 關于制動秘籍的介紹
關于制動秘籍的介紹
制動的挑戰
道路千萬條,安全第一條;
制動不規范,研發兩行淚。
剎車制動除了要遵守交通規則,還有能量守恒規則。
如圖1所示,當電機驅動器進行反接制動減速時,在制動過程的①階段內,存儲在電機內的動能會通過電機驅動器以電能的形式返回至電源,給母線電容進行充電,這將會導致母線電壓的升高,一旦機電系統無法正確地處理這一部分的能量,那么節能減排的好事將會變成破壞性的傷害——這個升高的電壓可能會擊穿驅動或者其他接至相同電源的電路。(想要詳細了解電機制動方式和基礎知識的小伙伴們可以去看上一篇文章“制動秘籍之基礎篇”。)
Q:因此,如何解決這一問題,化解過壓損害呢?
A:少俠,我看你天資聰穎,就把這本制動中的“踏雪無痕”傳授給你。這一次,為了方便敘述,我們還是以直流電機系統為例,但該分析和應用方法同樣適用于無刷直流電機系統,以信接物,童叟無欺。
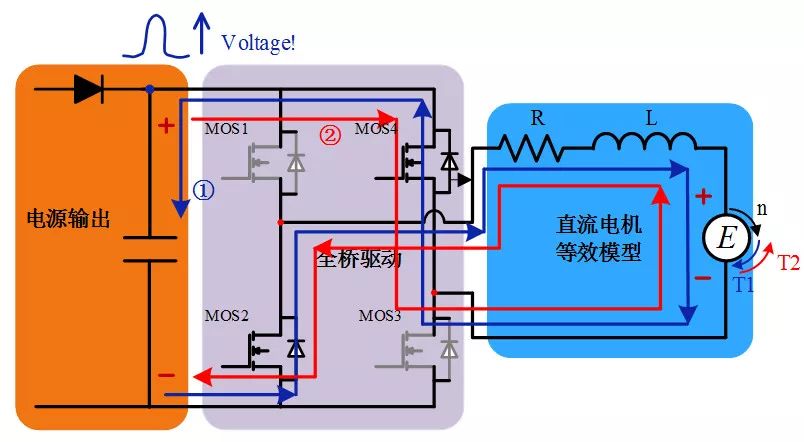
圖1:直流電機系統反接制動圖
對于處理制動回流的能量,一共有三招:
第一招是吸收——增加母線電容的容值,該方法比較適用于小功率的場合。
第二招是耗散——采用有源鉗位的方式,將回流的能量通過熱的形式散發出去。
第三招是轉換——這一招變化多端,可以是將能量回饋到電池端或者逆變入電網,當然也可以將多個負載母線并聯,使得回流的能量供給其它負載使用。
1 吸收——增加母線容值
這一招仿佛吸星大法般,將回流的能量通過母線電容進行吸收。但是,一個最重要的問題就是,多大的電容是合適的?(土豪可以不管那么多。)這里小編用一個比較簡化的方法進行求解。制動回流的能量是從電機軸端通過電機到驅動器,最后到母線上的,所以制動回流的最大功率可表示為:
Pmax = PmotorMBR?driver?motor(1)
其中Pmotor是電機運行的功率;MBR是電機制動瞬間的功率放大系數,這是考慮到制動瞬間的功率很大,所以在電機運行功率的基礎上進行放大,通常可選取160%;?driver是驅動器的效率,通常為98%;?motor是電機的效率,通常為90%。
在母線端,電容的吸收能量的能力肯定是要強過制動回流能量的,這才能夠將電壓穩在安全等級之下,所以根據電容功率公式可得:
0.5C(Uclamp - UBSB)2≧ Pmax(2)
其中C為電容容值;Uclamp為所需的鉗位電壓,母線電壓不能超過該鉗位電壓;UBSB為電機正常工作時的母線電壓。將式(2)進行變換可得所需電容的容值選取范圍:
C ≧ 2Pmax / (Uclamp - UBSB)2 (3)
2耗散——有源鉗位
對于大功率系統,由于制動時回流的能量更多,導致制動瞬間母線電壓會被升高更多,因此即時地將回流的能量消耗掉才是較為有利于系統的解決方法。如圖2,可以采用有源鉗位電路將制動回流能量的消耗,從而達到降低母線電壓的作用,這種方法在伺服系統中經常被使用。
當母線電壓上升使得采樣電壓超過參考值Ref時,有源鉗位電路中的MOSFET開通并將能量消耗在剎車電阻上。對于剎車電阻的選取,一般要考慮兩點:
① 在制動瞬間,回流能量所帶來的母線電壓升高是否能夠被快速地抑制掉,這和電阻的阻值有關,通常為幾歐至幾十歐。
② 由于制動回流的能量是通過剎車電阻轉換為熱能散發出去的,所以剎車電阻的額定功率要符合散熱的要求。對于實際的選擇,可能還得結合整個系統的應用工況和功率大小,此處就不再繼續展開了。
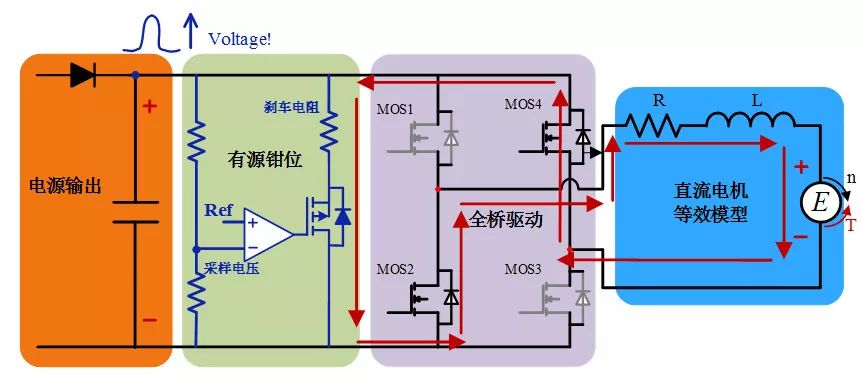
圖2:有源鉗位電路耗散能量
這一招有幾種變招,可以根據實際情況進行使用:如果整個系統中是采用電池進行供電的,那么回流的能量將會被饋入電池端;如果整個系統是一個電網的系統,可以通過逆變將能量饋入電網;如果整個系統是母線上并聯了多個負載的系統,如圖3所示(此處是電機負載),并且多個電機進行工作時不會同時運行在制動狀態,那么回流的能量就能夠被其余正在運行的負載利用起來,簡單實惠。
3 轉換——回饋能量
這一招有幾種變招,可以根據實際情況進行使用:如果整個系統中是采用電池進行供電的,那么回流的能量將會被饋入電池端;如果整個系統是一個電網的系統,可以通過逆變將能量饋入電網;如果整個系統是母線上并聯了多個負載的系統,如圖3所示(此處是電機負載),并且多個電機進行工作時不會同時運行在制動狀態,那么回流的能量就能夠被其余正在運行的負載利用起來,簡單實惠。
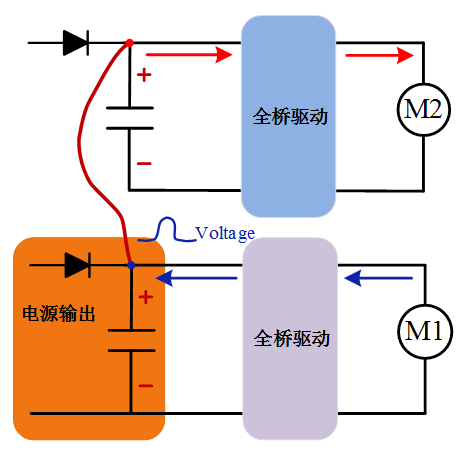
圖3:母線并聯系統
-
驅動器
+關注
關注
53文章
8263瀏覽量
146702 -
直流電機
+關注
關注
36文章
1710瀏覽量
70290
發布評論請先 登錄
相關推薦
汽車制動系統原理解析 如何檢查汽車制動系統
制動斬波器的工作原理 EAK制動斬波電阻器






 工商網監
工商網監
評論