 電子發(fā)燒友App
電子發(fā)燒友App


機載光電穩(wěn)瞄穩(wěn)定控制算法除了經典控制還有各種先進的控制算法,如:最優(yōu)控制、變結構控制、神經網絡及模糊控制等。從目前的文獻資料來看,這些先進的算法大都限于仿真研究,實際用于產品的報道很少。目前,機載光電穩(wěn)瞄產品以經典控制模擬電路實現為主。?
機載光電穩(wěn)瞄產品大量裝備于各種類型飛機上,其核心是陀螺穩(wěn)定平臺,主要作用在于隔離載體的角擾動,使安裝在載體上的光學傳感器的視軸在慣性空間內保持穩(wěn)定,使光學傳感器得到清晰的圖像。穩(wěn)定控制最直觀的方法是將光學傳感器系統(tǒng)安裝在減震裝置上,減振器可以隔離載體的高頻低振幅振動,但是減振后的低頻振動仍然會對視軸產生擾動。因此,這種被動隔離的方法常與主動隔離的方法混合使用。主動隔離的方法有:整體穩(wěn)定、齒輪傳動穩(wěn)定、光學穩(wěn)定、電子學穩(wěn)定和動量輪穩(wěn)定[1]。
模擬控制的實現依賴于集成電路和分離元件,設備間的信號傳遞均采用模擬量,導致控制器元件眾多、結構復雜、體積龐大,同時在模擬電路的硬件基礎上,要想實現各種復雜的現代控制方法幾乎是不可能的。數字控制系統(tǒng)以程序代替硬件,有利于減小電路的體積,降低成本,在信號處理、算法實現上具有模擬控制無可替代的優(yōu)勢。數字控制是整個伺服控制領域的發(fā)展趨勢。隨著科學技術的發(fā)展,對機載光電穩(wěn)瞄的穩(wěn)定精度、動態(tài)品質的要求越來越高。因此,必須采用先進的數字控制技術,運用現代控制算法,設計出高性能的陀螺穩(wěn)定平臺控制系統(tǒng),以滿足實際系統(tǒng)的要求。
2、機載光電穩(wěn)瞄系統(tǒng)工作原理
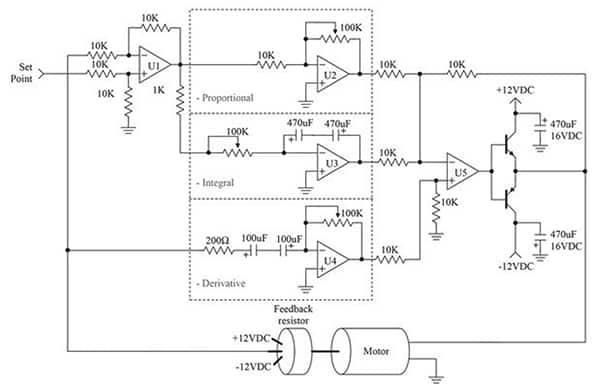
系統(tǒng)的控制環(huán)路如圖1所示,系統(tǒng)包含三個環(huán)路,內部為電流環(huán),電流環(huán)控制流過電樞的電流盡可能嚴格跟隨電流指令,改善電流跟隨電壓的動態(tài)特性,包括超調和調節(jié)時間等,抑制電子噪聲和反電勢等的影響。中間為速度環(huán),即穩(wěn)定環(huán)。穩(wěn)定環(huán)是光電穩(wěn)瞄系統(tǒng)的關鍵,光電探測器的機(船、車)載應用直接受伺服系統(tǒng)穩(wěn)定環(huán)性能的影響[2]。穩(wěn)定環(huán)采用速率陀螺作為慣性敏感元件,檢測光電穩(wěn)定平臺方位和俯仰軸角速度,與速度命令信號形成誤差電壓,該誤差電壓通過穩(wěn)定控制器在直流電機軸上產生穩(wěn)定力矩,從而實現光電穩(wěn)定平臺抑制擾動、保持在慣性空間相對穩(wěn)定。外部為位置環(huán),通過比較輸入信號與反饋信號產生控制偏差,借助位置控制器校正補償輸出到穩(wěn)定環(huán)對光電穩(wěn)瞄實施控制。在目前的穩(wěn)瞄產品中,三個環(huán)路的控制器除了位置環(huán)控制器為數字控制器,穩(wěn)定環(huán)控制器和電流環(huán)控制器均為模擬控制器。本文研究的目的是將穩(wěn)定環(huán)用數字控制方式實現。
圖1 光電穩(wěn)定平臺控制系統(tǒng)環(huán)路
3、控制系統(tǒng)建模與設計
建立數學模型
從前面的分析可知,穩(wěn)定環(huán)路控制的對象為包括穩(wěn)瞄轉塔的電流閉環(huán),對電流閉環(huán)分析如下:
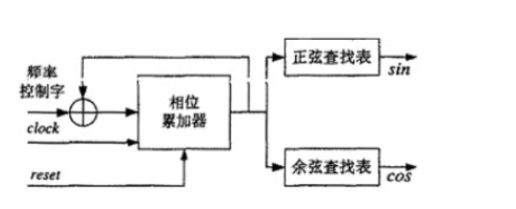
PWM驅動模型如圖2所示。本系統(tǒng)中采用的是雙極性四橋式PWM驅動,其傳遞函數可以寫為:
(1)
圖2 PWM驅動模型
當PWM開關頻率較高,并且系統(tǒng)的截止頻率時,上式可以簡化為:
(2)
其中kPMW= 電源電壓/三角波電壓;T為PWM開關周期。
一般來說T非常小,可以忽略延遲環(huán)節(jié)。
電機模型
電機選用的是永磁直流力矩電機,系統(tǒng)采用的是電壓調速。由此可以得到電機的模型:
(3)
其中R為電機繞組電阻,L為電機繞組電感,U2表示調制電壓輸入,I表示流過電機繞組的電流,E為電機繞組反電勢,J為負載轉動慣量,M為電機輸出力矩,ω為電機轉速(即負載轉速),Ce和Cm分別為電機的反電勢常數和力矩常數。
這樣可以得到整個電流環(huán)閉環(huán)結構形式如圖3所示,圖中Md為干擾力矩。
圖3 電流環(huán)反饋框圖
根據實際電路計算,得到電流環(huán)控制器為:
,其中 (4)
3.1 控制器設計
光電穩(wěn)瞄一般為兩軸或三軸陀螺穩(wěn)定平臺,各個軸從控制系統(tǒng)的構成來講,具有相似結構。兩軸平臺包括方位軸和俯仰軸,這里以方位軸為例進行控制器設計。
光電穩(wěn)瞄系統(tǒng)所用陀螺為速率陀螺,從陀螺的資料手冊上查得的陀螺數學模型[3]為:
(5)
式中:kg=10,ω=100Hz,ξ=0.707。
根據前面的分析建立經典控制系統(tǒng)Simulink仿真模型如圖4所示。
圖4 經典控制系統(tǒng)Simulink仿真模型
利用Simulink中的線性化工具將對象線性化,其結果作為sisotool控制器設計的基礎,從sisotool工具箱中設計控制器:
(6)
設計后系統(tǒng)根軌跡和開環(huán)頻率特性結果如圖5所示。
圖5 sisotool工具箱設計的控制器
從圖中可以看出系統(tǒng)幅值裕度為12.4dB,相角裕度為51.6o。
3.2 控制系統(tǒng)仿真
將設計的控制器加入系統(tǒng)Simulink仿真模型得到系統(tǒng)階躍響應結果如圖6所示,頻率特性如圖7所示。
圖6階躍響應仿真結果
圖7 仿真頻率特性
從圖6中可以看出,超調量為24.4%,調節(jié)時間約為115ms。從圖7仿真頻率特性可以看出,系統(tǒng)的帶寬約為25Hz。
4、數字控制硬件平臺
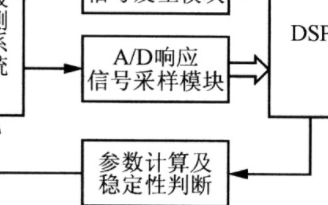
數字控制硬件結構如圖8所示。系統(tǒng)包括DSP芯片、A/D電路、D/A電路和信號調理電路。硬件平臺核心器件是TMS320F2812數字信號處理芯片。TMS320F2812的最高運行頻率可達150MHz,片上存儲器最多達128K×16位的Flash存儲器,最多達128K×16位的ROM,1K×16位的OPT ROM,兩塊4K×16位的單周期訪問RAM,一塊8K×16位的單周期訪問RAM,兩塊1K×16位的單周期訪問RAM[4]。由于TMS320F2812片內RAM資源有限,系統(tǒng)中外擴了一片512K的RAM芯片。
圖8 數字控制硬件結構框圖
陀螺輸出的電壓經信號調理電路后進入A/D芯片,TMS320F2812從A/D芯片讀入轉換的電壓數據,經算法計算后,DSP芯片將輸出的值送入D/A芯片輸出電壓,輸出的電壓經電壓跟隨提高驅動能力后進入電機驅動電路,由力矩電機驅動陀螺穩(wěn)定平臺。
A/D轉換芯片采用AnalogDevices公司的16位6通道模數轉換芯片AD7656。此芯片輸入電壓范圍為-10V~+10V。
陀螺輸出信號要經過遠距離傳輸,為了降低陀螺信號的噪聲,穩(wěn)瞄系統(tǒng)中采用差分形式傳輸陀螺輸出信號。本設計中模數轉換芯片AD7656為單端輸入方式,因此需要將陀螺輸出的差分信號轉換成單端信號。轉換電路采用AnalogDevices公司的AD620儀表放大器芯片,該芯片的1腳和8腳之間接的電阻 決定其放大倍數,放大倍數計算公式如下:
(7)
由式7可知,當電阻 為無窮大時放大倍數 ,本設計中選擇放大倍數為1。
D/A轉換芯片采用AnalogDevices公司的12位4通道數模轉換芯片DAC8412,輸出電壓范圍為-10V~+10V,輸出的通道由DSP的地址低兩位A1和A0選擇。DAC8412芯片的±10V輸入參考電壓由AD688芯片產生。
5、試驗與分析
a) 通道精度測試
1) A/D電路精度測試
用標準電壓源測試A/D電路的采樣精度,測試結果如圖9所示。圖中橫軸為輸入到A/D電路的標準電壓源電壓值,縱軸為AD7656芯片轉換出的數據,圖中黑點為實際測試的數據點,直線為理想狀態(tài)下的A/D電路采樣曲線。
圖9 A/D電路精度測試結果
可以看出,測試的數據點基本上位于理想A/D電路采樣曲線上,為此算法中不需要對A/D電路采樣的數據進行補償。
2) D/A電路精度測試
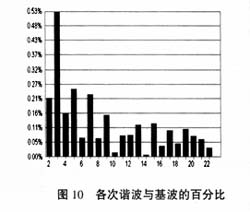
通過輸出標定值來標定D/A電路的輸出精度,測試結果如圖10所示。圖中橫軸為DAC8412要輸出的標定電壓值數據,縱軸為D/A電路實際輸出的電壓值,圖中黑點為實際測試的數據點,直線為理想狀態(tài)下的D/A電路輸出曲線。
圖10 D/A電路精度測試結果
可以看出,測試的數據點基本上位于理想D/A電路輸出曲線上,為此算法中不需要對D/A電路輸出的電壓值進行補償。
b) 伺服周期的設定
采樣周期是數字控制系統(tǒng)的一個非常重要的指標,高性能伺服控制系統(tǒng)一般采樣率不小于1KHz,為此要測量算法運行所需的時間,確保其在伺服周期內完成。
利用DSP的IO口,在算法運行之前置IO口為低電平,算法運行之后置IO口為高電平,從示波器測量出低電平的時間即為算法運行所需時間,測試結果如圖11所示。可以看出算法運行所需時間為55 ,滿足一般高精度數字控制系統(tǒng)的控制頻率為1kHz要求。本設計中設定采樣周期1ms。
圖11 算法運行所需時間測試結果
c) 控制系統(tǒng)動態(tài)測試
1) 階躍響應
為系統(tǒng)加入階躍信號,用示波器測量得到階躍響應曲線如圖12所示。圖中上方的曲線為給定階躍信號曲線,下方的曲線為系統(tǒng)的響應曲線。可以看出,上升時間約為20ms,峰值時間約為40ms,調節(jié)時間約為100ms,超調量約為37%。
圖12 系統(tǒng)階躍響應曲線
2) 系統(tǒng)頻率特性
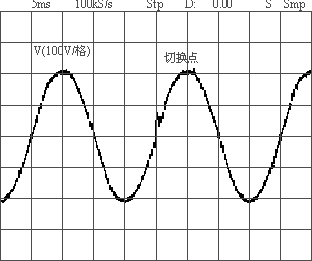
經掃頻得到系統(tǒng)的閉環(huán)特性曲線如圖13所示。從圖13可以看出,系統(tǒng)帶寬約為17Hz。
圖13 系統(tǒng)的閉環(huán)特性曲線
穩(wěn)定環(huán)路是光電穩(wěn)瞄系統(tǒng)的關鍵,影響到光電穩(wěn)瞄的穩(wěn)定性能。論文設計的控制器可以滿足光電穩(wěn)瞄的應用需求,搭建的數字控制硬件平臺為在機載光電穩(wěn)瞄控制中實現復雜的算法建立了實現平臺。從仿真和試驗的結果可以看出,數字控制實現機載光電穩(wěn)瞄穩(wěn)定控制設計簡單且可靠,系統(tǒng)穩(wěn)定性能和動態(tài)品質較好。數字控制在機載光電穩(wěn)瞄穩(wěn)定環(huán)路控制中得到了成功應用,系統(tǒng)穩(wěn)定控制器的設計和調試變得簡單、靈活、高效。論文也為其它復雜算法在機載光電穩(wěn)瞄中應用打下了基礎。












 工商網監(jiān)
工商網監(jiān)
評論