 電子發燒友App
電子發燒友App


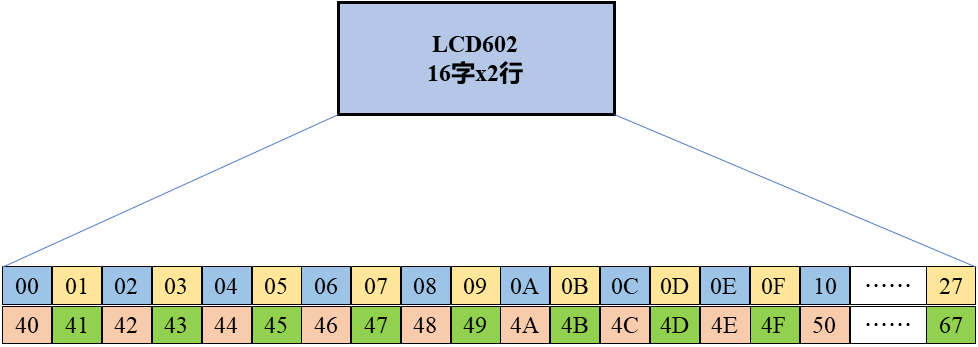
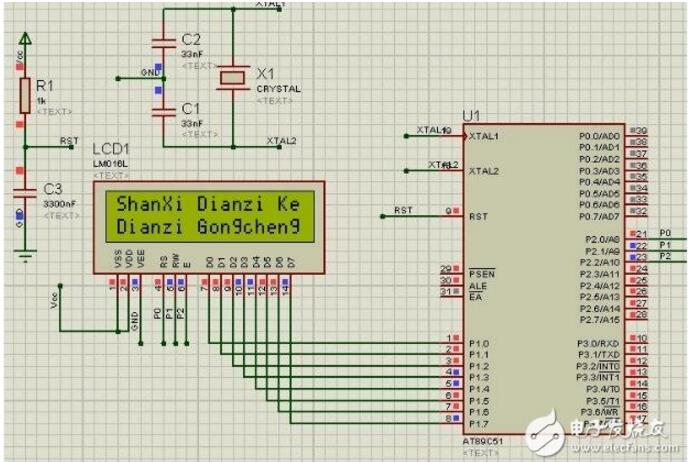
LCD1602液晶顯示頻率計-ME300B型 51/AVR單片機學習開發系統應用實例


使用說明:
頻率計:
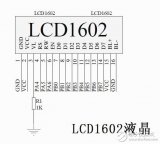
LCD1602顯示
在不增加外部計數硬件的情況下,本試驗軟件可測最高頻率達到460KHz
工作原理:
1S 鐘內對輸入脈沖所計數的次數則為頻率值。
16位二進制加法計數器的最大計數值為 65535。
設置定時器 0 工作在定時方式1,定時1S。
設置定時器 1 工作在計數方式1,對輸入脈沖進行計數,溢出產生中斷。
將定時器 1中斷定義為優先。在中斷處理程序里對中斷次數進行計數。1S到后,將中斷次數和計數器里的計數值取出進行綜合數據處理,處理后的數據送LCD1602顯示。
信號來源:
1、軟件里對 P1.4定時取反,形成輸出脈沖,接到 P3.5 可自測。
2、可用CD4040 芯片對 ALE 信號進行分頻。
ALE 頻率=11059200Hz ÷ 6 = 1843200 Hz
接 CD4040 芯片 Q2 以后的輸出段均可顯示真實的頻率值。
1843200 Hz ÷ 4 = 460800 Hz
顯示結果:
P1.4 → P3.5 顯示:
000010 (Hz)
CD4040-Q2 → P3.5 顯示:
460806 (Hz)
如果有條件的話,可使用專用設備(信號發生器和頻率計)進行校正。
;******************************************************************
;* *
;* ME300B單片機開發系統演示程序-1602LCD顯示數字頻率計 *
;* *
;* 郵箱: gguoqing@willar.com *
;* 網站: http://www.willar.com ; *
;* 作者: gguoqing *
;* 時間: 2006/06/03 *
;* *
;*【版權】COPYRIGHT(C)偉納電子 www.willar.com ALL RIGHTS RESERVED *
;*【聲明】此程序僅用于學習與參考,引用請注明版權和作者信息! *
;* *
;******************************************************************
;------------------------------------------------------------
;頻率計的程序
;包含:外部中斷設置,中斷服務程序,定時程序,定時服務程序
;以及數據處理,顯示,包括 三位十進制數轉化為四位BCD碼,
;
;------------------------------------------------------------
BEEP BIT P3.7
LCD_RS BIT P2.0
LCD_RW BIT P2.1
LCD_EN BIT P2.2
LCD_X EQU 3FH ;LCD 地址變量
TIMER_H EQU 30H ;定時器高位字節單元
TIMER_L EQU 31H ;定時器低位字節單元
TIMCOUNT EQU 32H ;時間中斷數
INT_G EQU 35H ;中斷計數緩沖單元高地址
INT_H EQU 34H ;中斷計數緩沖單元中地址
INT_L EQU 33H ;中斷計數緩沖單元低地址
T_S EQU 36H ;數據顯示低位
T_M EQU 37H ;數據顯示中位
T_H EQU 38H ;數據顯示高位
T_G EQU 39H ;數據顯示最高位
;----------------------------------------------------------
ORG 0000H
JMP MAIN ;主程序開始
ORG 000BH
JMP TIMER_INT ;定時器T0中斷服務程序
ORG 001BH ;定時器T1中斷服務程序
JMP TIMER1
ORG 0030H
;----------------------------------------------------------
MAIN:
MOV SP,#60H ;設置SP指針
LCALL PRO_SET ;初始化
CALL SET_LCD
LCALL TIM_T0
;-----------------------------------------------------------
;LCD1602是慢速顯示器件,故100MS顯示一次。
;-----------------------------------------------------------
MAIN1:
MOV R5,40
MAIN2:
ACALL DELAY1 ;3ms
DJNZ R5,MAIN2
ACALL SBIN_SBCD
CALL CONV
JMP MAIN1
;------------------------------------------------------------
;T1計數器中斷服務子程序
;計T1計數器溢出次數
;------------------------------------------------------------
TIMER1:
INC 2AH
RETI
;------------------------------------------------------------
;初始化程序
;------------------------------------------------------------
PRO_SET: MOV A,#00H
MOV B,#00H
MOV 2AH,A
MOV P0,#0FFH
MOV P1,#0FFH
MOV P2,#0FFH
MOV INT_H,#00H
MOV INT_L,#00H
MOV INT_G,#00H
MOV T_S,#00H
MOV T_H,#00H
MOV T_M,#00H
MOV T_G,#00H
MOV TIMCOUNT,#00H
MOV TIMER_H,#04CH ;定時 50 MS
MOV TIMER_L,#10H ;
CLR BEEP
SETB P3.5 ;P3.5端口置輸入狀態
RET ;T1(TIMER1的外部輸入腳)
;-----------------------------------------------------
;LCD 初始化設置
;-----------------------------------------------------
SET_LCD:
CLR LCD_EN
CALL INIT_LCD ;初始化 LCD
CALL DELAY1
MOV DPTR,#INFO1 ;指針指到顯示信息1
MOV A,#1 ;顯示在第一行
CALL LCD_SHOW
MOV DPTR,#INFO2 ;指針指到顯示信息2
MOV A,#2 ;顯示在第二行
CALL LCD_SHOW
RET
;-----------------------------------------------------
INFO1: DB " CYMOMETER ",0 ;LCD 第一行顯示信息
INFO2: DB "FREQ: HZ ",0 ;LCD 第二行顯示信息
;-----------------------------------------------------
;LCD 接口初始化
;8位I/O控制
;-----------------------------------------------------
INIT_LCD:
MOV A,#38H ;雙列顯示,字形5*7點陣
CALL WCOM
CALL DELAY1
MOV A,#38H ;雙列顯示,字形5*7點陣
CALL WCOM
CALL DELAY1
MOV A,#38H ;雙列顯示,字形5*7點陣
CALL WCOM
CALL DELAY1
MOV A,#0CH ;開顯示,關光標,
CALL WCOM
CALL DELAY1
MOV A,#01H ;清除 LCD 顯示屏
CALL WCOM
CALL DELAY1
RET
;----------------------------------------------------
LCD_SHOW: ;在LCD的第一行或第二行顯示信息字符
CJNE A,#1,LINE2 ;判斷是否為第一行
LINE1: MOV A,#80H ;設置 LCD 的第一行地址
CALL WCOM ;寫入命令
CALL CLR_LINE ;清除該行字符數據
MOV A,#80H ;設置 LCD 的第一行地址
CALL WCOM ;寫入命令
JMP FILL
LINE2: MOV A,#0C0H ;設置 LCD 的第二行地址
CALL WCOM ;寫入命令
CALL CLR_LINE ;清除該行字符數據
MOV A,#0C0H ;設置 LCD 的第二行地址
CALL WCOM
FILL: CLR A ;填入字符
MOVC A,@A+DPTR ;由消息區取出字符
CJNE A,#0,LC1 ;判斷是否為結束碼
RET
LC1: CALL WDATA ;寫入數據
INC DPTR ;指針加1
JMP FILL ;繼續填入字符
RET
;---------------------------------------------------
CLR_LINE: ;清除該行 LCD 的字符
MOV R0,#24
CL1: MOV A,#' '
CALL WDATA
DJNZ R0,CL1
RET
;-----------------------------------------------------
; 寫指令、數據使能子程序
;-----------------------------------------------------
ENABLE: ;寫指令使能
CLR LCD_RS ;RS=L,LCD_RW=L,D0-D7=指令碼,E=高脈沖
CLR LCD_RW
SETB LCD_EN
CALL DELAY0
CLR LCD_EN
RET
ENABLE1: ;寫數據使能
SETB LCD_RS ;RS=H,RW=L,D0-D7=數據,E=高脈沖
CLR LCD_RW
SETB LCD_EN
CALL DELAY0
CLR LCD_EN
RET
DELAY0: MOV R7,#250 ;延時500微秒
DJNZ R7,$
RET
;----------------------------------------------------
;寫入命令子程序
;----------------------------------------------------
WCOM: ;以8位控制方式將命令寫至LCD
MOV P0,A ;寫入命令
CALL ENABLE
RET
;----------------------------------------------------
;寫入數據子程序
;----------------------------------------------------
WDATA: ;以8位控制方式將數據寫至LCD
MOV P0,A ;寫入數據
CALL ENABLE1
RET
;---------------------------------------------------
;在 LCD 第二行顯示字符
;A=ASC DATA, B=LINE X POS
;---------------------------------------------------
LCDP2: ;在LCD的第二行顯示字符
PUSH ACC ;
MOV A,B ;設置顯示地址
ADD A,#0C0H ;設置LCD的第二行地址
CALL WCOM ;寫入命令
POP ACC ;由堆棧取出A
CALL WDATA ;寫入數據
RET
;-------------------------------------------------------
;ASCII 轉換并在第二行顯示數字子程序
;-------------------------------------------------------
CONV: ; MOV A,T_G
MOV LCD_X,#6 ;設置位置
; CALL SHOW_DIG2
MOV A,T_H
;INC LCD_X ;加載小時數據
CALL SHOW_DIG2 ;顯示數據
MOV A,T_M ;加載分鐘數據
INC LCD_X ;設置位置
CALL SHOW_DIG2 ;顯示數據
MOV A,T_S ;加載秒數數據
INC LCD_X ;設置位置
CALL SHOW_DIG2 ;顯示數據
RET
;----------------------------------------------------
SHOW_DIG2:
MOV B,#16
DIV AB
ADD A,#30H
PUSH B
MOV B,LCD_X
CALL LCDP2
POP B
MOV A,B
ADD A,#30H
INC LCD_X
MOV B,LCD_X
CALL LCDP2
RET
;-----------------------------------------------------
DELAY1: ;延時3MS
MOV R6,#15
D2: MOV R7,#100
DJNZ R7,$
DJNZ R6,D2
RET
; ----------------- 定時器設置 ------------------------
;設置定時器0工作在定時方式1,定時器1工作在計數方式1
;---------------------------------------------------------
TIM_T0: MOV TMOD,#0D1H
MOV TH0,TIMER_H ;設置定時初值高位
MOV TL0,TIMER_L ;設置定時初值低位
MOV TH1,#00H ;清T1計數器
MOV TL1,#00H
MOV IE,#8AH ;開中斷總允許,允許T0溢出中斷
SETB PT1
SETB TR1
SETB TR0 ;定時器開始工作
RET
;--------------------------------------------------------
;定時器0中斷服務程序
;--------------------------------------------------------
TIMER_INT:
CLR TR0 ;關閉定時器
MOV TL0,TIMER_L ;重新賦初值
MOV TH0,TIMER_H ;
INC TIMCOUNT ;定時1S,時間單位
MOV A,TIMCOUNT ;查看數量值
CPL P1.4 ;產生自測信號
CJNE A,#20,T_END ;如果沒有到1S返回
CLR TR1 ;關閉計數器T1
MOV TIMCOUNT,#00H ;到1S則清零
MOV INT_L,TL1 ;取出計數值低位
MOV INT_H,TH1 ;取出計數值高位
MOV INT_G,2AH ;取出溢出計數值位
MOV TH1,#00H
MOV TL1,#00H
MOV 2AH,#00H
SETB TR1
T_END: SETB TR0 ;重新開始定時操作
RETI
;---------------------------------------------------------------
;三字節二進制整數轉換成四字節BCD碼子程序
;二進制數從低位到高位分別存放在INT_L、INT_H、INT_G單元中
;BCD碼從低位到高位分別存放在T_S、T_M、T_H、T_G 單元中
;---------------------------------------------------------------
SBIN_SBCD:
PUSH PSW
SETB PSW.3 ;設置當前寄存器
CLR PSW.4
CLR A ;清累加器
MOV T_G,A
MOV T_H,A ;清除出口單元,準備轉換
MOV T_M,A
MOV T_S,A
MOV R5,INT_G
MOV R7,INT_L ;設置二進制數起始地址
MOV R6,INT_H
MOV R2,#24
CLR C
HH1:
MOV A,R7
RLC A
MOV R7,A
MOV A,R6
RLC A
MOV R6,A
MOV A,R5
RLC A
MOV R5,A
MOV A,T_S ;得到低位數據
ADDC A,T_S ;累加
DA A ;十進制調整
MOV T_S,A ;保存數據
MOV A,T_M ;得到第二位數據
ADDC A,T_M ;累加
DA A ;十進制調整
MOV T_M,A ;保存結果
MOV A,T_H ;得到第三位
ADDC A,T_H ;累加
DA A
MOV T_H,A ;保存
MOV A,T_G ;得到第四位
ADDC A,T_G ;累加
;DA A
MOV T_G,A
DJNZ R2,HH1 ;
POP PSW
RET
;----------------------------------------------------------------
END ;告訴編譯器本程序到此結束。
;-----------------------------------------------------------------









 工商網監
工商網監
評論