 電子發燒友App
電子發燒友App


這個創意是個舶來品。記得有個國外作者做了一個基于Arduino和wifi路由器的智能機器人。
要求有攝像頭,能夠拍攝小車經過地方的影像。
要求使用Arduino模塊實現控制。
要求使用PC通過路由器控制小車。
實現這樣的機器人很難嗎?能不能做一個簡化版的?
組件列表
A4WD小車;ROMEO控制板;5節2300MAH電池;12V電池包;充電器;上海貝爾 RG-100A路由器;中星微301攝像頭 ;兩自由度DF15MG云臺。

圖1 基于Arduino開源平臺的WiFi視頻監控小車
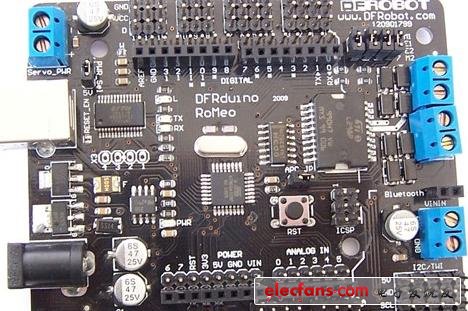
圖2 Arduino_romeo主控板
圖3 小車

圖4 云臺和攝像頭

圖5 攝像頭
源代碼
下面放出ROMEO板的源程序將這個程序使用Arduino 0022 下載進去:
#include
#define EN1 5//控制左側電機速度
#define EN2 6//控制右側電機速度
#define IN1 4//控制左側電機方向
#define IN2 7//控制右側電機方向
#define FORW 0//前進
#define BACK 1//后退
#define dataLenMax 16 //設置最大數據幀長度 不大于16
Servo servoX; //云臺X軸舵機 左右
Servo servoY; //云臺Y軸舵機 上下
//控制電機轉動子函數
void Motor_Control(int M1_DIR,int M1_EN,int M2_DIR,int M2_EN)
{
//////////M1////////////////////////
if(M1_DIR==FORW)//M1電機的方向
digitalWrite(IN1,LOW); //置高,設置方向向前
else
digitalWrite(IN1,HIGH);//置低,設置方向向后
if(M1_EN==0)//M1電機的速度
analogWrite(EN1,LOW);//置低,停止
else
analogWrite(EN1,M1_EN);//否則,就設置相應的數值
///////////M2//////////////////////
if(M2_DIR==FORW)//M2電機的方向
digitalWrite(IN2,LOW);//置高,方向向前
else
digitalWrite(IN2,HIGH);//置低,方向向后
if(M2_EN==0)//M2電機的速度
analogWrite(EN2,LOW);//置低,停止
else
analogWrite(EN2,M2_EN);//否則,就設置相應的數值
}
void setup()
{
int i;
for(i=4;i<=7;i++)//設置控制電機的各端口為輸出模式
pinMode(i, OUTPUT);
Serial.begin(19200);//設置波特率為19200bps
servoX.attach(10);
servoY.attach(11);
}
///////////////////UART通訊命令字宏定義///////////////////////////////////////////
#define UART_START0 0X55 //通訊數據幀頭
#define UART_START1 0XAA //通訊數據幀頭
#define UART_END 0X0A //返回數據包結束標志
////////////////////////// 命令字定義/////////////////////////////////////////////////////
// 波特率 57600BPS,無奇偶效驗,一位停止位。文中的數字都是8位的十六進制數 /////
///////////////////////////////////2路舵機控制/////////////////////////////////////////////
//本指令可同時控制6路舵機,每路可單獨控制位置和速度。
//字頭 楨長度 命令字 S1位置 S1速度 S2位置 S2速度 校驗和
//55 aa 4 01
//"S1位置,s2位置"為2個舵機的角度值,范圍為0~180,90為中位。
//"S1速度,s2速度"為運動的速度值,spd越高,運動速度越快,范圍為0~0xff。
//返回值:
//字頭 楨長度 命令字 應答標志 校驗和
//55 aa 01 01 S SUM
//返回操作標志。設置成功S返回0X01,失敗無返回。
//////////////////////////////////////////////////////////////////////////////////////////////
#define RC_MOTO_SET 0X01 // 2路舵機控制
////////////////////////////////2路電機調速控制////////////////////////////////////////////////
//本指令可同時控制2路直流電機速度。(機器人頭超前方,人面對機器人后方)
//字頭 楨長度 命令字 左電機 右電機 校驗和
//55 aa 2 02 S1 S2 SUM
//S1,S2分別代表2個電機的PWM輸出占空比。0x80代表電機停止,0x00代表正轉最大速度(100%占空比,機器人向前),0xff代表反轉最大速度(100%占空比機器人向后)。
//返回值:
//字頭 楨長度 命令字 應答標志 校驗和
//55 aa 01 02 S SUM
//返回操作標志。設置成功S返回0X01,失敗無返回。
///////////////////////////////////////////////////////////////////////////////////////////////////////////////
#define MOTO_SET 0X02 //2路電機調速控制
void loop()
{
//定義變量
int dataLen = 0; //數據長度
int start_flag = 0; //數據幀起始標志
int data_index = 0; //數據幀索引
int com_index = 0; //命令索引
int temp_char1 = 0; //接收暫存器1
int temp_char0 = 0; //接收暫存器1
int i,x,y; //變量
int state = 0; //接收數據幀狀態 1代表有數據幀,0代表沒有接收到數據幀
int SUM; //校驗和
int RxData[32]; //數據存儲寄存器
int Serial_flag;
int Moto1S,Moto2S; //電機1.2 速度控制暫存
int Moto1D,Moto2D; //電機1.2 方向控制暫存
while(1)
{
temp_char1 = Serial.read(); //讀取串口數據
if(temp_char1!=-1) //有數據接收到
{
Serial_flag=1;
if(start_flag == 0) // 判斷 是否有 0X55 0XAA 數據幀頭
{
if( temp_char1 == UART_START1)
{
if(temp_char0 == UART_START0)
{
start_flag = 1;
RxData[0]=UART_START0;
RxData[1]=UART_START1;
data_index = 0;
com_index = 0;
}
}
else temp_char0 = temp_char1;
}
else if( com_index < 2)
{
switch(com_index)
{
case 0 : RxData[2] = temp_char1; //數據長度
dataLen = temp_char1;
break;
case 1 : RxData[3] = temp_char1; //命令字
break;
}
com_index++;
}
else if((data_index < dataLen) && (dataLen < dataLenMax)) //接收數據,同時數據不大于最大數據長度
{
RxData[data_index+4] = temp_char1;
data_index ++;
}
else
{
RxData[data_index+4] = temp_char1;
state = 1;
start_flag = 0;
}
}
if(state == 1) //如果有數據幀接收到
{
SUM = 0;
for(i=0; i
SUM%=256;
if(SUM == RxData[dataLen+4]) //如果校驗和正確 解析命令
{
if(RxData[3] == RC_MOTO_SET) //舵機云臺控制命令
{
if(RxData[4]>=150) x=150;
else if(RxData [4]<=30) x=30;
else x = RxData[4];
if(RxData[6]>=150) y=150;
else if(RxData[6]<=30) y=30;
else y = RxData[6];
servoX.write(x);
servoY.write(y);
state = 0;
}
else if(RxData[3] == MOTO_SET) //電機控制命令
{
///////////////////電機1控制量變換/////////////////////////////
if(RxData[4] == 0X80) Moto1S = 0;
else if(RxData[4] < 0X80) //小于0X80的控制數據 代表正轉
{
Moto1D = FORW; //正轉
Moto1S = 0xff - RxData[4]*2; //將0X00最大速度 到0X7F 最小速度,轉換為0最小到255最大速度的值
}
else //大于0X80的控制數據 代表反轉
{
Moto1D = BACK; //反轉
Moto1S = (RxData[4] - 0X80)*2; //將0XFF最大速度 到0X81 最小速度,轉換為0最小到254最大速度的值
}
///////////////////電機2控制量變換/////////////////////////////
if(RxData[5] == 0X80) Moto2S = 0;
else if(RxData[5] < 0X80) //小于0X80的控制數據 代表正轉
{
Moto2D = FORW; //正轉
Moto2S = 0xff - RxData[5]*2; //將0X00最大速度 到0X7F 最小速度,轉換為0最小到255最大速度的值
}
else //大于0X80的控制數據 代表反轉
{
Moto2D = BACK; //反轉
Moto2S = (RxData[5] - 0X80)*2; //將0XFF最大速度 到0X81 最小速度,轉換為0最小到254最大速度的值
}
Motor_Control(Moto1D,Moto1S,Moto2D,Moto2S);//電機速度及其方向控制
state = 0;
}
}
}
}
}
程序使用了一種幀結構 每個數據命令都是 55 AA開頭,最后一個字節有一個簡單的校驗和。這樣是為了防止路由器發出錯誤數據干擾小車。因為據我觀察,路由器在啟動的時候會發出一大堆字符。如果協議太簡單小車可能會讀取到錯誤數據亂動作。
程序做了小車速度控制,及其兩個云臺舵機控制在里面。云臺X軸舵機接數字10口,Y軸舵機接11口。其他功能可以在上面增加。此時下載好程序后可以通過 JoystickInterface 這個軟件用USB線連接測試一下小車是否能夠可靠運行。
如果USB線能控制,將路由器的串口線接在ROMEO的串口,對應關系為 路由器G接ROMEO板GND,T接RX,R接TX。注意接線最好都斷電操作。
修改控制按鍵鍵值,下面是一些控制代碼,將鍵抬起設置為停止這樣就可以在無按鍵的時候小車自動停止。
停止 55AA0202808003
100% 速度前進 55AA0202000003
100% 速度后退 55AA0202FFFF01
100% 速度左轉 55AA0202FF0002
100% 速度右轉 55AA020200FF02
直至Wifi監控小車就算基本功能實現完畢。后面還有很多功能可以試試,比如通過以太網遠程遙控。加一些傳感器,車燈什么的。可以發揮的空間很大。
相關問題
Q:什么是Wifi Robot無線遠程智能遙控小車?
A:Wifi Robot無線遠程智能遙控小車就是利用非常成熟的WIFI無線網絡為數據載體,實現控制數據,音視頻雙向數據交換而達到控制小車和視頻監控等等功能。
Q:Wifi Robot無線遠程智能遙控小車有什么功能?
A:Wifi Robot無線遠程智能遙控小車是集無線通訊、實時四驅、多向機械云臺、視頻監控、電器紅外遙控、環境溫度檢測、為一體的多功能智能遙控車。
Q:Wifi Robot無線遠程智能遙控小車用在什么地方?
A:Wifi Robot無線遠程智能遙控小車可以放在公司作為產品演示的高級智能助手,幫你遞送文件,幫你拿聽百威,幫你拿盒萬寶路,又或者向你的客戶打聲招呼。
Wifi Robot無線遠程智能遙控小車可以放在家里當做一貼切保姆,你可以在公司用電腦監控家里的的一切動態,可以在車上就設定好家里空調溫度,可以定時電視機在什么時候換什么臺,這一切你只需要連接到ITELNET。
Wifi Robot無線遠程智能遙控小車也是廣場上的明星,你帶著他在城市廣場上炫耀,玩耍,讓它拿個小禮物送心儀的MM,讓他幫你丟垃圾,這一切都不是問題。










 工商網監
工商網監
評論