制無(wú)刷直流電機(jī)運(yùn)轉(zhuǎn)
st12c5a60s2單片機(jī)通過(guò)調(diào)速,按照設(shè)定轉(zhuǎn)速值控制無(wú)刷直流電機(jī)運(yùn)轉(zhuǎn)。請(qǐng)問(wèn)為什么改變定時(shí)初始值,轉(zhuǎn)速不變么?請(qǐng)求各位指導(dǎo)。。
2016-09-23 22:55:23
無(wú)刷電機(jī)做位置伺服控制的精度問(wèn)題
如題無(wú)刷電機(jī)做位置伺服控制:無(wú)刷直流電機(jī)的極對(duì)數(shù)為1對(duì),電機(jī)的旋轉(zhuǎn)精度是不是正負(fù)60度。如果想要提高定位精度是不是選用極對(duì)數(shù)高的無(wú)刷機(jī)做位置伺服控制
2015-11-10 21:29:08
永磁無(wú)刷直流電機(jī)與永磁同步電機(jī)比較和分析
,經(jīng)過(guò)磁路設(shè)計(jì),可以獲得梯形波的氣隙磁密,定子繞組多采用集中整距繞組,因此感應(yīng)反電動(dòng)勢(shì)也是梯形波的。無(wú)刷直流電機(jī)的控制需要位置信息反饋,必須有位置傳感器或是采用無(wú)位置傳感器估計(jì)技術(shù),構(gòu)成自控式的調(diào)速系統(tǒng)
2014-01-22 09:55:33
求大神!關(guān)于無(wú)刷直流電動(dòng)機(jī)的控制系統(tǒng)設(shè)計(jì)。
做畢業(yè)設(shè)計(jì):無(wú)刷直流電動(dòng)機(jī)的控制系統(tǒng)設(shè)計(jì),最好有電路圖和程序。謝謝啦
2015-05-08 19:05:47
請(qǐng)問(wèn)交流伺服電機(jī)和無(wú)刷直流伺服電機(jī)在功能上有什么區(qū)別?
伺服電機(jī)和步進(jìn)電機(jī)的區(qū)別是什么?請(qǐng)問(wèn)交流伺服電機(jī)和無(wú)刷直流伺服電機(jī)在功能上有什么區(qū)別?
2021-10-08 08:40:56
請(qǐng)問(wèn)交流伺服電機(jī)和無(wú)刷直流伺服電機(jī)在功能上有什么區(qū)別?
伺服系統(tǒng)是什么?伺服系統(tǒng)的主要作用有哪些?伺服系統(tǒng)主要分為哪幾類?對(duì)伺服系統(tǒng)的基本要求有哪些? 交流伺服電機(jī)和無(wú)刷直流伺服電機(jī)在功能上有什么區(qū)別?
2021-07-13 08:15:33
請(qǐng)問(wèn)交流伺服電機(jī)和無(wú)刷直流伺服電機(jī)在功能上有什么區(qū)別?
什么是伺服電機(jī)?有幾種類型?工作特點(diǎn)是什么?請(qǐng)問(wèn)交流伺服電機(jī)和無(wú)刷直流伺服電機(jī)在功能上有什么區(qū)別?
2021-10-13 06:01:16
驅(qū)動(dòng)三相無(wú)刷無(wú)傳感電機(jī)的60V低壓伺服馬達(dá)控制器
最大輸出功率900W;v調(diào)速范圍:120rpm到13000rpm;v電機(jī)可正反轉(zhuǎn)控制;v具有過(guò)壓、欠壓、過(guò)流、過(guò)溫、霍爾信號(hào)非法等故障報(bào)警功能 如何實(shí)現(xiàn)直流無(wú)刷霍爾電機(jī)正/反轉(zhuǎn)控制(F/R)?通過(guò)控制
2011-05-11 09:38:28
可編程的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)研究介紹
本文提出一種在多用途步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)中應(yīng)用現(xiàn)場(chǎng)可編程的方法。
2009-04-02 15:27:10 20
20
20FPGA 在運(yùn)動(dòng)控制系統(tǒng)中的設(shè)計(jì)Design of FPGA
本文是在基于ARM+FPGA 的硬件平臺(tái)上進(jìn)行嵌入式運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì),ARM實(shí)現(xiàn)應(yīng)用管理,F(xiàn)PGA 實(shí)現(xiàn)插補(bǔ)運(yùn)算,發(fā)出脈沖到伺服驅(qū)動(dòng)系統(tǒng),形成運(yùn)動(dòng)指令控制伺服電機(jī)運(yùn) 轉(zhuǎn)等。文
2009-06-01 15:09:2727
27一種高性能的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
文中介紹了一種應(yīng)用于舞臺(tái)電腦燈控制系統(tǒng)的高性能步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng),以及步進(jìn)電機(jī)的細(xì)分驅(qū)動(dòng)原理和自適應(yīng)調(diào)速算法。使用細(xì)分驅(qū)動(dòng)可以顯著地減小步進(jìn)電機(jī)的低頻振動(dòng)
2009-08-13 09:11:0019
19深圳泰科智能MT系列無(wú)刷伺服系統(tǒng)-直流音圈電機(jī)驅(qū)動(dòng)器系統(tǒng)
泰科智能生產(chǎn)的MT無(wú)刷伺服系統(tǒng)主要由IDM系列伺服驅(qū)動(dòng)器與兼容NEMA法蘭尺寸的直流無(wú)刷伺服電機(jī)組合而成。采用直流供電,最大功率可達(dá)600W,主要應(yīng)用于小型移動(dòng)機(jī)器人、自動(dòng)化檢測(cè)組裝、醫(yī)療設(shè)備等行業(yè)
2023-04-19 11:07:03
深圳泰科伺服APX系列音圈無(wú)刷伺服電機(jī)驅(qū)動(dòng)器
,最大功率可達(dá)5KW。集可編程運(yùn)動(dòng)控制、PLC、伺服驅(qū)動(dòng)功能于一體。主要應(yīng)用于直線(DDL)、力矩(DDR)、音圈、有刷、無(wú)刷伺服電機(jī)的位置、速度、轉(zhuǎn)矩控制。它能以
2023-04-20 10:21:24
深圳泰科伺服MT系列無(wú)刷伺服系統(tǒng)-直流音圈電機(jī)驅(qū)動(dòng)器系統(tǒng)
泰科伺服生產(chǎn)的MT無(wú)刷伺服系統(tǒng)主要由IDM系列伺服驅(qū)動(dòng)器與兼容NEMA法蘭尺寸的直流無(wú)刷伺服電機(jī)組合而成。采用直流供電,最大功率可達(dá)600W,主要應(yīng)用于小型移動(dòng)機(jī)器人、自動(dòng)化檢測(cè)組裝、醫(yī)療設(shè)備等行業(yè)
2023-04-20 10:45:52
基于專用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
為了降低研發(fā)成本,減輕微控制器的壓力,提高系統(tǒng)的穩(wěn)定性和靈活性,提出了一種基于專用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)方案。該運(yùn)動(dòng)控制系統(tǒng)中主要采用了微控制器AT90CA
2012-05-30 15:08:3157
57基于MODBUS總線伺服電機(jī)運(yùn)動(dòng)控制方案
本文介紹使用MODBUS現(xiàn)場(chǎng)總線與伺服控制技術(shù)統(tǒng)一,實(shí)現(xiàn)設(shè)備遠(yuǎn)程監(jiān)控、電機(jī)運(yùn)動(dòng)控制配置與實(shí)現(xiàn)方案的方法。
2012-12-10 11:26:5210718
10718
基于DSP的永磁平面電機(jī)運(yùn)動(dòng)控制系統(tǒng)研究
基于DSP的永磁平面電機(jī)運(yùn)動(dòng)控制系統(tǒng)研究,有興趣的同學(xué)可以下載學(xué)習(xí)
2016-04-26 18:16:4218
18基于PLC的機(jī)器人伺服運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)詳解
本文首先介紹了伺服運(yùn)動(dòng)控制系統(tǒng)主要特點(diǎn),其次介紹了伺服運(yùn)動(dòng)控制系統(tǒng)工作原理,最后從機(jī)器人移動(dòng)方式的選擇與結(jié)構(gòu)設(shè)計(jì)、移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)及機(jī)器人的控制系統(tǒng)設(shè)計(jì)三個(gè)方面來(lái)詳細(xì)介紹機(jī)器人伺服運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì),具體的跟隨小編一起來(lái)了解一下。
2018-06-01 14:19:3614965
14965兩軸伺服電機(jī)運(yùn)動(dòng)控制器步進(jìn)直流電機(jī)控制器
(或伺 服)電機(jī)運(yùn)行的高可靠性高速數(shù)控系統(tǒng),具有操作簡(jiǎn)便、抗干擾、性能穩(wěn)定、功能強(qiáng)大、
經(jīng)濟(jì)實(shí)用 等特點(diǎn),是各種步進(jìn)(伺服)電機(jī)運(yùn)動(dòng)控制的高性能、低成本、簡(jiǎn)便易用的解決方案,同時(shí)可支持 數(shù)字量或開關(guān)量信號(hào)輸入輸出
(I/O)控制、2 路高速脈沖計(jì)數(shù),用來(lái)控制電
2023-04-03 15:09:060
0- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論