 電子發燒友App
電子發燒友App


引言
紅外(IR)接近傳感器目前被廣泛的應用于智能手機中來防止通話時用戶臉部造成的觸摸屏誤觸,同時降低功耗。IR傳感器具有探測距離遠,反映速度快等優點,但是其昂貴的成本和復雜苛刻的裝配要求,促使手機廠商尋求成本更低、結構簡單的方案。電容式接近感應在白色家電、智能家居等領域的普及,為手機接近感應方案提供了一種有效的思路。本文提出了一種基于電容變化的手機接近感應方案,給出了具體的系統結構、硬件設計和控制要點。此方案已經成功地應用到知名品牌的手機產品中,取得了很好的效果。
一 系統結構
電容式接近傳感系統的結構如圖1所示。控制器通過電極檢測物體靠近手機時引起的電容值變化,一旦電容值變化超過控制器程序中設定的閾值,控制器便會向手機處理器發出中斷信號, 如果此時手機正處于通話模式,主機將關閉LCD顯示和觸摸屏等部件,實現降低功耗和避免誤觸等目的。
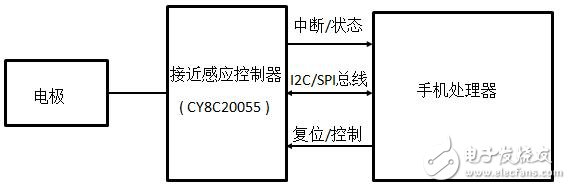
圖1 電容式接近傳感器的系統結構
電極負責探測電容變化,其設計質量很大程序上決定了系統的整體性能。電極本質上就是一塊平面導體,可以是FPC上的一塊銅皮,也可以是電容觸摸屏上的一塊ITO薄膜。
圖 2給出的ITO薄膜電極的設計示例。電極的尺寸直接影響接近感應的探測距離。在其他設計不變時,探測距離隨電極尺寸的增大而增大。電極在外形上要盡量圓滑,避免出現直角或者銳角,而且電極要盡量完整。在手機應用中,電極通常采用矩形來最大化感應面積,此時需要注意圓弧化電極的拐角。電極應該放在FPC或者ITO薄膜貼近觸摸屏的一側,而且背面的另一側通常需要騰空。電極背面對應的手機前殼區域應當避免有大面積的金屬,否則會影響探測距離。電極周邊需要鋪設地線來增強電容基準,屏蔽噪聲,并且提高感應方向的直線性。電極和地線的間距建議為0.5mm到1mm, 地線的寬度根據具體情況而定,建議不小于1mm。電極到芯片的引線應該盡量短且細,以減少寄生電容和耦合噪聲。
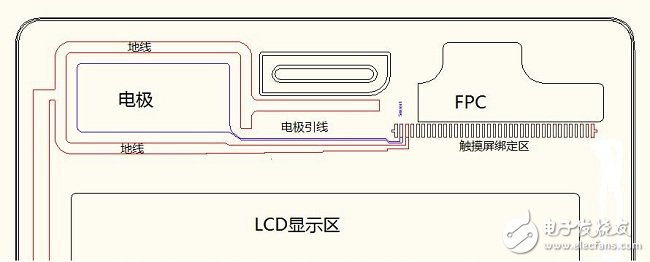
圖2 ITO薄膜電極設計圖
影響系統性能的另一個主要因素是控制器。我們選用了賽普拉斯(Cypress)公司具有全新Quitezone技術的可編程CapSense控制器 CY8C20055。 Quitezone技術提供了無與倫比的抗輻射和傳導噪聲的能力,并且具有超低功耗,很適合在手機等移動終端中使用。該技術還實現了業界最佳的信噪比 (SNR),在高噪聲的環境中也可以通過Cypress已獲專利的CapSense Sigma-Delta (CSD) Plus算法實現低至0.1pF的電容變化檢測,非常適合應用于接近感應。另外,CY8C20055采用SmartSense自動調教技術,可以實時動態補償運行時的環境變化,從而保證性能的穩定性和通道之間的一致性。
二 硬件電路
本文設計的電容式接近感應的電路圖如圖3所示。CY8C20055的外圍電路很簡單,最小配置只需要2個電容 — 調制電容C1和去耦電容C2。
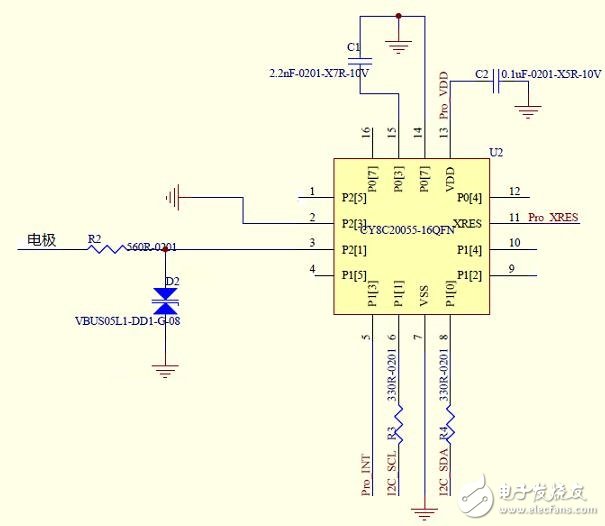
圖3 電容接近感應電路圖
在此電路中,芯片的PIN 3連接到電極來采集電容信號,推薦在連線靠近芯片處串聯一個典型值為560歐姆的電阻,來抑制RF噪聲。手機等移動產品都需要通過嚴格的ESD測試,由于電極的位置在手機上部,距離手機邊緣、聽筒、耳機插孔等很近(圖2),而且電極面積相對較大,ESD電弧很容易在經過這些開孔或者縫隙進入手機后耦合到電極上,對芯片管腳施加較大的電沖擊,存在損壞管腳的風險。本設計在靠近芯片一側添加了TVS之類的ESD防護元件來保護芯片,需要注意的是所選TVS器件的自身電容不能太大。CY8C20055提供I2C或者SPI接口與主機進行通訊。本設計中,主機可以通過I2C總線來配置感應參數、獲取數據、關閉或喚醒芯片等等,也可以進行芯片程序(Firmware)的在線升級。
在PCB或者FPC布局時,調制電容和去耦電容需要盡量貼近芯片管腳。在走線時,主要注意避免電極引線和I2C信號線、電源線平行,如果無法避免,應該在走線中間加入地線作為隔離。
三 控制器內部邏輯
本文的電容式智能手機接近感應方案是電容檢測技術在賽普拉斯 PSoC(Programmable System on Chip)平臺上的新型應用。PSoC技術是在一個MCU內核周圍集成了可配置的模擬和數字外圍器件陣列,利用芯片內部的可編程互聯陣列,有效地配置芯片上的模擬和數字塊資源,達到可編程片上系統的目的。一個PSoC器件最多可集成上百種外設功能,從而幫助客戶節約設計時間和板上面積,降低了功耗和系統成本。
整個系統的工作過程如圖4所示。程序控制CSD模塊對電容信號進行采樣和ADC轉換,然后通過數字濾波器對轉換后的數字信號進行過濾和處理,同時由內部狀態機判斷輸出接近感應的狀態,由中斷信號或者I2C/SPI接口通知手機處理器。下面來介紹一下整個系統主要模塊的功能。
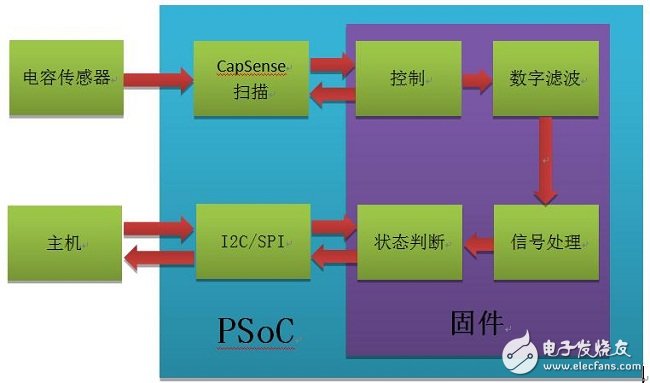
圖4 電容式接近感應PSoC系統的工作過程
★CSD模塊
CSD是指CapSense Sigma-Delta調制電容感應。圖5顯示了CSD的原理框圖。
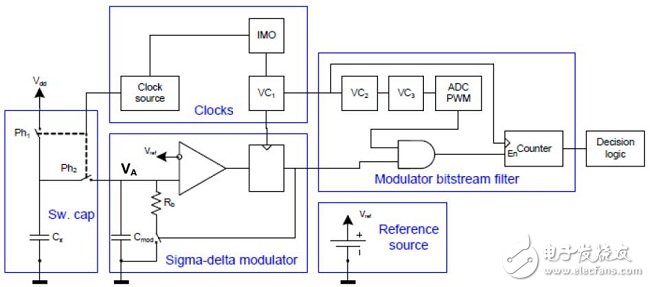
圖5 CSD原理框圖
開關電容在Ph1和Ph2相位的時候分別接到Vdd和VA,所以我們可以把它看作一個等效電阻,等效電阻Req通過Vdd對調制電容Cmod進行充電。當Cmod的電壓達到比較器的參考電壓Vref時,比較器觸發放電電阻Rb對調制電容放電。當調制電容上的電壓下降到Vref以下時,放電電阻Rb被斷開,此時繼續對調制電容進行充電。如此循環充放電使得調制電容上的電壓抑制在比較器參考電壓Vref附近上下浮動。同時比較器會輸出一組比特流,這組比特流與PWM相與之后便可得到傳感電容的大小,如圖6所示。


圖6 輸出比特流
傳感電容的增加會使得等效電阻降低,充電電流增加,這樣就會使充電時間縮短。充電時間的縮短會使占空比提升,如圖7所示。

圖7 有接近感應時占空比的變化
★數字濾波
接近感應要求控制器能夠檢測到穩定的小信號來提高探測距離,因此控制器需要設置足夠長的采樣周期來提高信號幅度,同時也需要設置較低的觸發閾值來提高靈敏度。靈敏度的提高意味著系統更容易受到噪聲的干擾。因此,為了提高整個系統的信噪比,本文對原始信號依次使用了三種有效的軟件濾波方法:中值濾波、均值濾波和IIR數字濾波,來濾除噪聲。
1.中值濾波器
對于瞬間出現的單點或連續幾點的噪聲,中值濾波器可以很好的進行過濾。圖8為一個三階的中值濾波器。可以看出P3點會在采樣后,被中值濾波器濾掉。在接近感應的實際應用中,由于采樣速率較快往往會出現這樣的噪點,中值濾波器可以很好的進行過濾,同時中值濾波器的輸出信號也會使得后面的均值濾波器以及IIR數字濾波器的輸入信號更加穩定。普通的n階中值濾波器的時間復雜度約等于n*n,所以其階數不宜過高,應根據實際的噪聲情況進行合理選擇。
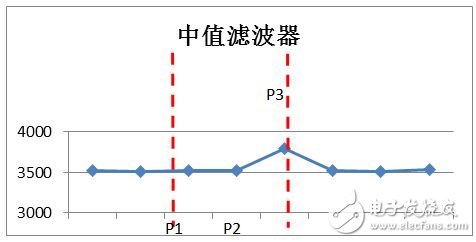
圖8 三階中值濾波器
圖9對比了實際采集的電容變化信號在使用中值濾波器前后的差異。紅色為使用中值濾波器前的信號,藍色為經過中值濾波器(三階)的信號。

圖9 中值濾波器輸入輸出信號對比
2.均值濾波器
均值濾波器則采用了對一組采樣數據取平均值得方法來提高信噪比。均值濾波器會使信號的幅值更加穩定,也就會使IIR數字濾波器的輸入更加穩定,相位偏差更小。但均值濾波器階數的增加會使得接近感應的檢測響應時間增加。圖10對比了信號在使用均值濾波器前后的差異。紅色為使用均值濾波器前的信號,藍色為經過均值濾波器(四階)的信號。
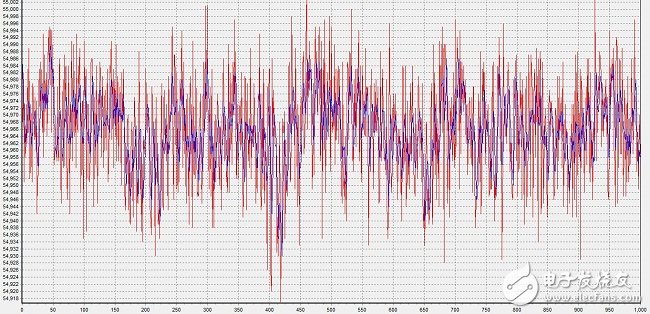
圖10 均值濾波器輸入輸出信號對比
3.IIR數字濾波器
IIR數字濾波器具有反饋,一般認為是無限的脈沖響應。同時IIR數字濾波器的幅頻特性精度很高,但相位不是線性的。也就是說在使用IIR數字濾波器的時候會使信號更加平滑,但同時會帶來延時,造成整個系統的實時性有所下降。圖11描述了IIR數字濾波器的原理。
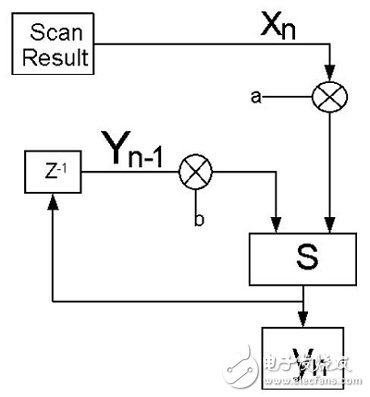
圖11 IIR數字濾波器原理
IIR數字濾波器在接近感應的應用中尤為重要,因為接近感應需要極高的靈敏度,所以信號需要十分的穩定和平滑。盡管IIR數字濾波器會對整個系統的響應造成一些延時,但由于資源的限制,軟件濾波只能采用這種方式。在圖11中,yn = a * yn-1 b * xn,對于系數a和b的選擇,本文經過了大量的數據仿真,還在此基礎上使用了Cypress專利,實現了動態調整系數a和b,使得整個系統的響應延時得到了明顯的降低。
圖12對比了信號在使用IIR數字濾波器前后的差異。紅色為使用IIR數字濾波器前的信號,藍色為經過IIR數字濾波器的信號。從圖中可以明顯地看出,經過IIR數字濾波器后的信號變得更加平滑,但同時也產生了一定的延時。

圖12 IIR數字濾波器輸入輸出信號對比
★信號處理
在處理信號的過程中,為了保證更大的信噪比,需要處理好信號與噪聲,圖13列出了信號與噪聲。同時為了保證信號能夠適應溫度等外界條件的變化,在信號處理中引入了基線這一機制。所有的信號都是以基線為基準,同時基線隨著外部環境的變化進行更新。更新的原則是,當信號小于噪聲的水平時,基線進行更新,一旦信號大于噪聲的水平,基線便不再更新。
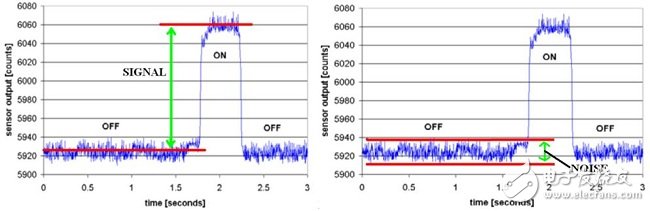
圖13 接近感應系統中的信號與噪聲
★狀態判斷
在距離感應的實際應用中,由于不同客戶有著不同的需求,所以在對于整個狀態機的處理需要遵循幾個原則:1. 保證檢測的可靠性。2. 在各種限定條件下保證檢測成功率最高。3. 盡量短的響應時間。
總結
本文設計的電容式接近感應探測系統具有結構簡單、成本低、易于調試和量產等優點,同時在探測距離、反應速度、穩定性等方面也具有較高的性能。該設計在知名客戶的智能手機中已經實現大規模量產,探測距離接近17mm, 響應速度的典型值是70ms, 并且通過了嚴格的ESD、EMC、溫度等測試,實現了客戶替換IR傳感器的目標。









 工商網監
工商網監
評論