 可實時深組織成像并控制的微機器人系統
可實時深組織成像并控制的微機器人系統
想象一下,未來某天我們會制造出如細胞般大小,具有微納米尺度的馬達、汽車、飛機、潛水艇、甚至機器人。這些微納米尺度的馬達或機器人可以在我們的血液中游弋,攜帶藥物運動到病患區域、最終治療威脅人類生命的疾病。
今年,加州理工學院高偉(Wei Gao)教授研究團隊和汪立宏(Lihong V. Wang)教授研究團隊設計的可在腸道內實時定位并控制的微米機器人系統,正在向這些科幻作品中的情節一步步靠近……
這項合作完成的突破今天以An ingestible microrobtic system using photoacoustic imaging for targeted navigation in intestine為題,發表于Science Robotics,引起微納機器人界的廣泛關注。
常規的藥物遞送主要依靠血液循環運輸完成,這種被動擴散方法受到多重生物屏障的阻礙不但導致有效劑量嚴重不足同時引發全身性的毒副作用,難以完成精準藥物遞送的需求。微納機器人因其可在生物流體中進行可控自主運動,被認為是靶向藥物遞送的理想方案。但是,對于微納機器人的實際醫學應用,如何讓微納機器人實現在體內實時成像與控制仍然面臨著挑戰。
可實時深組織成像并控制的微機器人系統
面對微納機器人體內深層組織下實時成像與控制的難題,Science Robotics今天上線的這篇論文,介紹了加州理工學院高偉教授團隊與汪立宏教授研究團隊合作的最新研究成果,該研究成果為解決微納米機器人生物醫療中體內成像和控制的瓶頸難題提供了思路。
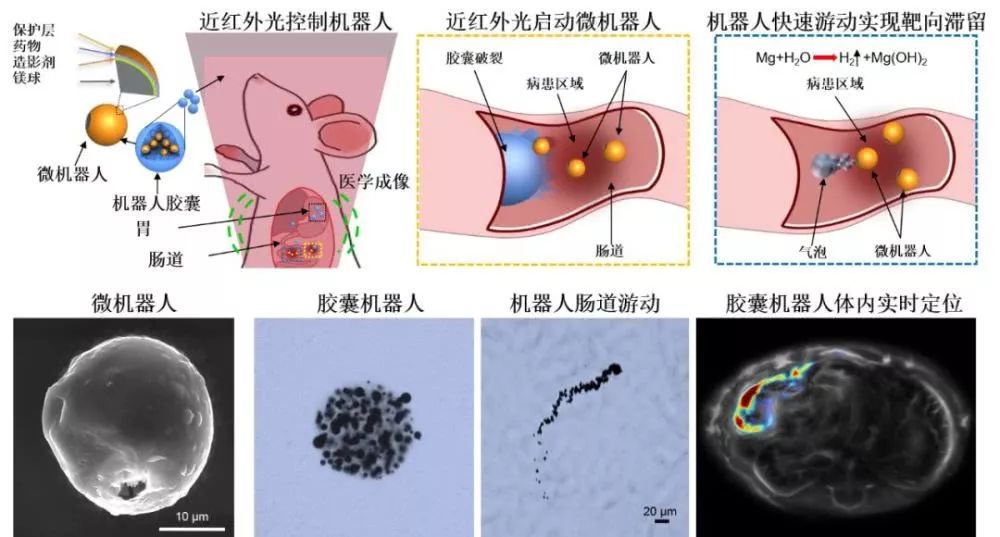
研究團隊設計了基于光聲斷層掃描技術實現動物體內實施成像并控制的微機器人系統。他們將微米機器人包裹于具有保護層的微膠囊內以免于胃酸等流體的侵蝕,借助光聲斷層成像技術,包裹在微膠囊內的載藥微納機器人可在動物體內的實時定位,當微機器人膠囊抵達體內病患區域(比如腸道腫瘤)時,外源近紅外光可以穿透深層組織并引發膠囊破裂從而釋放微機器人。釋放出的微機器人依靠其高效游動可穿越生物屏障最終實現在病患區域的滯留和持久的藥物傳遞。
高偉教授認為,這種微米機器人可以穿透消化道的粘液并在那里停留很長時間。這有助于提高藥物的供給,由于這種微米機器人主要由鎂組成,因此具有生物相容性和生物可降解性。我們設想構建到達患病區域后可按需激活微型機器人,下一步的研究將著力于這種機器人的治療效果。
汪立宏教授對于生物醫學微納米機器人的未來做了進一步的思考:你可以把這種微型機器人微放在你需要的地方,它們未來可以被用于藥物遞送或者智能微手術。高偉教授與汪立宏院士團隊還將繼續合作以期實現更多突破。
作為論文的通訊作者之一,高偉教授近年來致力于柔性電子、可穿戴設備和生物醫學納米機器人方面的研究并在《自然》、《自然 通訊》、《美國國家科學院院刊》、《美國化學會會刊》、《納米通訊》、《美國化學會 納米》、《先進材料》等期刊發表論文80余篇,總引用超過9000次,高引用次數 (H-index) 51。
-
柔性電子
+關注
關注
4文章
180瀏覽量
15999 -
納米機器人
+關注
關注
0文章
43瀏覽量
11705 -
可穿戴設備
+關注
關注
55文章
3816瀏覽量
167113
原文標題:[機器人頻道|物聯網]加州理工微機器人體內實時成像調控并治療疾病!
文章出處:【微信號:robovideo,微信公眾號:機器人頻道】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
《具身智能機器人系統》第7-9章閱讀心得之具身智能機器人與大模型
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
Al大模型機器人
簡述工業機器人控制系統的特點
運動控制和機器人系統有什么區別
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
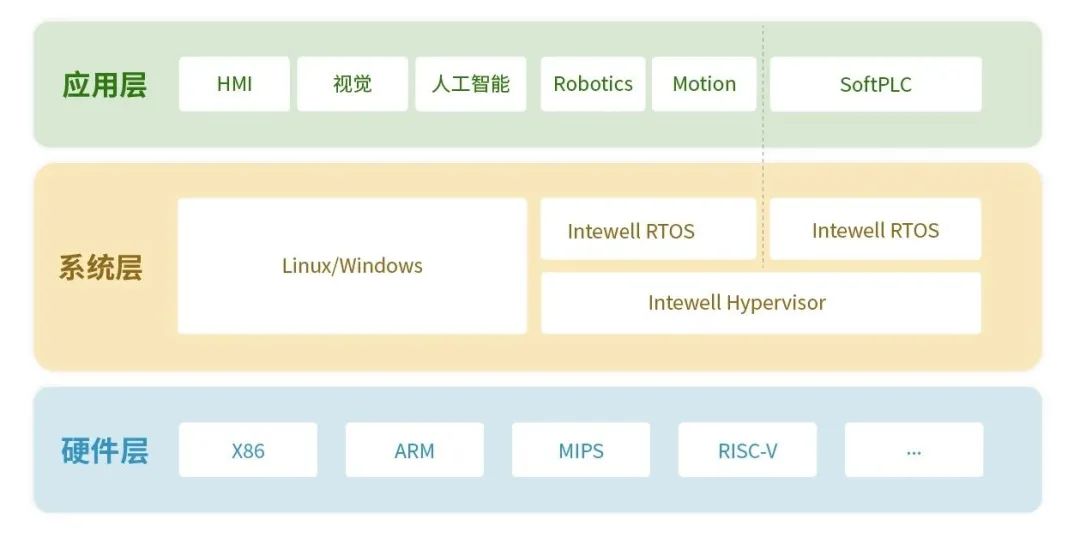
工業控制:鴻道(Intewell)操作系統工業機器人控制解決方案
紅外熱成像設備在機器人領域的應用






 工商網監
工商網監
評論