雙目視覺三維定位原理解析
雙目立體視覺是一門有著廣闊應(yīng)用前景的學(xué)科,根據(jù)雙目立體視覺CCAS提供的思路及組成原理,隨著光學(xué)、電子學(xué)以及計(jì)算機(jī)技術(shù)的發(fā)展,將不斷進(jìn)步,逐漸實(shí)用化,不僅將成為工業(yè)檢測、生物醫(yī)學(xué)、虛擬現(xiàn)實(shí)等領(lǐng)域的關(guān)鍵技術(shù),還有可能應(yīng)用于航天遙測、軍事偵察等領(lǐng)域。目前在國外,雙目立體視覺技術(shù)已廣泛應(yīng)用于生產(chǎn)、生活中。
雙目視覺三維定位原理
雙目立體視覺三維測量是基于視差原理。
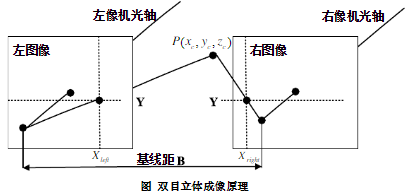
其中基線距B=兩攝像機(jī)的投影中心連線的距離;相機(jī)焦距為f。設(shè)兩攝像機(jī)在同一時(shí)刻觀看空間物體的同一特征點(diǎn)(xc,yc,zc),分別在“左眼”和“右眼”上獲取了點(diǎn)P的圖像,它們的圖像坐標(biāo)分別為pleft=(Xleft,Yleft),pright=(Xright,Yright)。
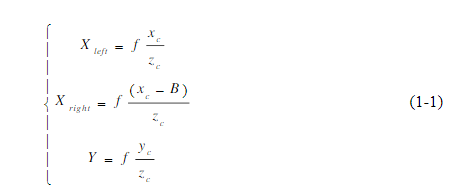
現(xiàn)兩攝像機(jī)的圖像在同一個(gè)平面上,則特征點(diǎn)P的圖像坐標(biāo)Y坐標(biāo)相同,即Yleft=Yright=Y,則由三角幾何關(guān)系得到:
則視差為:leftrightDisparityXX??。由此可計(jì)算出特征點(diǎn)P在相機(jī)坐標(biāo)系下的三維坐標(biāo)為:
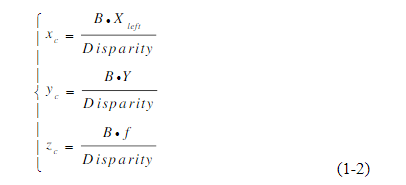
因此,左相機(jī)像面上的任意一點(diǎn)只要能在右相機(jī)像面上找到對應(yīng)的匹配點(diǎn),就可以確定出該點(diǎn)的三維坐標(biāo)。這種方法是完全的點(diǎn)對點(diǎn)運(yùn)算,像面上所有點(diǎn)只要存在相應(yīng)的匹配點(diǎn),就可以參與上述運(yùn)算,從而獲取其對應(yīng)的三維坐標(biāo)。
雙目立體視覺的三維測量方法
雙目立體測量的特點(diǎn)類似于“雙目導(dǎo)航、定位”,一般來說:第一、需要提取的點(diǎn)不多,僅把被測物需要測量部分的點(diǎn)找到即可;第二、速度要求較高,一般要求一秒中測量多個(gè)產(chǎn)品;第三、對光照環(huán)境要求高。因?yàn)闇y量的時(shí)候相機(jī)和被測物必然有相對位移,所以拍攝到的圖像可能各個(gè)角度都會(huì)有。一般的實(shí)現(xiàn)步驟如下:
第一、相機(jī)參數(shù)標(biāo)定。這部分前文已經(jīng)說過,不再細(xì)說了,有興趣的可以去看CCAS雙目立體視覺的相關(guān)資料。這部分的主要目的:獲取相機(jī)的內(nèi)參數(shù)和鏡頭畸變系數(shù)、獲取雙相機(jī)在當(dāng)前角度下立體參數(shù)。
第二、對被測物進(jìn)行拍攝,并獲取被測部分的特征點(diǎn)。這是雙目立體視覺測量最重要的部分。主要難點(diǎn)在于該用哪些算法來獲取特征點(diǎn),并且這種特征點(diǎn)的獲取方式上,不能用打激光點(diǎn)或手動(dòng)貼特征點(diǎn)這樣的方式來“取巧”,必須尊重原圖。根據(jù)CCAS提供的一些圖像預(yù)處理算法進(jìn)行實(shí)驗(yàn)后發(fā)現(xiàn),一般提取特征點(diǎn)時(shí)需要用到數(shù)十種以上的預(yù)處理算法,而這些算法中的參數(shù)需要不斷的去實(shí)驗(yàn)。由于CCAS提供二次開發(fā)庫,所以在一些極端情況下用戶還可以在其中加入一些其他的算法。其最終目的還是把特征點(diǎn)準(zhǔn)確的找到。
第三、三維坐標(biāo)獲取。完成以上步驟后,就可以進(jìn)行立體匹配并計(jì)算三維坐標(biāo)來。這部分比較簡單,只要給出來數(shù)學(xué)模型了直接帶入公式即可。CCAS提供了相應(yīng)的算法模型和和例程。
第四、指定測量范圍并輸出結(jié)果。
非常好我支持^.^
(130) 97%
不好我反對
(4) 3%
相關(guān)閱讀:
- [工業(yè)控制] 怎么個(gè)視覺定位呢?視覺加伺服的旋轉(zhuǎn)定位技術(shù) 2023-10-17
- [電子說] 可視覺定位的PCBA與FPC激光焊接系統(tǒng) 2023-08-22
- [電子說] CCD視覺定位激光打標(biāo)機(jī)實(shí)現(xiàn)全自動(dòng)的打標(biāo)和編碼 2023-08-13
- [電子說] 加入氣壓計(jì)模組,星斗3號將實(shí)現(xiàn)快速三維定位 2023-07-28
- [汽車電子] 如何利用動(dòng)態(tài)車輛施加的運(yùn)動(dòng)約束改進(jìn)視覺定位? 2023-07-17
- [電子說] 鎖定!利用動(dòng)態(tài)車輛施加的運(yùn)動(dòng)約束改進(jìn)視覺定位 2023-07-17
- [電子說] CCD視覺檢測—FPC柔性線路板視覺定位檢測 2023-07-07
- [電子說] 智造之眼丨飛拍聯(lián)合定位貼合 2023-06-12
( 發(fā)表人:李建兵 )