雷達的配套設備控制電路數字化設計方案
汽油發電機組是某型雷達的配套設備。由于機組工作時的強烈振動易使電位器調定位置改變,引起保護電路的基準發生變化,使機組不能正常工作。
現代電子產品中越來越多地采用數字電路和計算機程序控制。數字電路的優點是抗干擾能力強、工作穩定,可有效避免因元器件參數變化造成的設備性能下降。采用計算機程序控制后,可以將必要的參數固化在程序中或存儲在非易失性存儲器中,從根本上解決了因設置基準變化造成的工作異常。因此,針對某型汽油發電機組在使用中發現的問題,提出了采用數字電路和計算機程序控制對機組控制保護電路進行改進設計。
1 設計分析
1.1 控制保護電路原理框圖
某型汽油發電機組控制保護電路原理框圖如圖1所示,PWM控制時序如圖2所示。
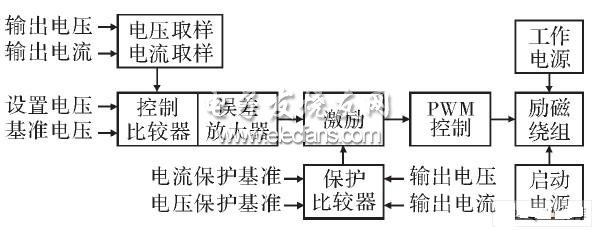
圖1 控制保護電路原理框圖
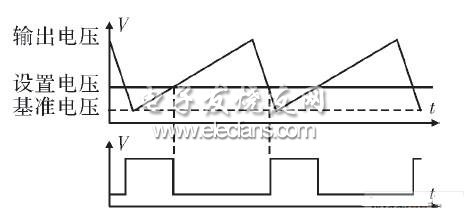
圖2 PWM控制時序
1.2 控制保護過程分析
(1)輸出電壓設置。
圖2中基準電壓為箝位電壓。如圖2所示,當調節電壓設置電位器使設置電壓上升或下降時,控制比較器輸出脈沖將變寬或變窄,發電機勵磁繞組導通時間隨之變化,發電機輸出電壓也將按比例上升或下降,直至到達穩定狀態。
(2)輸出電壓穩定。
發電機輸出電壓,經電壓互感器取樣后反饋到控制比較器。當設置電壓固定且沒有負載變化引起輸出電壓變化時,控制比較器將輸出寬度固定的脈沖控制激勵管和功率管接通勵磁繞組。由于勵磁繞組導通時間固定,輸出電壓處于一個穩定值。
再如圖2所示,當發電機輸出電壓發生變化時,由于基準電壓與設置電壓不變,控制比較器將調整輸出脈沖寬度,最終將使輸出電壓重新穩定在設置值上。
(3)輸出保護。
發電機輸出電壓與輸出電流,經電壓互感器和電流互感器取樣后接入到保護比較器。當發電機輸出電壓高于預置的輸出電壓上限或低于預置的輸出電壓下限、輸出電流大于預置的輸出電流上限時,保護比較器的輸出強行使激勵管截止,控制比較器輸出信號無效,勵磁繞組導通控制功率管無輸入激勵信號也處于截止狀態,使勵磁繞組無勵磁電流,發電機停止輸出。
1.3 自動控制原理分析
綜上所述,某型汽油發電機組控制保護電路,是一個典型的一階閉環自動控制系統。由于在控制比較器輸入端引入了主要由負載變化引起的輸出擾動,所以是一個基于擾動補償的一階復合閉環自動控制系統。發電機組控制保護電路自動控制原理框圖,如圖3所示。
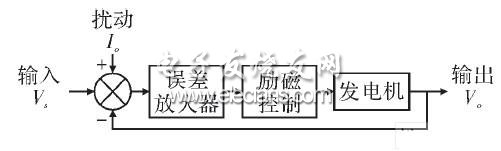
圖3 機組自動控制原理框圖
圖中,輸入:系統輸入是控制面板上的(輸出調整)電位器產生的設置電壓Vs。輸出:系統輸出是機組發電機輸出電壓Vo。擾動:系統擾動包括機組發電機輸出電流變化、機組發動機轉速變化、溫度變化和其他引起機組發電機輸出電壓變化的因素。其中機組發電機輸出電流,Io變化是主要外部擾動信號。
2 改進電路設計
改進電路設計采用A/D變換器對設置電壓Vs、輸出電壓Vo和發電機負載I/O進行數字量化;采用MCU進行數據處理;E2PROM完成參數保存。改進的發電機組控制保護電路組成框圖,如圖4所示。
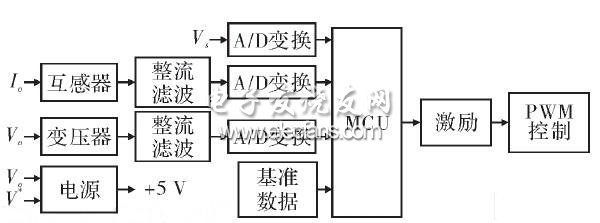
圖4 控制電路組成框圖
由于發電機組為50 Hz交流輸出,為增加控制處理次數,必須采用全波整流方式。同時,為兼顧噪聲濾除和信號滯后,應采用較小的整流濾波電容。
3 程序設計
控制保護程序由A/D變換控制程序模塊、E2PROM讀/寫控制程序模塊、輸出保護程序模塊和PWM輸出控制程序模塊等組成。采用計算機程序控制后仍然是一個基于PWM控制模式的擾動補償一階復合閉環自動控制系統。
(1)A/D變換控制程序模塊。
本設計采用了串行輸出A/D變換器。由MCU內部定時器提供定時中斷,調用A/D變換控制程序模塊完成Vs、Vo和Io的數字量化。
(2)E2PROM讀/寫控制程序模塊和輸出保護程序模塊。
E2PROM讀/寫控制程序模塊讀出預置的數據,與A/D量化數據進行比較,比較結果滿足保護條件時調用輸出保護程序模塊以完成輸出保護控制。
(3)PWM輸出控制程序模塊。
PWM輸出控制程序模塊完成PWM時間調整控制,控制關系為:T=K1Vs+K2Io+K3△V。式中,T為勵磁繞組導通時間;Vs為設置電壓;Io為輸出電流值;△V為輸出電壓Vo變化值;K1,K2,K3為增益控制系數。
Vs的A/D量化數據經平滑濾波后與K1相乘得到基本輸出時間。
為提高對輸出電流Io變化的控制響應,Io的A/D量化數據經平滑濾波后與K2相乘后作為附加調整時間直接加入到基本時間上,若△V處理可以滿足要求時,可取消Io處理。
△V的處理是保證控制響應性能的關鍵環節。△V是本次Vo采樣數據與前次Vo采樣數據的代數差。△V數據經平滑濾波后與K3相乘后作為附加調整時間與基本時間進行代數運算得到最終PWM控制時間。
系統動態特性主要取決于增益控制系數K1,K2,K3。增益控制系數較小時系統響應速度較慢,加大增益控制系數時系統響應速度明顯提高。
系統控制精度取決于A/D變換器動態范圍。A/D變換器動態范圍增大,系統控制精度提高,同時系統動態特性也將有所改善。由于本設計中采用8位MCU器件,A/D變換器動態范圍增大后程序計算復雜度和程序運行時間也隨之增加,因此需綜合考慮確定A/D變換器動態范圍。
4 試驗結果
按照改進方案設計了電原理圖、印制電路板和控制程序,并進行了發電機組控制試驗。試驗結果和指標如表1所示。
表1 主要檢驗項目試驗結果列表
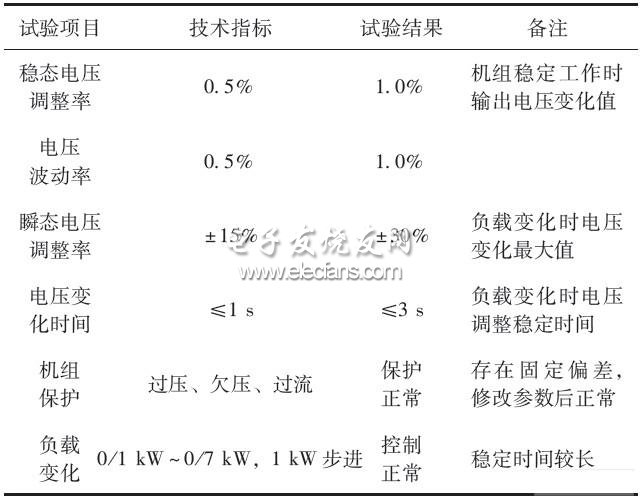
對穩態電壓調整率和電壓波動率進行測試時發現,調整PWM最小調整值僅引起調整時間變化而不能改善電壓調整率指標。分析確定為A/D變換器分辨力不夠。
對瞬態電壓調整率和電壓變化時間進行測試時發現,調整PWM最大調整值可明顯改善動態控制特性,但同時引起穩態特性變差。分析確定為除A/D變換器分辨力不夠外,系統控制關系中各項系數還應做組合優化。
5 結束語
本文所述的汽油發電機組控制與保護電路數字化改進設計方案取得階段性成果。新設計的控制板實現機組控制與保護功能,正在進一步優化設計以全面滿足技術指標要求。優化設計措施如下:
(1)增加A/D變換器動態范圍,改善穩態電壓調整率和電壓波動率指標。
(2)優化穩壓控制程序,提高電壓變化調整響應速度。
早期設計定型的中小功率發電機組的控制保護電路絕大部分采用模擬電路實現。
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
相關閱讀:
- [FPGA/ASIC技術] 基于FPGA嵌入式系統的雷達目標模擬器的設計 2011-08-05
- [模擬技術] 雷達回波模擬器中頻部分的實現 2011-08-05
- [DSP] 基于CPCI接口DSP板的雷達目標模擬器 2011-08-04
- [DSP] 基于DSP的便攜式雷達系統 2011-08-03
- [汽車電子] 一種雷達防追尾預警系統設計 2011-07-27
- [通信設計應用] 雷達電磁波三維探測范圍可視化仿真 2011-07-23
- [DSP] 基于FPGA和DSP的雷達模目信號設計 2011-07-05
- [電力技術] 專家系統在雷達故障檢測中的應用 2011-06-23
( 發表人:小蘭 )