 怎樣用PWM控制步進電機
怎樣用PWM控制步進電機
步驟1:接線和連接
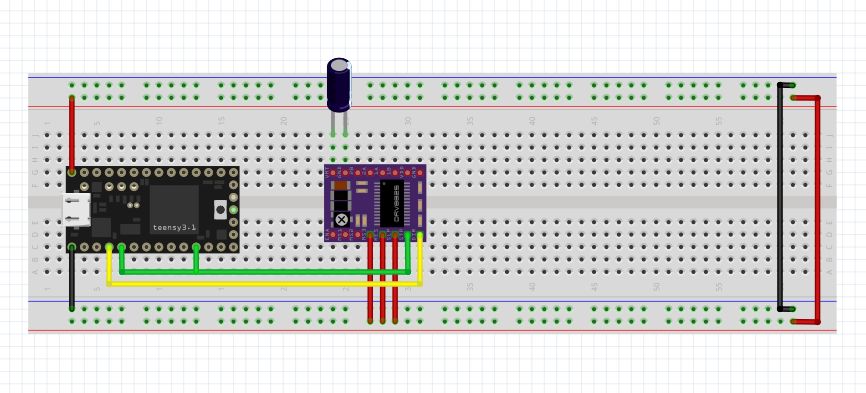
首先將焊頭連接到DRV8825板和Teensy,然后將它們放在面包板上。 (實際上最容易焊接這些標題,而電路板已 在面包板上,但按您喜歡的順序工作!)
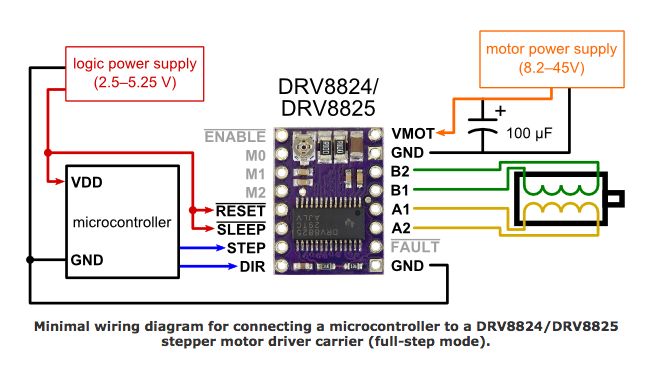
我們將連接步進驅動器,就像Pololu產品頁面中的圖表一樣(也包含在下圖中)。
VMOT 和 GND 之間將有一個100uF電容,并連接到能夠提供至少2A的12V臺式電源。
將 ~RESET 和 ~SLEEP 引腳連接到teensy的5V電壓軌保持高電平。
步進器本身將連接到 A1,A2,B1 和 B2。
將步進器設置為1/16步通過將 M2 拉高并允許 M0 和 M1 浮動來實現模式。
驅動程序的 GND 引腳將連接到teensy GND。
teensy的引腳2將連接到驅動程序的 DIR 引腳。
并且teensy的引腳3將連接到驅動程序的 STEP 引腳。
teensy將有一個額外的連接:引腳9將是連接到引腳3.這將允許teensy通過引腳更改中斷計數脈沖。
還要確保將DRV8825的限流電阻設置為適當的值,如產品頁面所述。
第2步:編碼!
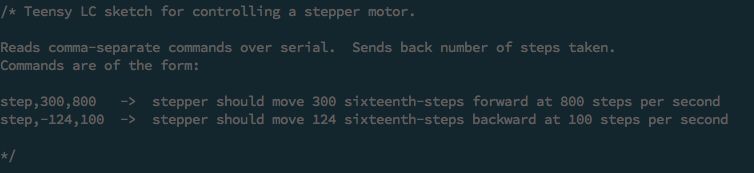
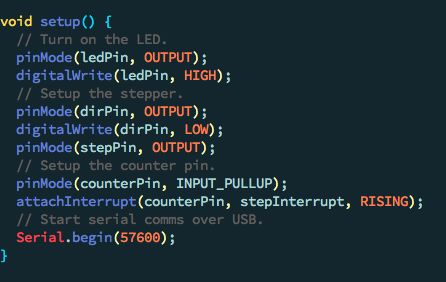
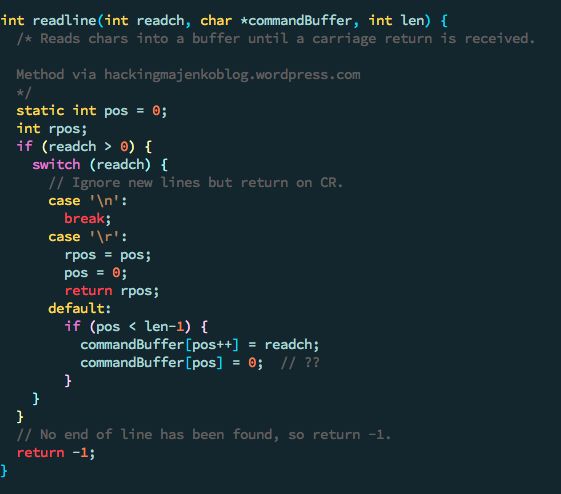

我用teensyduino寫了一個類似arduino的草圖來控制步進電機。按照此處的teensyduino設置步驟正確設置編碼環境。
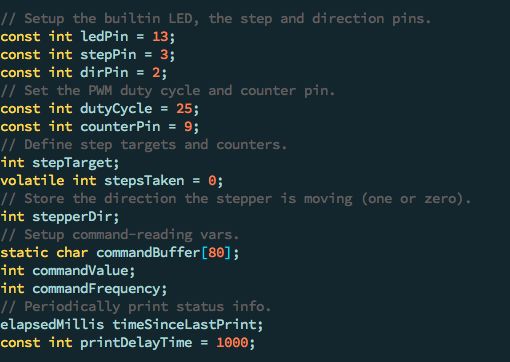
該代碼允許我們從終端發送命令來控制步進器的位置。完整的草圖發布在這里。下面的每張圖片都會細分代碼的一部分。還有一個控制器正在運行的快速演示!
第3步:接下來是什么。.
接下來可以嘗試的一些事情:
添加限位開關以控制步進器行程的最大和最小范圍
使用加速實驗以快速加速步進
嘗試不同的微步進值 - DRV8825支持完整步長至1/32微步
-
PWM
+關注
關注
114文章
5186瀏覽量
213937 -
步進電機
+關注
關注
150文章
3111瀏覽量
147486
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論