 L293DIC的特征和規格
L293DIC的特征和規格
學術機器人使用的電機通常工作在5,6,9,12或24伏。根據型號,制造方法,價格等,它們的電流約為100 mA至5A。您可以通過多種方式使用電機。一種方法是將其直接連接到電池,然后以特定方向以最大速度旋轉,但實際上,我們需要控制電機(開關,速度控制,方向控制和位置控制)。/p》
因此,我們必須使用控制器(邏輯電路或微控制器或PC或計算機)控制電機。但是,如您所知,微控制器的輸出為5V和200mA,無法旋轉電機。因此我們需要中間電路將控制器連接到電機,稱為驅動器。
L293D是市場上最受歡迎的驅動器之一。有幾個原因使L293D成為用戶的首選驅動器,例如價格便宜(與其他驅動器相比),形狀和尺寸合適,易于控制,無需保護電路和二極管,無需散熱片和良好的電阻溫度和高速變化。該IC可以設置電壓為5V至36V,電流高達600 mA的電機。但是,它可以在100微秒內承受高達1200 mA的電流且不重復。該IC的頻率為5 kHz。如果您的電機符合這些規格,請不要猶豫使用L293D。
功能和規格
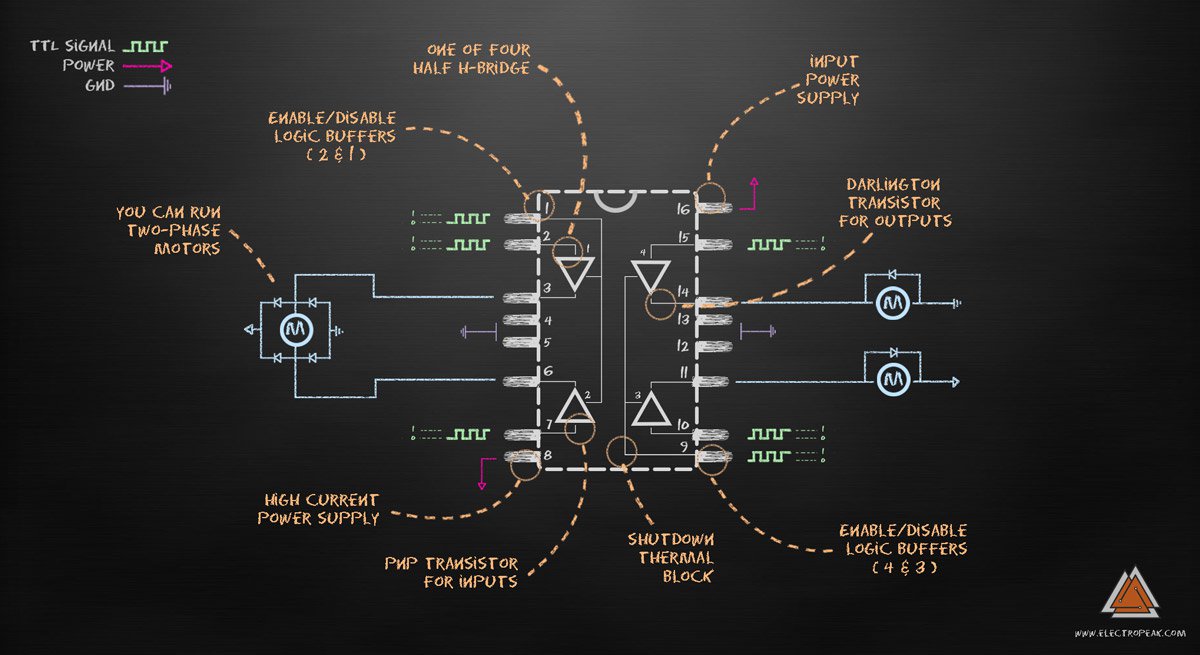
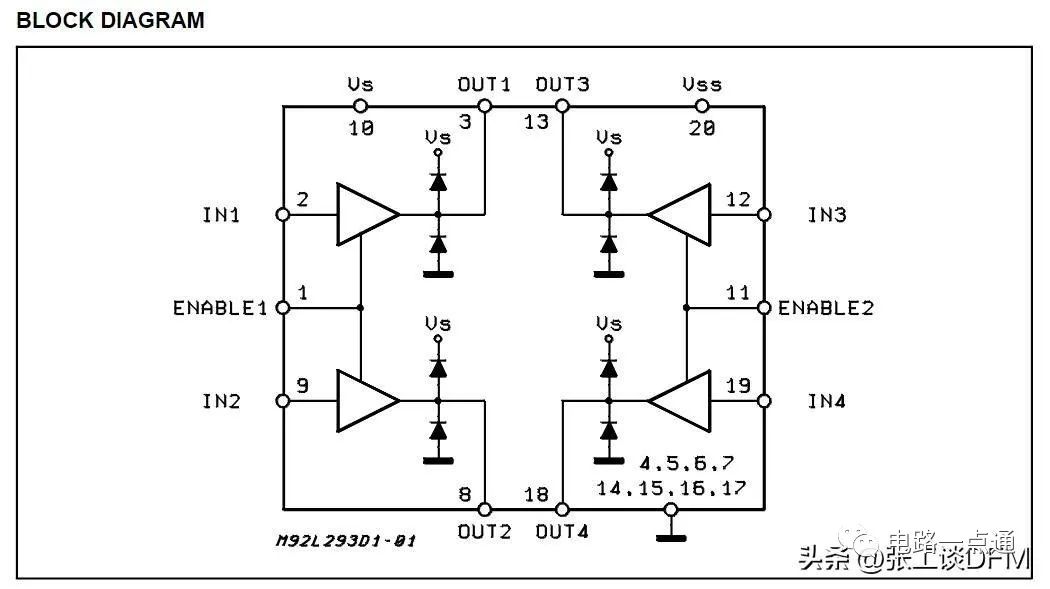
L293和L293D器件是四倍高電流半H驅動器。 L293設計用于在4.5 V至36 V的電壓下提供高達1 A的雙向驅動電流.L293D設計用于在4.5 V至36 V的電壓下提供高達600 mA的雙向驅動電流。兩種器件均為設計用于驅動感應負載,如繼電器,螺線管,直流和雙極步進電機,以及正電源應用中的其他高電流/高壓負載。
每個輸出都是一個完整的圖騰柱驅動電路,使用達林頓晶體管吸收器和偽達林頓源。驅動程序成對啟用,驅動程序1和2由1,2EN啟用,驅動程序3和4由3,4EN啟用。 L293和L293D的特點是工作溫度范圍為0°C至70°C。
其他重要的 L293D功能包括:
寬電源電壓范圍:4.5 V至36 V
獨立的輸入邏輯電源
內部ESD保護
高抗噪性輸入
輸出電流每通道1 A(L293D為600 mA)
峰值輸出電流每通道2 A(L293D為1.2 A)
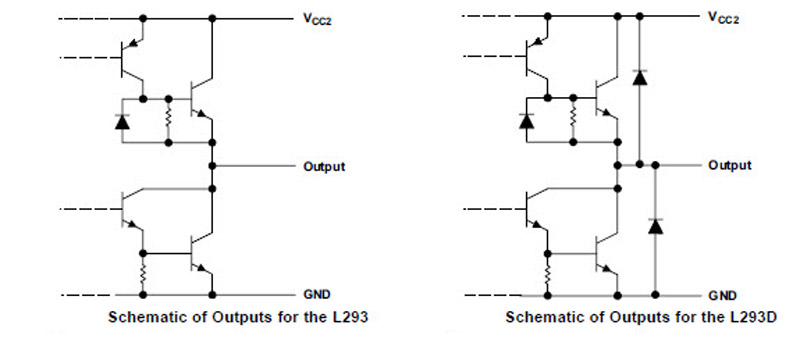
用于感應瞬態抑制的輸出鉗位二極管(L293D)
整體L293D圖
模擬 - L293
H-bridge& Half-H
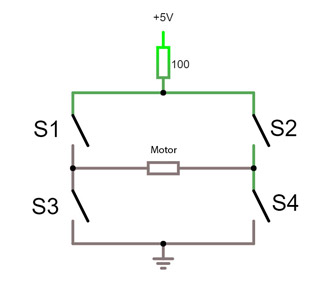
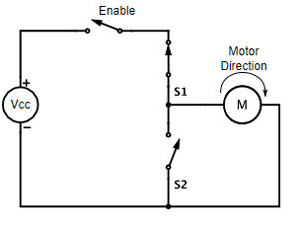
H橋是一種電子電路,可以在相反方向的負載上施加電壓。這些電路通常用于機器人和其他應用,以允許直流電機向前或向后運行。
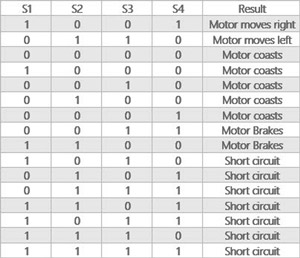
術語H橋是從這種電路的典型圖形表示中得出的。 H橋由四個開關(固態或機械)構成。當開關S1和S4(根據第一圖)閉合(并且S2和S3斷開)時,將在電動機上施加正電壓。通過打開S1和S4開關并關閉S2和S3開關,該電壓反轉,允許電機反向操作。
使用上面的命名法,開關S1和S2不應同時關閉,因為這會導致輸入電壓源短路。這同樣適用于開關S3和S4。這種情況稱為直通。
模擬 - H橋
模擬 - H橋 - 指南
但是L293是一個四重半H橋。半個H橋將輸出引腳連接到Vcc或接地或斷開它。使用一個可以打開或關閉直流電機或應用于制動但不能反轉電機。要反轉直流電機,您需要兩個H橋的一半。
達林頓晶體管
在電子學中,達林頓晶體管(通常稱為達林頓對)是一種特殊設計的復合結構,由兩個連接在其中的雙極晶體管組成。由第一晶體管放大的電流被第二晶體管進一步放大的方式。這種配置提供了比單獨采用的每個晶體管高得多的電流增益。
Sidney Darlington于1953年發明
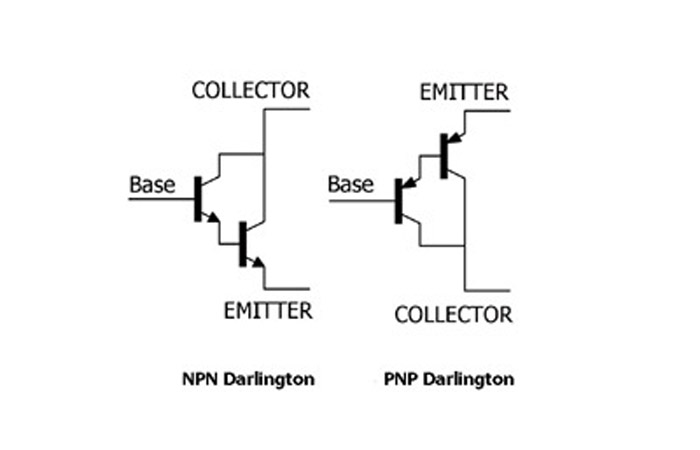
如果我們看到達林頓晶體管的符號我們可以清楚地看到兩個晶體管是如何連接的。在下圖中,示出了兩種類型的達林頓晶體管。左邊是NPN Darlington,另一邊是PNP Darlington。我們可以看到NPN達林頓由兩個NPN晶體管組成,PNP達林頓由兩個PNP晶體管組成。第一晶體管的發射極直接連接在另一個晶體管的基極上,兩個晶體管的集電極也連接在一起。該配置用于NPN和PNP達林頓晶體管。在這種配置中,該對或達林頓晶體管產生更高的增益和大的放大能力。
模擬 - 達林頓晶體管
L293D Pinout
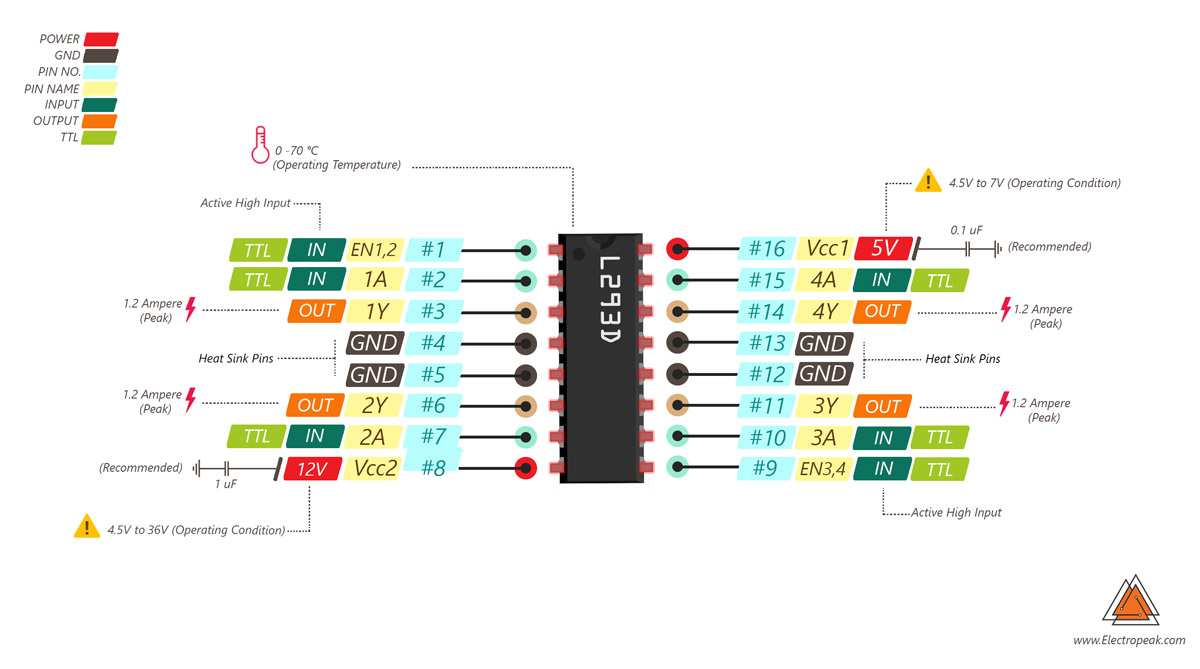
L293或L293D?!
L293和L293D有什么區別?名稱中的字母D表示內部安裝的二極管,這意味著我們不需要添加任何外部組件。這是主要的區別。如果查看數據表,您可以看到其他一些差異,如輸出電流。此外,L293輸出中的連續電流為1A,而L293D輸出中的持續電流為600 mA。 L293輸出中的峰值電流為2安培,L293D輸出為1.2 A
-
L293D
+關注
關注
4文章
50瀏覽量
20120
發布評論請先 登錄
相關推薦
EE-293:估算ADSP-BF561 Blackfin處理器的功耗

請問SN74V293可以使用18位輸入模式存儲AD轉換器輸出的12并行數據嗎?
貼片共模電感的命名規格、特征及應用
天馬微電子受邀出席DIC EXPO 2024
INA293采樣信號偏高如何解決?
求助,關于INA293 us級高側電流采樣遇到的疑問求解
天馬斬獲“DIC國際顯示技術創新大獎”
維信諾斬獲2024 DIC AWARD 7項大獎
京東方閃耀DIC 2024,榮獲八項大獎引領顯示科技新風尚
京東方攜創新顯示技術亮相DIC 2024
L293D雙路全橋驅動電路原理
L293D新型雙路全橋式驅動IC工作原理
L293D驅動器電路圖介紹





 工商網監
工商網監
評論