毫米波雷達前端系統設計
1 引 言
毫米波的工作頻率介于微波和光之間,20世紀90年代第二階段的微波毫米波集成電路規劃取得重大突破后,大功率毫米波功率源、介質天線、集成天線、低噪聲接收機芯片等相繼問世,使毫米波雷達發生了更新換代的變革,并且大大拓寬了它的應用領域。
2 毫米波雷達前端系統設計原理
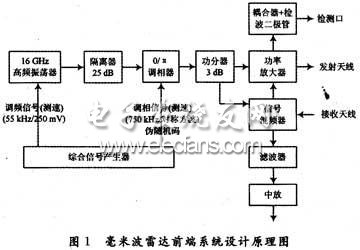
利用偽隨機編碼信號良好的自相關特性,低距離副瓣,獲得高的測量精度和距離分辨率。同時利用正弦波調頻信號體制的回波信號功率為距離函數的特點來有效地抑制近區雜波干擾。圖1為采用偽隨機編碼調相和正弦波調頻這兩種連續波信號的復合調制體制框圖。
16 GHz高頻振蕩器產生16 GHz±10 MHz微波振蕩信號,經正弦調制后信號送到調相器,進行隨機編碼調相。調相后的信號通過功分器,一部分放大后由發射天線輻射出去,另一部分泄漏信號加到信號混頻器。經天線輻射出去的射頻信號照射到目標后,目標反射的回波信號由天線接收,回波信號送到信號混頻器與泄漏信號混頻并濾除高頻信號,得到視頻信號。視頻信號放大后經過數字信號處理就可以送到耳機從而直接監聽目標運動情況、速度和狀態。
如圖1所示,雷達前端系統的主要組成部分有振蕩器、0/π調相器、功率放大器以及混頻器。
?
2.1 介質振蕩器
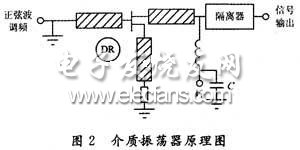
介質振蕩器采用如圖2所示的GaAs場效應管介質反饋型振蕩器。GaAs場效應管介質反饋型振蕩器可以采用漏極輸出或源極輸出兩種方式,為了獲得盡可能大的輸出功率,選用漏極輸出、源極直接接地的形式。
?
通常選用的介質振蕩器模式有TE01δ模、TM01δ模和HE11δ模,但在與微帶耦合時一般選用TE01δ模,因為其電磁場是圓對稱的,與微帶耦合非常方便,而且振蕩模式穩定。本文選用圓柱形介質諧振器,其直徑D=3.423 mm,高度h=2.28 mm。參數為:f=16 GHz,εr=40。實際電路中,在諧振器與微帶基片之間墊入一低介電常數、低損耗的介質片,用來減少微帶基片和金屬接地板對諧振器Q值和溫度性能的影響。
2.2 0/π調相器
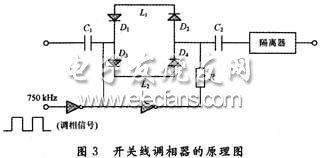
0/π 調相器采用開關線調相器。開關線調相器的電原理圖如圖3所示。L1,L2是兩條長度不同的微帶傳輸線(或者是其他任意微波傳輸線),D1,D2,D3,D4是4只性能一致的PIN二極管。當兩邊二極管互補偏置時,二極管D1,D2導通時,D3,D4處在截止狀態,載頻信號經L1 傳輸。反之,D1,D2截止時,D3,D4處在導通狀態,載頻信號經L2傳輸。很顯然,由于L1和L2長度不同,因而引起相移作用。
?
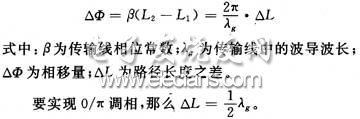
設較短的路徑為L1,較長的路徑為L2。則調相相位為:
?
- 第 1 頁:毫米波雷達前端系統設計
- 第 2 頁:功率放大器
本文導航
非常好我支持^.^
(3) 60%
不好我反對
(2) 40%
相關閱讀:
- [移動通信] 5G 3GPP全球頻譜介紹 2023-10-24
- [RF/無線] 雷達干擾技術分類有哪些 2023-10-24
- [電子說] 地鐵站臺內基于固體雷達的多種安全解決方案 2023-10-24
- [電子說] 突發!國產激光雷達第一廠商疑似成為特斯拉供應商?! 2023-10-24
- [電子說] 功率放大器的基本原理、分類、工作模式和應用 2023-10-23
- [電子說] 安信可新款雷達模組Rd-03E精準測距效果 2023-10-23
- [電子說] 英飛凌收購3db Access以追求更廣泛的UWB潛力 2023-10-23
- [電子說] RoboSense激光雷達E1榮膺“2023金輯獎中國汽車新供應鏈百強” 2023-10-23
( 發表人:小蘭 )