 電子發燒友App
電子發燒友App


ZigBee是一個由多到65 000個無線數傳模塊組成的無線數傳網絡平臺,十分類似現有的移動通信CDMA網或GSM網,每一個ZigBee網絡數傳模塊類似移動網絡的一個基站,在整個網絡范圍內,它們之間可以進行相互通信
不同的是,ZigBee網絡主要為自動化控制數據傳輸而建立,每個ZigBee網絡節點既可以與監控對象直接進行數據采集和監控,還可以自動中轉其他網絡節點傳輸的數據資料
除此之外,每個ZigBee網絡節點還可在自己信號覆蓋的范圍內,與多個不承擔網絡信息中轉任務的孤立子節點無線連接
ZigBee網絡節點可支持31個傳感器和受控設備,每個傳感器與受控設備有8種不同的接口方式,用來采集、傳輸數字量和模擬量
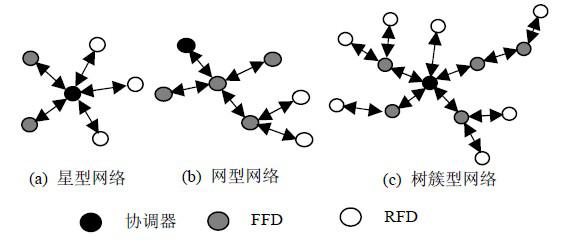
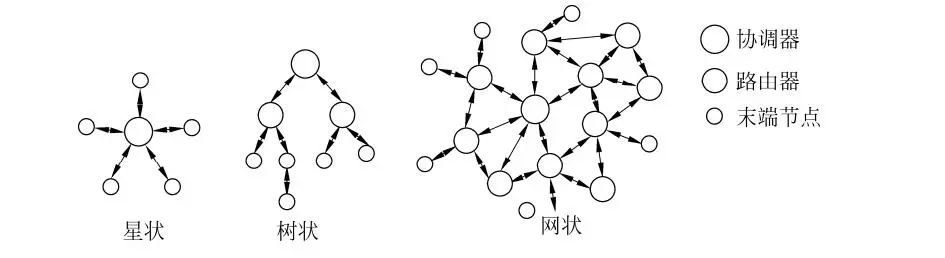
ZigBee WSN中的節點大體可以分為兩種類型:有路由容量的節點和沒有路由容量的節點
對于樹簇拓撲的WSN來說,終端設備通常是RFD精簡設備,因此沒有路由容量;而路由器與協調器是由FFD全功能設備組成的,因此有路由容量
樹簇型拓撲的WSN中,通常采用樹簇算法與AODVjr算法相結合的路由算法,其中樹簇算法指的是消息沿著樹型拓撲進行傳輸的算法,它是靜態的,不需要存儲路由表
該算法適用于節點靜止或者移動較少的場合
而AODVjr算法則是對Ad Hoc按需距離矢量路由算法的改進,考慮到節能、應用方便性留了等因素,對AODV的一些特點進行了簡化,但是仍然保留了AODV的原始功能
這兩種算法的結合使用確定了WSN路由的三種模式,即:禁止路由模式、使能路由模式和強制路由模式
禁止路由模式就是禁止對路徑進行查找,因此處于該模式的網絡只能使用樹簇算法沿著樹型拓撲進行路由
使能路由模式是將樹簇算法與AODVjr算法相結合,視具體情況來決定到底采用哪種路由算法
強制路由模式完全使用了AODVjr算法,只要設備具有路徑查找能力,不管消息傳輸的路徑是否已經存在,都要啟動一個路徑查找過程,當查找完成,數據包將沿著計算出來的路徑傳送
2 路由方式
路由的設定通常有三種模式:禁止路由發現、使能路由發現及強制路由發現
禁止路由發現(SUPPRESS):如果發現網絡路由器存在,數據包路由指向該路由器
否則,數據包沿著樹形推進
使能路由發現(ENABLE):如果發現網絡路由器存在,數據包路由指向該路由器
如果網絡路由器不能確定,路由器可以啟動一個路由發現過程,當發現完成,數據包將沿著計算出來的路由傳送
如果該路由器沒有路由發現能力,數據包將沿著樹形推進
強制路由發現(FORCE):如果路由器有路由發現能力,不管路由是否已經存在,都將啟動一個路由發現過程
發現完成,數據包將沿著計算出來的路由傳送
如果這個路由器沒有路由發現能力,數據包將沿著樹形推進
這個選擇必須小心使用,因為它會產生較大的網絡冗余
它的主要用途是修復破壞了的路由
對于樹形拓撲結構設備間的數據轉發,通常將源地址簡化為上行路由(route up)或下行路由(route down)
如果LocalAddr < DestAddr < LocalAddr + CSkip(d-1) 為下行路由,否則為上行路由
通常網絡的協調器或路由器都含有一個鄰接設備表,該表記錄了一定區域內與其具有鄰接關系的設備
若想使用鄰接表進行路由,只要目標設備在物理區域內可見,即可直接發送信息
而對于網狀拓撲結構,則要使用路由表來進行路由
通常協調器或路由器都擁有自己的路由表,如果目標設備在路由表中有相關的記錄,則信息就可以根據路由表中的記錄進行發送,否則就要沿著樹形拓撲來傳輸數據
3 路由過程
路由過程主要為以下幾個步驟:
(1)一個設備發出路由請求命令幀啟動路由發現過程;
(2)對應的接收設備收到該命令后,回復應答命令幀;
(3)對潛在的各條路徑花費(跳轉次數、延遲時間)進行評估比較;
(4)最佳路由記錄添加到此路徑上各個設備的路由表
中
4 最短最優路徑的判定方式
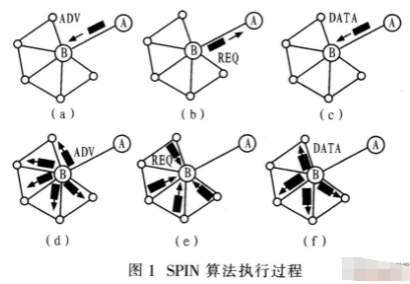
通常路徑請求與路徑應答都是由路由器或協調器創建的,當路由器廣播發送路徑請求時,通常不會只發一次,而是間隔一段時間重復進行發送,而且對于廣播尋址來說,它擁有兩大特點:一個是凡有無線RF收發使能的設備皆能接收到該幀;另外就是廣播發送采用一種被動應答模式,即當某一設備廣播發送消息時,它還要監聽所有的鄰居設備是否對該幀進行廣播轉發,若沒有則設備還要再次廣播發送該幀
這樣就會出現網絡中的設備可能多次收到同一個路徑請求,目的設備也有可能在一段時間內多次收到同一個路徑請求
目的設備究竟應該響應哪個路徑請求呢?在路徑算法的實現中筆者采用首接為最優的思想,即第一個收到的有效路徑請求即為目的設備要響應的請求,在該請求中記錄的路徑即為消息傳輸的路徑,應答命令將沿著收到的第一個路徑請求命令幀中記錄的上一級地址發送回去
5 實驗
本實驗基于Microchip公司推出的TSZ-008系列開發套件,對ZigBee無線傳感器網絡路由的建立與確認等操作進行了實驗測試
5.1 ZigBee 無線傳感器節點硬件
要創建WSN節點,本實驗使用了以下的組件:一片帶SPITM接口的PIC18F單片機;一個帶有所需外部元件的RF收發器芯片CC2420; 一根天線,可以是PCB上的引線形成的天線或單極天線
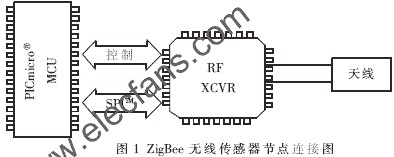
如圖1所示,控制器通過SPI總線與RF收發器芯片CC2420相連
控制器充當SPI主器件而CC2420充當從器件
控制器實現了IEEE 802.15.4 MAC 層和ZigBee協議層
它還包含了特定的應用邏輯,并使SPI總線與RF收發器交互
Microchip協議棧提供了完全集成的驅動程序,免除了主應用程序管理RF收發器功能的任務
如果需要,可以將某些非SPI控制信號重新分配到其他端口引腳以適合應用的硬件
在這種情況下,必須修改物理層接口定義,包括正確的引腳分配
5.2 設計步驟
以微芯的ZigBee協議棧為例,為了設計ZigBee協議系統,應按以下步驟進行設計:(1)獲得OUI;(2)根據數據傳輸率及市場的需要,確定無線通信的頻帶;(3)使用TSZ-008開發系統進行開發設計;(4)利用微芯協議棧提供的源文件擴展ZigBee協議應用;(5)進行RF規范論證;(6)進行ZigBee協議互操作規范論證
具體設計時應遵從以下步驟:
(1)確定系統需要使用的配置文件;
(2)確定每個設備具備的終端結構;
(3)創建一個新的項目目錄,將所有的具體應用源文件及項目文件置于該目錄中;
(4)使用ZENA軟件產生基于設備類型、設備配置及終端結構的配置文件并編寫相關源代碼
5.3 虛擬路徑建立過程
相關源碼如下:
case NLME_START_ROUTER_confirm:
if (!params.NLME_START_ROUTER_confirm.Status)
{
ConsolePutROMString( (ROM char *)"Router Started!
Enabling joins...rn" );
params.NLME_PERMIT_JOINING_request.PermitDura-
tion=0xFF;
currentPrimitive=NLME_PERMIT_JOINING_request;
}
else
{
PrintChar( params.NLME_JOIN_confirm.Status );
ConsolePutROMString( (ROM char *)" Router start
unsuccessful. We cannot route frames.rn" );
currentPrimitive = NO_PRIMITIVE;
}
break;
5.4 確認路徑過程
相關源碼如下:
case NLME_PERMIT_JOINING_confirm:
if (!params.NLME_PERMIT_JOINING_confirm.Status)
{
ConsolePutROMString( (ROM char *)"Joining permitted.rn" );
currentPrimitive = NO_PRIMITIVE;
}
else
{
PrintChar( params.NLME_PERMIT_JOINING_confirm.Status );
ConsolePutROMString( (ROM char *)" Join permission unsuccessful. We cannot allow joins.rn" );
currentPrimitive = NO_PRIMITIVE;
}
break;
5.5 實驗結果
筆者主要對樹簇網進行了驗證
實驗中,路由器與終端設備組建了小型星形網絡,這個星形網絡是以路由器為中心,以終端設備為子節點的
與標準星形網絡不同的是,在以路由器為中心的小型星形網絡中,路由器不會向終端設備發出任何控制命令,它只起中繼的作用,實際的控制命令是由協調器發出的
這樣通過路由器的連接中繼作用,協調器可以控制超出它的能量覆蓋范圍的終端設備
路由器沒有組建樹簇網絡的功能,但它可以接收終端設備形成星形網絡,也可以加入協調器參與到樹簇網絡中
可以使用開發板進行路由器的定位實現簡單路由,也可以實現幀轉發,但是路由表的建立維護功能不全
協調器和路由器不能自動地發起路由探詢與路由修復,所以在應用層傳輸數據包之前,需要通過按下某一固定鍵盤的方式人工激發路由探詢
在路由探詢等待中,在接收緩存中只允許存放一個等待傳送的數據包
未來對ZigBee無線傳感器網絡的路由研究需要做很多工作,包括數據包路由的安全性保障、更優越路由算法的研究以及如何在降低功耗的情況下使網絡得到最大限度的擴展,且不影響路由的建立與自動修復等等
無庸置疑,基于ZigBee協議的無線傳感器網絡會將擁有更大的發展空間與前景











 工商網監
工商網監
評論