

















2.3.1 確定輸入、輸出隸數度函數
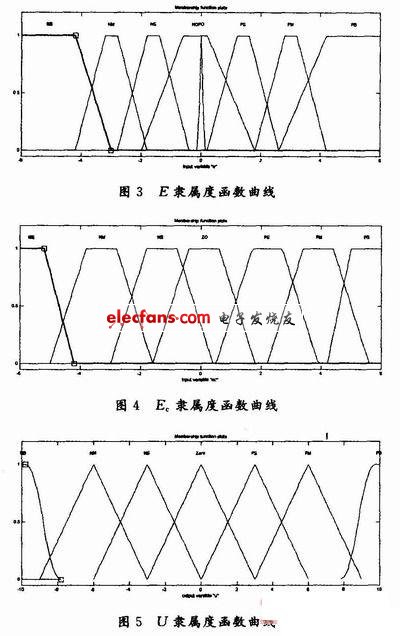
模糊控制器采用二維結構,以誤差e和誤差變化率ec作為模糊控制器的輸入信號,將模糊控制器進行模糊化、模糊邏輯推理、解模糊化等一系列操作,最后得到模糊控制器輸出控制信號量u。根據雙模糊控制器的原理,令其輸入為E和Ec,輸出為U,并確定輸入輸出的隸屬度函數。取E,Ec,U的模糊論域為[-6,6]。實際誤差e的變化范圍是[-0.5,0.5],實際誤差變化率ec的變化范圍是[-1,1],實際輸出控制量u的變化范圍是[0,10]。因此可確定偏差e的量化因子Ke=15,偏差變化率ec的量化因子Ke=6,控制量u的量化因子Ku=1。變量E的語言值設定為8個,即{負大(NB)、負中(NM)、負小(NS)、負零(NO)、正零(PO)、正小(PS)、正中(PM)、正大(PB)};將變量Ec的語言值設定為7個,即{負大(NB)、負中(NM)、負小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)};輸出變量U的語言值也設定為7個,即{負大(NB)、負中(NM)、負小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)},E,Ec,U的隸屬度函數選為梯形,如圖3~圖5所示。
2.3.2 模糊規則設計
雙模糊控制中的模糊控制器根據誤差和誤差變化率的不同狀態,工程設計人員的技術知識和實際操作經驗,建立合適的模糊規則表,得到模糊控制規則如表1所示。

3 基于Matlab/simulink的雙模糊控制系統仿真
3.1 建立模糊推理系統結構
在Matlab命令窗口鍵入fuzzy命令進入模糊邏輯工具箱,在FIS Editor窗口的Edit菜單下確定輸入、輸出變量的論域范圍和各個語言變量的隸屬函數曲線等參數,雙擊每個圖標就可以進行編輯,得到模糊控制器的文件。
3.2 建立模糊控制規則
用Edit菜單下的rules打開模糊規則編輯器確定“IF…THEN”形式的模糊控制規則。u共有控制規則56條,每條規則的加權值都缺省為1,推理算法為max-min合成法,解模糊方法采用取重心法。將設計好的模糊控制器保存在一個用戶自己定義的文件,后綴為fis。









 工商網監
工商網監
用戶評論
共 0 條評論