 如何用ESP8266ESP-01和串行端口以及Python構建一個自動指向接收器
如何用ESP8266ESP-01和串行端口以及Python構建一個自動指向接收器
原理圖
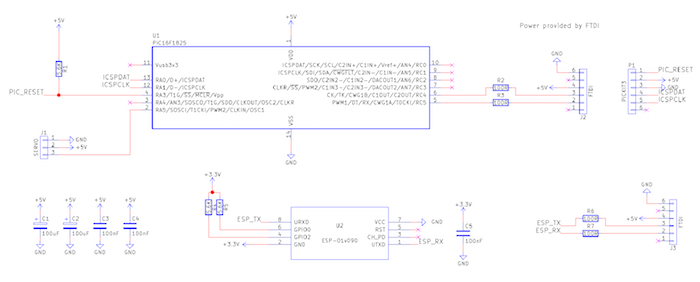
工作原理:硬件
接收器由兩個獨立的電路組成:
天線本身
電機控制器是連接到USB串行轉換器的PIC16F1825,它接收來自所連接計算機的命令。 PC發送的命令指示微控制器將電機伺服設置為特定角度,由于伺服連接到天線,天線將指向新角度。
天線的ESP8266 ESP-01模塊連接到Wi-Fi天線,可提高接收器的靈敏度。然而,這個天線是方向性的,這意味著如果天線沒有直接指向信號源,信號處于最弱的值,如果天線直接指向信號源,則信號處于最強值。
工作原理:軟件
電機驅動電路使用非常簡單的UART命令結構。數字串由連接的計算機發送并轉換為數值,指示伺服應指向的角度。伺服系統通過PWM信號的占空比進行控制,因此輸入角度被轉換為占空比,用于調節伺服的輸出PWM信號。
連接兩個天線的計算機電機控制器是用Python編程的,因為它允許使用各種各樣的計算機,包括PC,OS X,Linux,甚至是Raspberry Pi,它們可以使這個項目變得便攜。
Python腳本首先打開兩個串口(一個用于電機驅動器,另一個用于ESP-01模塊),然后配置ESP-01模塊。配置完成后,程序首先命令ESP-01掃描Wi-Fi網絡,找到我們的探測器網絡,然后讀取信號功率。該讀數被傳遞給用于存儲最高記錄信號強度的變量,然后程序運行for循環。這個for循環運行20次迭代,并且在每次迭代時,天線稍微移動,并且獲取新的信號讀數。
當這個讀數完成時,程序然后將天線指向角度給出了最高的讀數。
構造
該項目中的電路可以使用大多數技術構建,包括條形板,矩陣板,面包板和定制PCB。對于伺服控制器,我使用了定制PCB,但天線系統使用跳線將ESP-01直接連接到USB串行轉換器。
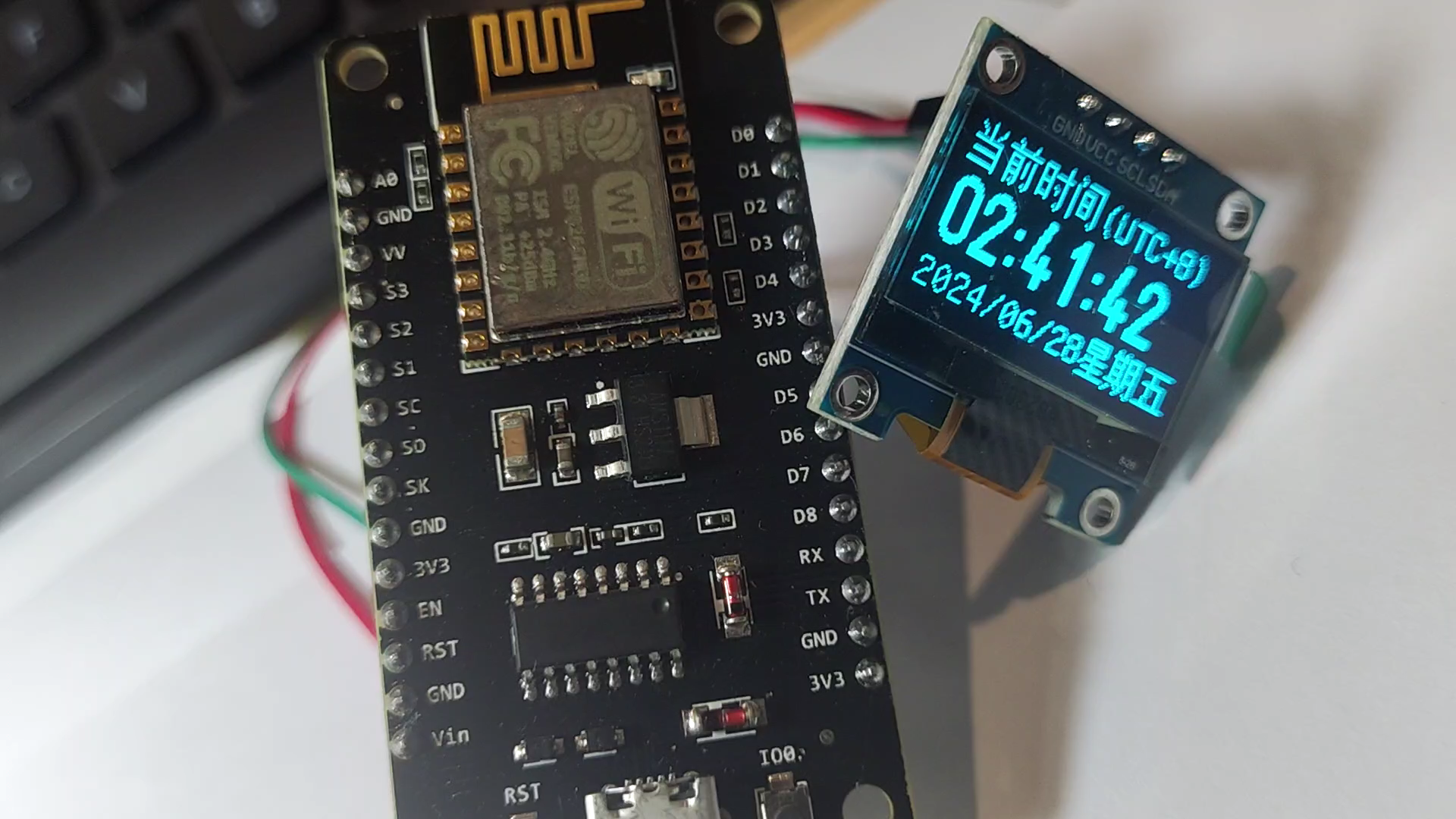
完整的接收器
伺服控制器板
天線是一個定向天線,由連接到伺服的舊錫制成,內部有一小段線作為接收元件。您可以在這里學習如何制作錫罐Wi-Fi天線。這還包括一個計算器,用于確定您的電線需要放置在罐內的確切位置。
天線背面顯示一個保護ESP8266免受雜散Wi-Fi信號影響的蓋子。
波導內的天線。
移動波導和天線的伺服。
-
接收器
+關注
關注
14文章
2472瀏覽量
71914 -
python
+關注
關注
56文章
4797瀏覽量
84692 -
串行端口
+關注
關注
0文章
31瀏覽量
11667
發布評論請先 登錄
相關推薦
把esp8266加入到c51單片機單通道程序怎么寫
esp32和esp8266代碼共用嗎
esp8266不燒錄可以使用嗎
esp8266wifi模塊怎么連接手機
是否可以創建一個包含多個esp8266模塊(esp-01)的網狀網絡?
是否可以使用ESP-NOW協議,將ESP8266板作為與其他ESP8266板之間的中繼器?
使用ESP8266板和AT命令集構建一個多客戶端HTTP服務器遇到的疑問求解
ESP8266 Huzzah不響應AT命令的原因?
國產低成本Wi-Fi SoC解決方案芯片ESP8266與ESP8285對比差異





 工商網監
工商網監
評論