 關于車聯網“端到端”測試方案的介紹和應用
關于車聯網“端到端”測試方案的介紹和應用
未來的智能交通系統會采用IEEE 802.11p的無線標準,作為“車輛—車輛”、“車輛—路側”(V2I)的通訊方式,通過這些方式,車輛和基礎設施之間可以共享事故、施工、路況等信息,以提高駕駛的安全和通行效率。在法國波爾多舉行的全球ITS大會上,羅德與施瓦茨聯合Vector和Commsignia公司,演示了車聯網“端到端”測試方案。在一個模擬車身的環境中,車載單元接收到真實的802.11p信號,并把解析的結果顯示在一個中控臺屏幕上。
羅德與施瓦茨的R&S TS-ITS100全自動射頻一致性測試系統提供了“車輛—車輛”(V2V)、“車輛—路側”通訊的完整測試方案。該系統結合Vector公司提供的CANoe汽車總線測試軟件平臺,可以監控無線通訊以及車內總線通訊,甚至可以模擬其中的一部分。Commsignia公司則為這次演示提供了被測件 — ITS-OB2-M車載802.11p單元。該系統可以模擬完整的“端到端”測試鏈路,可以產生真實的射頻信號,并經過模擬的信道環境,到接收并顯示在中控臺屏幕上,整套系統有助于整車廠商和零部件供應商驗證產品的功能和性能。

演示中,R&S TS-ITS100生成一個“注意,前車急剎”的告警信號,并通過802.11p網絡發射出來,并經過信道模擬器,對理想信號進行加擾、衰落、失真,以模擬真實場景,Commsignia公司提供的ITS-OB2-M車載單元接收到該信號,并把消息轉換成CAN總線格式,并發送給車輛總線,與此同時,CANoe系統一直在監控著車輛總線,并把這個消息顯示在一個模擬的中控屏幕上。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
智能交通
+關注
關注
12文章
804瀏覽量
43493 -
車聯網
+關注
關注
76文章
2587瀏覽量
91633 -
模擬器
+關注
關注
2文章
877瀏覽量
43261
發布評論請先 登錄
相關推薦
“端到端”智駕芯片,英偉達DRIVE Thor接棒,車企自研芯片對標行業領先
。 ? 在智駕芯片層面,不少廠商采用了英偉達的DRIVE Orin芯片,以及下一代智能駕駛計算平臺Thor進行開發,MDC610、地平線征程5、征程6芯片、小鵬圖靈AI芯片等也加入端到端方案當中。 ? 打造“
特斯拉帶火“端到端”智駕,國內車企加速上車
2024年1月,特斯拉開始大規模推送FSD V12,從此“端到端”智能駕駛在汽車行業興起。小鵬、理想、智已、商湯等公司也紛紛推出自家的端到


智己汽車“端到端”智駕方案推出,老司機真的會被取代嗎?
隨著智能駕駛技術的發展,行業已經從早期基于簡單規則和模塊化邏輯的自動駕駛,逐步邁向依托深度學習的高復雜度智能駕駛解決方案,各車企也緊跟潮流,先后宣布了自己的端到端智駕

Mobileye端到端自動駕駛解決方案的深度解析
自動駕駛技術正處于快速發展之中,各大科技公司和汽車制造商均在爭相布局,試圖在這個新興領域占據一席之地。Mobileye作為全球自動駕駛技術的領軍企業之一,憑借其獨特的端到端自動駕駛解決方案

端到端測試不正常如何處理
端到端測試(End-to-End Testing)是一種測試方法,它模擬用戶與系統的實際交互,從用戶界面開始,通過應用程序的所有層,直到數據
恩智浦完整的Matter端到端解決方案
恩智浦為打造Matter設備,提供了完整的端到端解決方案,從連接和安全解決方案到處理器和軟件,應有盡有,為Matter標準的規模化商用提供有

三端穩壓管怎么測試好壞
三端穩壓管怎么測試好壞 三端穩壓管是一種廣泛使用的電子元件,主要用于將輸入電壓穩定在一定的輸出電壓。在本文中,我們將詳細介紹如何測試三
周光:不是真“無圖”,談何端到端
“如果智能駕駛系統不能徹底擺脫高精度地圖,談何端到端。” ? 6月1日,元戎啟行CEO周光在粵港澳大灣區車展暨2024(第二屆)未來汽車先行者大會上表示。 ? 這并非周光第一次強調“無圖”方案
發表于 06-03 11:06
?3100次閱讀

華為IPv6+端到端解決方案通過信通院IPv6+ 2.0 Advanced測試評估
近日,華為IPv6+端到端解決方案成功通過中國信息通信研究院(以下簡稱“信通院”)IPv6+ 2.0 Advanced測試評估,獲得業界首張

理想汽車自動駕駛端到端模型實現
理想汽車在感知、跟蹤、預測、決策和規劃等方面都進行了模型化,最終實現了端到端的模型。這種模型不僅完全模型化,還能夠虛擬化,即在模擬環境中進行訓練和測試。
發表于 04-12 12:17
?468次閱讀

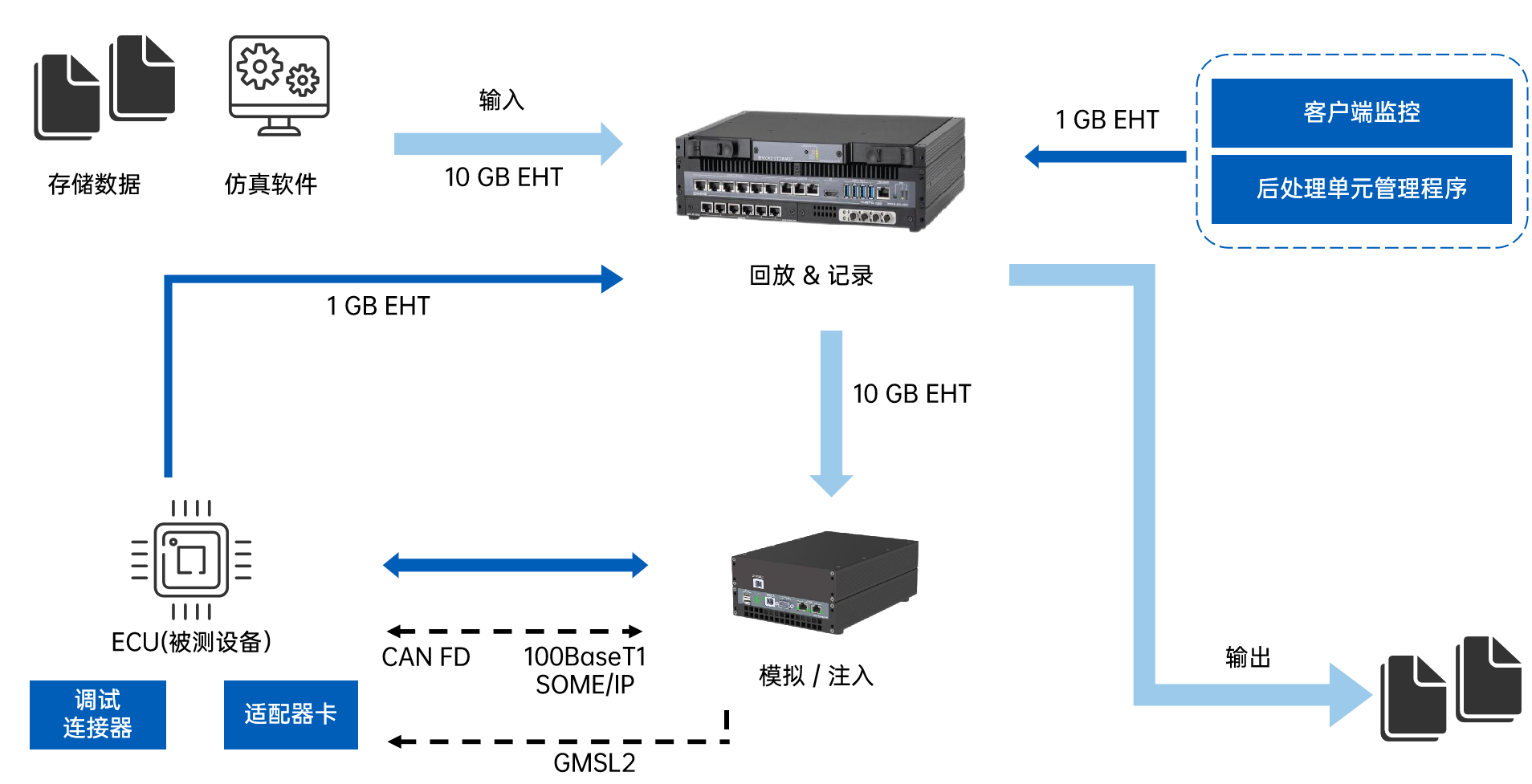
康謀方案 | 基于場景的端到端硬件在環(HiL)測試智能解決方案
。同時,針對不同傳感器進行協同工作,模擬不同的駕駛環境和交通狀況,測試和驗證自動駕駛車輛的算法和決策策略,從而確保其安全性和可靠性。 方案特點 針對ADAS/AD系統進行基于場景的端到





 工商網監
工商網監
評論