") 如何制作一個Android控制的機器人
如何制作一個Android控制的機器人
第1步:需要的東西
1.arduino nano
什么是Arduino?
Arduino是一個基于易用硬件和軟件的開源電子平臺。 Arduino板能夠讀取輸入 - 傳感器上的燈光,按鈕上的手指或Twitter消息 - 并將其轉(zhuǎn)換為輸出 - 激活電機,打開LED,在線發(fā)布內(nèi)容。您可以通過向板上的微控制器發(fā)送一組指令來告訴您的電路板該做什么。
Arduino編程語言(基于連線)和Arduino軟件(IDE),基于Processing。
多年來,Arduino一直是成千上萬項目的大腦,從日常用品到復(fù)雜的科學(xué)儀器。全世界的制造商社區(qū) - 學(xué)生,業(yè)余愛好者,藝術(shù)家,程序員和專業(yè)人士 - 聚集在這個開源平臺周圍,他們的貢獻增加了大量可訪問的知識,這對新手和專家都很有幫助。
Arduino出生于Ivrea交互設(shè)計研究所,作為快速原型制作的簡易工具,面向沒有電子和編程背景的學(xué)生。一旦它到達更廣泛的社區(qū),Arduino板就開始改變以適應(yīng)新的需求和挑戰(zhàn),將其產(chǎn)品從簡單的8位板轉(zhuǎn)變?yōu)?a href="http://www.xsypw.cn/tags/iot/" target="_blank">IOT應(yīng)用,可穿戴設(shè)備,3D打印和嵌入式環(huán)境的產(chǎn)品。所有Arduino板都是完全開源的,使用戶能夠獨立構(gòu)建它們并最終使它們適應(yīng)其特定需求。該軟件也是開源的,并且通過全球用戶的貢獻而不斷增長。
Atmega328
Atmel基于8位AVR RISC的微控制器結(jié)合了32 KB ISP閃存和讀寫能力,1 KB EEPROM,2 KB SRAM,23通用I/O線,32個通用工作寄存器,3個帶比較模式的靈活定時器/計數(shù)器,內(nèi)部和外部中斷,串行可編程USART,面向字節(jié)的2線串行接口,SPI串行端口,6通道10位A/D轉(zhuǎn)換器(采用TQFP和QFN/MLF封裝的8通道),帶內(nèi)部振蕩器的可編程看門狗定時器和5種軟件可選擇的省電模式。器件工作電壓
在1.8-5.5伏之間。該設(shè)備的吞吐量接近每MIPS 1 MIPS。
2.bluetooth模塊
HC-05模塊是一款易于使用的藍牙SPP(Serial Port
Protocol)模塊,設(shè)計用于透明無線串行連接設(shè)置。
串口藍牙模塊是完全合格的藍牙V2.0 + EDR(增強型數(shù)據(jù)速率)3Mbps調(diào)制,具有完整的2.4GHz無線電收發(fā)器和基帶。它采用CSR Bluecore 04-External單芯片藍牙系統(tǒng),采用CMOS技術(shù)和AFH(自適應(yīng)跳頻功能)。它的占地面積小至12.7mmx27mm。希望它能簡化您的整體設(shè)計/開發(fā)周期。
硬件特性
?典型的-80dBm靈敏度
?射頻發(fā)射功率高達+ 4dBm
?低功耗1.8V工作,1.8至3.6VI/O
?PIO控制
?具有可編程波特率的UART接口
?帶集成天線
?帶邊緣連接器
軟件功能
?默認波特率:38400,數(shù)據(jù)位:8,停止位:1,奇偶校驗:無奇偶校驗,數(shù)據(jù)控制:有。
支持的波特率:9600,19200,38400,57600,115200,230400,460800。
?鑒于PIO0中的脈沖上升,設(shè)備將斷開連接。
?狀態(tài)指令端口PIO1:低斷開,高連接;
?PIO10和PIO11可以分別連接到紅色和藍色LED。當主機和從機
配對時,紅色和藍色LED在間隔中閃爍1次/2秒,而僅斷開連接時藍色LED閃爍2次/秒。
?默認情況下,自動連接到最后一個設(shè)備。
?允許配對設(shè)備默認連接。
?自動配對PINCODE:默認為“0000”
?由于超出連接范圍而在斷開連接后30分鐘內(nèi)自動重新連接。
3.bo帶輪子的電機
齒輪電機通常用于商業(yè)應(yīng)用中,其中一件設(shè)備需要能夠施加大量的力才能移動非常重的物體。這些類型的設(shè)備的示例包括起重機或升降機杰克。
如果您曾經(jīng)見過一臺起重機,您已經(jīng)看到了齒輪電機工作原理的一個很好的例子。您可能已經(jīng)注意到,起重機可用于提升和移動非常重的物體。大多數(shù)起重機中使用的電動機是一種齒輪電動機,它使用減速的基本原理來增加扭矩或力。
起重機中使用的齒輪電機通常是特殊類型,它使用非常低的旋轉(zhuǎn)輸出速度來產(chǎn)生令人難以置信的扭矩。然而,起重機中使用的齒輪電動機的原理與示例電時鐘中使用的原理完全相同。通過一系列大齒輪減小轉(zhuǎn)子的輸出速度,直到最終齒輪的旋轉(zhuǎn)RPM速度非常低。低轉(zhuǎn)速有助于產(chǎn)生大量的力,可用于提升和移動重物。
4.l298電機驅(qū)動器
L298是一個集成的單片電路采用15引腳的Multiwatt和PowerSO20封裝。它是一款高電壓,大電流雙全橋驅(qū)動器,設(shè)計用于接受標準TTL邏輯電平并驅(qū)動感性負載,如繼電器,螺線管,直流和步進電機。提供兩個使能輸入,以獨立于輸入信號啟用或禁用器件。每個橋的下晶體管的發(fā)射極連接在一起,相應(yīng)的外部端子可用于連接外部傳感電阻。提供額外的電源輸入,以便邏輯以較低的電壓工作。
主要特性
?運行供電電壓高達46V
?低飽和電壓
?總直流電流高達4A
?邏輯“0”輸入電壓高達1.5 V(高噪聲抗擾度)
?過溫保護
5.18650 * 2電池
穩(wěn)定的直流電源對于電子系統(tǒng)的正常工作是必不可少的。所需的直流電源由兩節(jié)18650鋰離子2500mah電池獲得。但微控制器需要5v才能正常工作。..。..所以我們增加了一個5v穩(wěn)壓器。這是lm7805使用的。
6.acrylic sheet
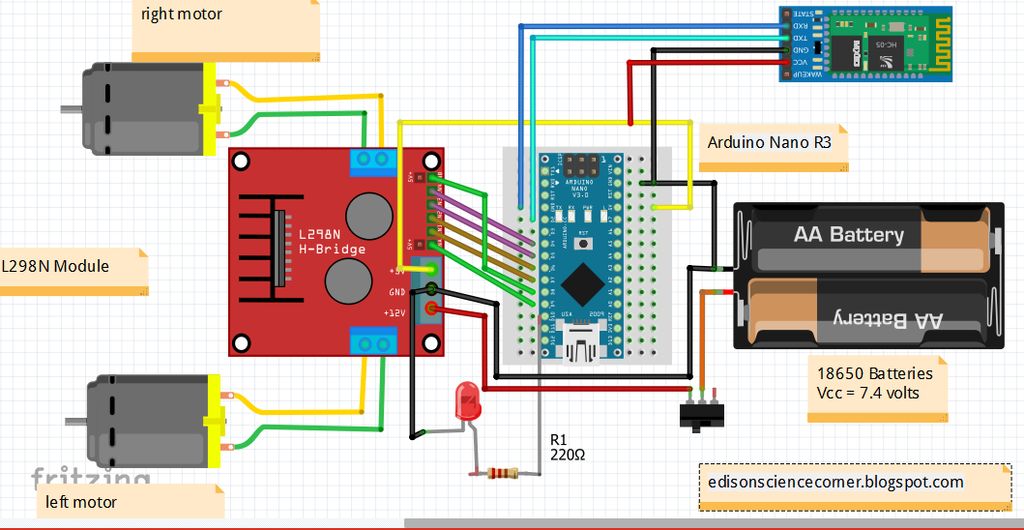
第2步:電路圖

步驟3:Pcb
點板焊接
步驟4:追逐制作
我用丙烯酸來追逐
第5步:應(yīng)用
REMOTEXY
RemoteXY是制作和使用移動圖形用戶界面的簡便方法,可通過智能手機或平板電腦控制控制器板。該系統(tǒng)包括:
·控制器板的移動圖形界面編輯器,位于站點remotexy.com
·移動應(yīng)用程序RemoteXY,允許連接到控制器并通過控制它圖形界面。下載應(yīng)用程序。
·特色功能:
接口結(jié)構(gòu)存儲在控制器中。連接后,無法與服務(wù)器交互以下載界面。接口結(jié)構(gòu)從控制器下載到移動應(yīng)用程序。
一個移動應(yīng)用程序可以管理您的所有設(shè)備。設(shè)備數(shù)量不受限制。
·控制器與移動設(shè)備之間的連接使用:
藍牙;
WiFi客戶端和接入點;
以太網(wǎng)的IP或URL;
互聯(lián)網(wǎng)從任何地方通過云服務(wù)器。
·源代碼生成器支持下一個控制器:
Arduino UNO,Arduino MEGA,Arduino Leonardo,Arduino Pro Mini,Arduino Nano,Arduino MICRO;
WeMos D1,WeMos D1 R2,WeMos D1 mini;
NodeMCU V2,NodeMCU V3;
TheAirBoard;
ChipKIT UNO32,ChipKIT uC32,ChipKIT Max32;
·支持的通信模塊:
藍牙HC-05,HC -06或兼容;
WiFi ESP8266;
Ethernet Shield W5100;
·支持的IDE:
Arduino IDE;
FLProg IDE;
MPIDE;
·支持的移動操作系統(tǒng):
·RemoteXY是制作獨特圖形界面來控制微控制器設(shè)備的簡便方法例如,通過移動應(yīng)用程序,Arduino。
·RemoteXY允許:
·開發(fā)任何圖形管理界面,使用控件,顯示和裝飾元素的任意組合。您可以為任何任務(wù)開發(fā)圖形
接口,使用在線編輯器將元素放在屏幕上。在線編輯器發(fā)布在remotexy.com網(wǎng)站上。
·在開發(fā)圖形界面后,您將獲得實現(xiàn)界面的微控制器的源代碼。源代碼提供了程序與控件和顯示之間交互的結(jié)構(gòu)。因此,您可以輕松地將控制系統(tǒng)集成到您正在開發(fā)設(shè)備的任務(wù)中。
·使用帶有圖形界面的智能手機或平板電腦管理微控制器設(shè)備。用于管理用過的移動應(yīng)用程序RemoteXY。
在定義的引腳開始時將用于控制電機。此外 - 引腳分為兩個陣列,分別是左和右電機。通過驅(qū)動芯片L298N控制每個電機需要使用三個信號:兩個離散的,電機的旋轉(zhuǎn)方向,一個模擬,確定轉(zhuǎn)速。計算這個引腳我們已經(jīng)參與了功能輪。該功能的輸入傳遞一個引腳陣列選擇電機的指針,旋轉(zhuǎn)速度為-100到100的有符號值。如果速度值為0,則電機關(guān)閉。
在預(yù)定的功能設(shè)置中,配置的是輸出引腳。對于模擬信號使用的引腳,可以作為PWM轉(zhuǎn)換器使用。這個引腳9和10,它們不需要在IDE Arduino中配置。
在程序調(diào)用處理程序RemoteXY庫的每次迭代中的預(yù)定函數(shù)循環(huán)中。此外還有LED控制,然后控制電機。對于電機控制,從RemoteXY的字段結(jié)構(gòu)中讀取操縱桿坐標X和Y.根據(jù)坐標是運算來計算每個電機的速度,并調(diào)用功能輪,設(shè)置電機的速度。這些計算在程序的每個循環(huán)中執(zhí)行,確保基于操縱桿坐標的電機連續(xù)控制計算引腳。
從PLAYSTORE下載REMOTEXY
步驟6 :PROGRAM
PROGRAM AND CIRCUIT
第7步:最終查看
HAPPY MAKING
第8步:
-
機器人
+關(guān)注
關(guān)注
211文章
28578瀏覽量
207795 -
Android
+關(guān)注
關(guān)注
12文章
3941瀏覽量
127674 -
Arduino
+關(guān)注
關(guān)注
188文章
6475瀏覽量
187469
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論