 怎樣用Arduino制作一個可多人控制的機器人手臂
怎樣用Arduino制作一個可多人控制的機器人手臂
電池用于為板載伺服電源供電,Arduino由筆記本電腦供電,Arduino的電源和電池是短缺在一起。我不得不使用這種配置,因為Arduino的功率不足以驅動伺服系統,并且使用外部電源可以減少它們中的一些抖動。但是,我必須將Arduino連接到我的筆記本電腦,以便與處理服務器腳本一起運行。
電池連接到LM2596降壓轉換器模塊,降低了3S的11.1V LiPo到~5.8V。這些微伺服系統可能需要高達6V的電壓,然而,我將降壓轉換器調整到略低于5.8V,作為波動或電壓讀數錯誤的預防措施。然后,來自降壓轉換器的Vcc和GND線分成每個伺服器的4個并行路徑,GND也短接到Arduino上的一個GND引腳。每個伺服系統還有一條數據線連接到Arduino上的數字引腳。從下圖可以更清楚地理解電路原理圖。
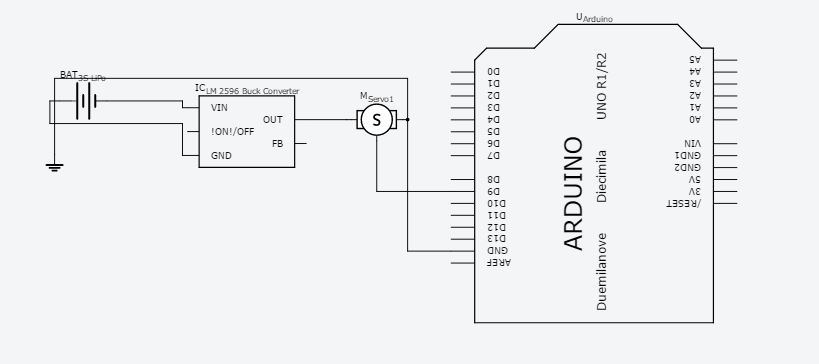
在上圖中,忽略FB和On/Off引腳。這與LM2596最相似。伺服Vcc連接到LM2596的輸出,其地連接到公共地,其數據引腳連接到Arduino上的GPIO。
多人控制的機器人手臂代碼
下一步是上傳代碼。為此,您需要訪問Web服務器。您可以在Raspberry Pi上托管服務器(我們有一個教程),或者購買一些托管服務一兩周。托管現在非常便宜。
在這種情況下,Web服務器基本上是云上的計算設備,它將存儲您網頁的所有代碼并存儲不同用戶發送的投票。現在,只要Arduino發出‘GET請求’,服務器就會將用戶收到的投票發送給正在運行Processing 3的Arduino。
我們將Arduino連接到筆記本電腦的原因是這是讓Arduino訪問網絡的簡單方法,而Processing 3,而不是Arduino IDE為我們提供了許多強大的工具來添加對機器人的修改。例如聲音庫。這可以用來收集投票。我們可以將所有用戶放在一個地方,而不是用戶點擊,通過大喊/吟唱同一個單詞來物理地嘗試獲得特定頻率。預先固定的頻率將啟動機器人的不同部分。
投票頁面的屏幕截圖
多人控制的機器人手臂!
-
Arduino
+關注
關注
188文章
6477瀏覽量
187559 -
機器手臂
+關注
關注
1文章
18瀏覽量
11592
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
開源項目!OpenCat—— 一個全能的平價四足機器人
變速齒輪在機器人中的使用
【開源項目】你準備好DIY一款功能強大的機器人了嗎?
PID控制在機器人技術中的應用
如果設計一款桌面款的機器玩具,最吸引人的外觀與功能要有哪些?
AMD Kria? KR 260套件+ROS 2快速開發機器人解決方案






 工商網監
工商網監
評論