 3D打印機器人手臂的制作教程
3D打印機器人手臂的制作教程
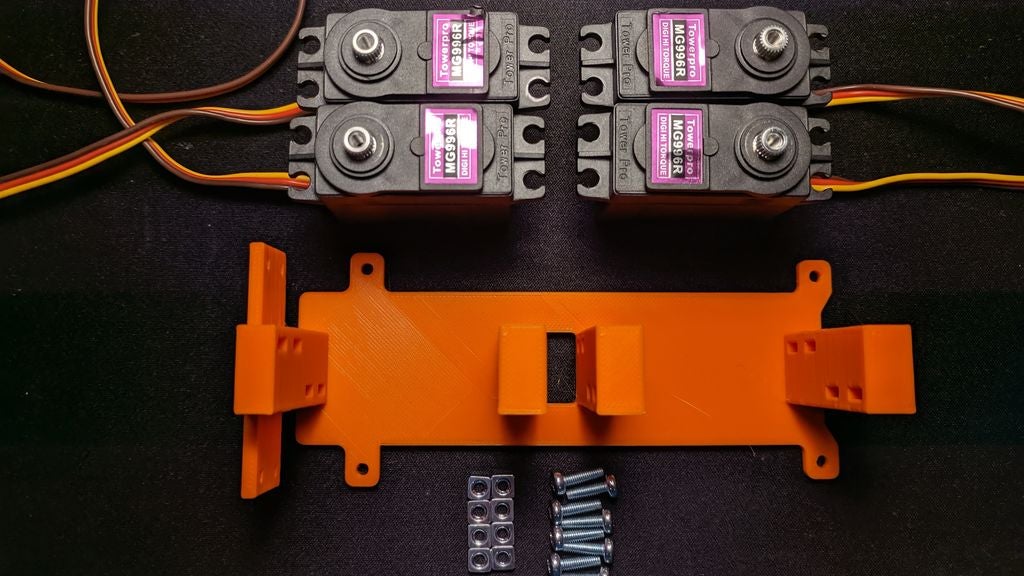
耗材:
以下產品是此Instructable中使用的項目。您可能會發現不同的變化,因為它們都是標準零件和電子元件。請注意,一些3D打印部件已針對這些項目量身定制,因此您的里程可能會有所不同。我已經在Thingiverse頁面上包含了Fusion360文件,以防您需要進行微調。
4x Servo Horn 25T
4x TowerPro MG996R 10kg伺服電話
8x 8mm M3沉頭螺釘 - 您可以使用較短的螺釘,但我使用8毫米長的螺釘,并且在前臂部件內部沒有間隙問題。
12x 10mm M3頭螺釘。在這個項目中可以使用20,但不是必需的。
12x M3方形螺母5.5x1.8mm
3毫米彈性尼龍/防震繩(5米)
MG90S微伺服帶伺服喇叭
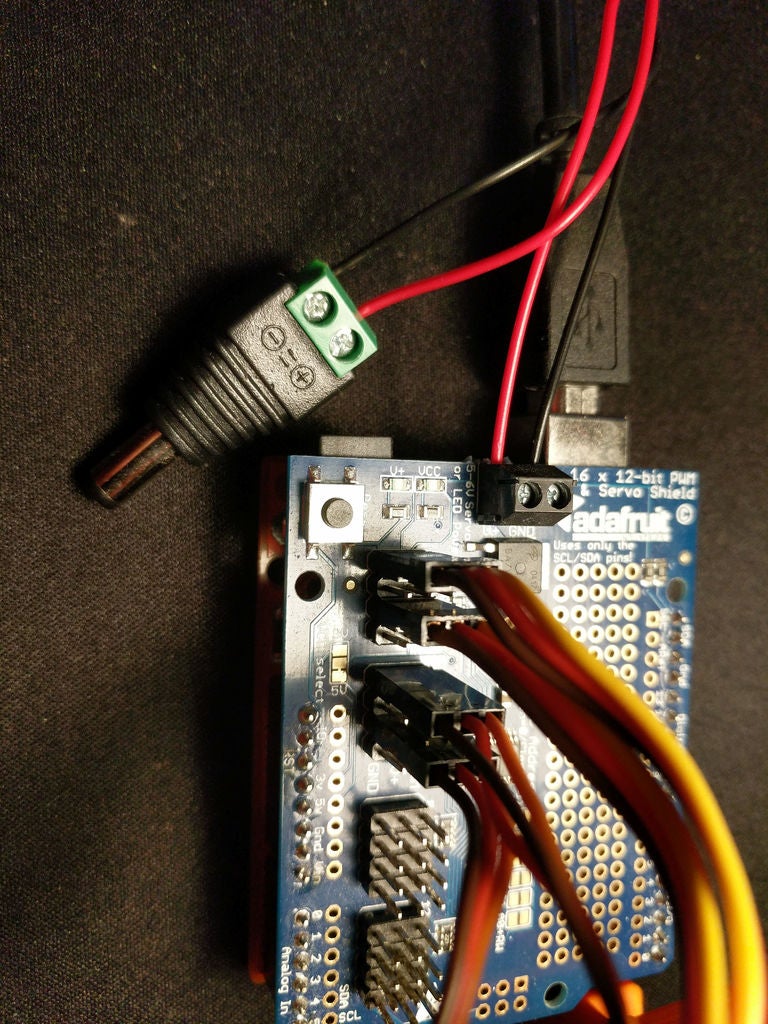
PWM/伺服控制器板
電池/電源~5 -6V
步驟1:準備伺服滑輪



《準備以下內容:
4x伺服滑輪(3D打印)
4x伺服喇叭
8x沉頭M3螺絲
將伺服喇叭穿過伺服滑輪上的孔,使齒形槽略微突出滑輪底座。
將兩個埋頭螺釘擰入滑輪和喇叭的孔中。
重復所有4個滑輪。
步驟2:保護舵機

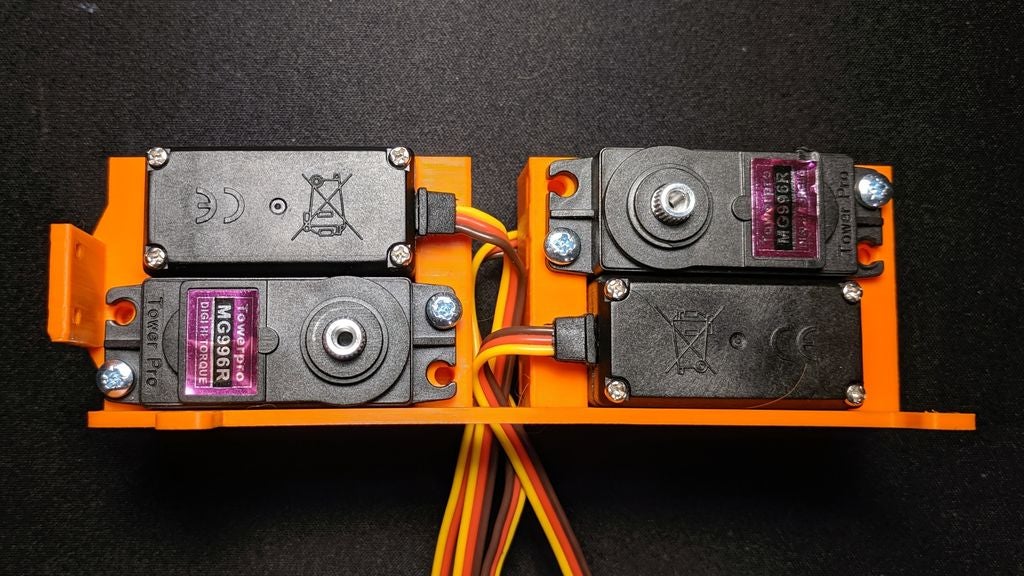
準備以下內容:
伺服支架(3D打印)
4x TowerPro MG996R 10kg伺服電機
8x(最小)10mm M3螺絲
8x(最小)M3方形螺母
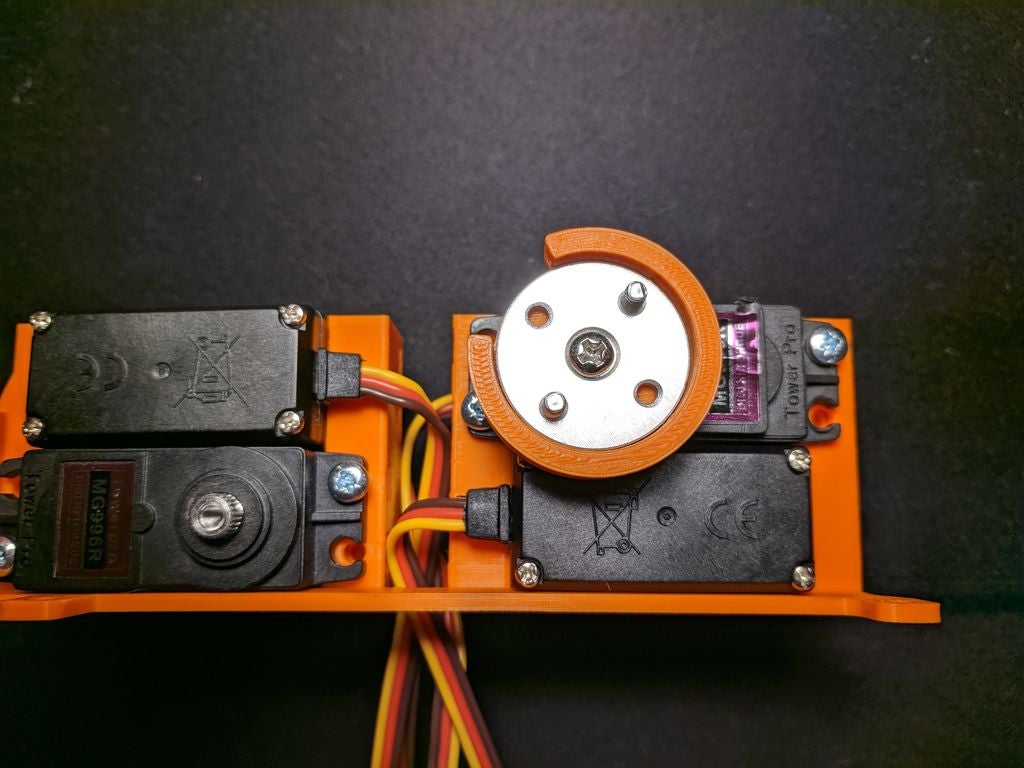
將方形螺母插入陷阱。您可能需要仔細定位它們以與伺服孔對齊。
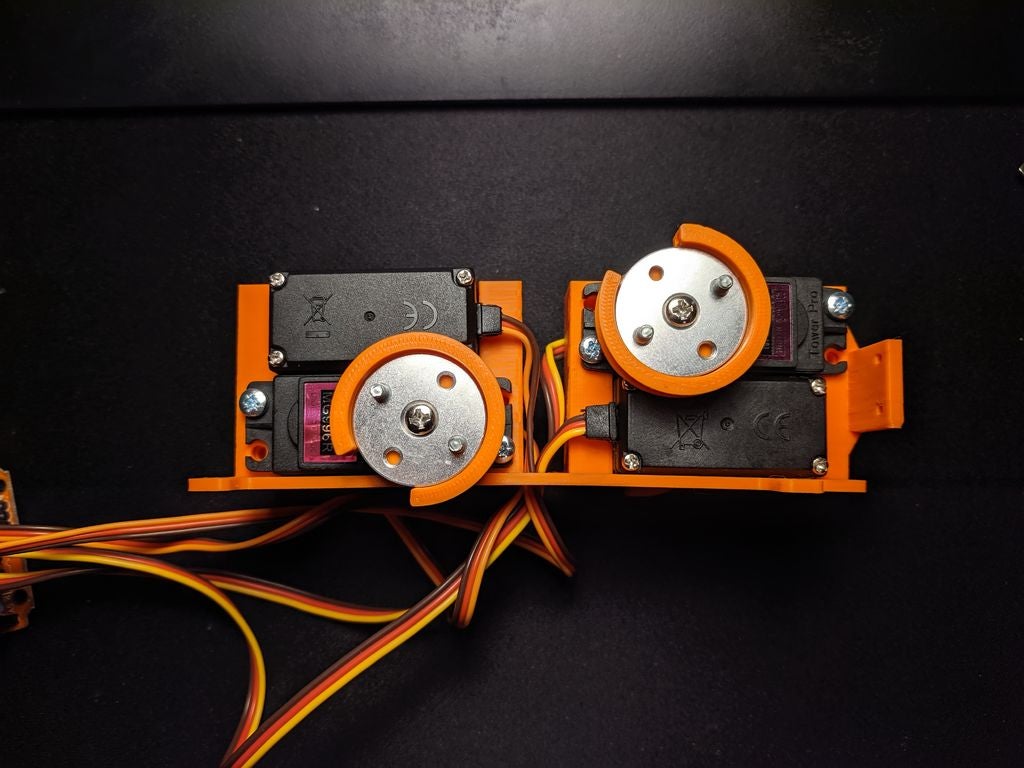
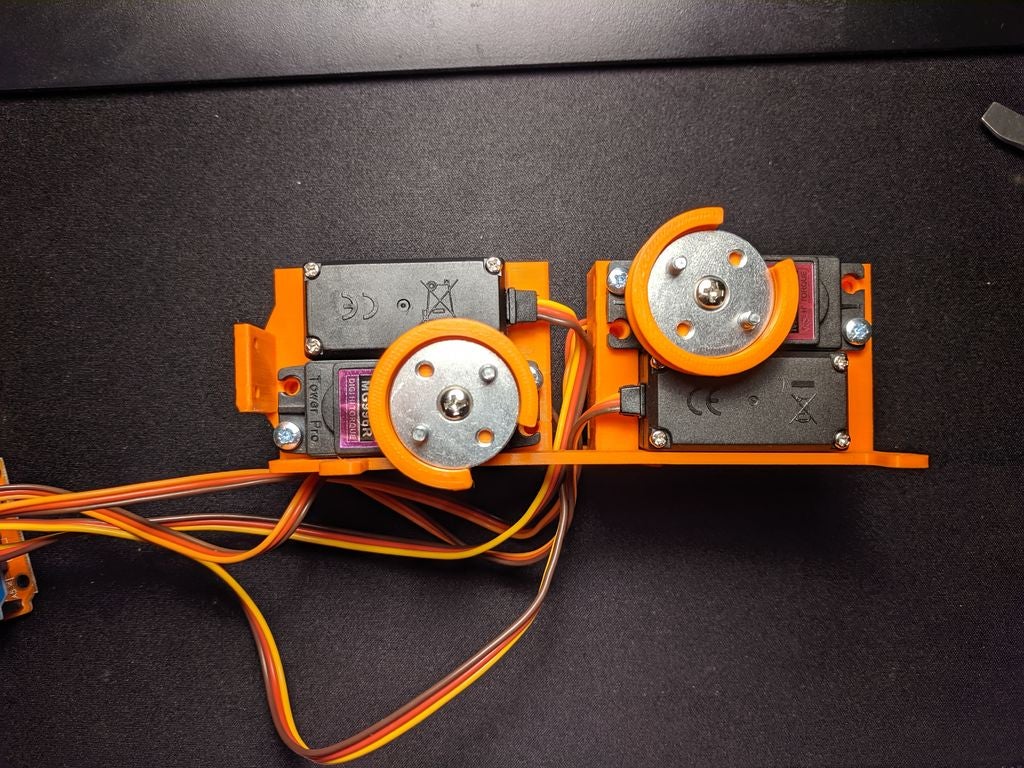
使用螺釘將伺服器固定到支架上。小心不要過度擰緊,只需將電機固定到位即可。您可以選擇使用支架上的所有孔,但這不是必需的。在圖片中,我每個伺服只使用了兩個。
對所有4個伺服器重復。方向很重要:確保25T齒輪軸更靠近支架的中心支柱。
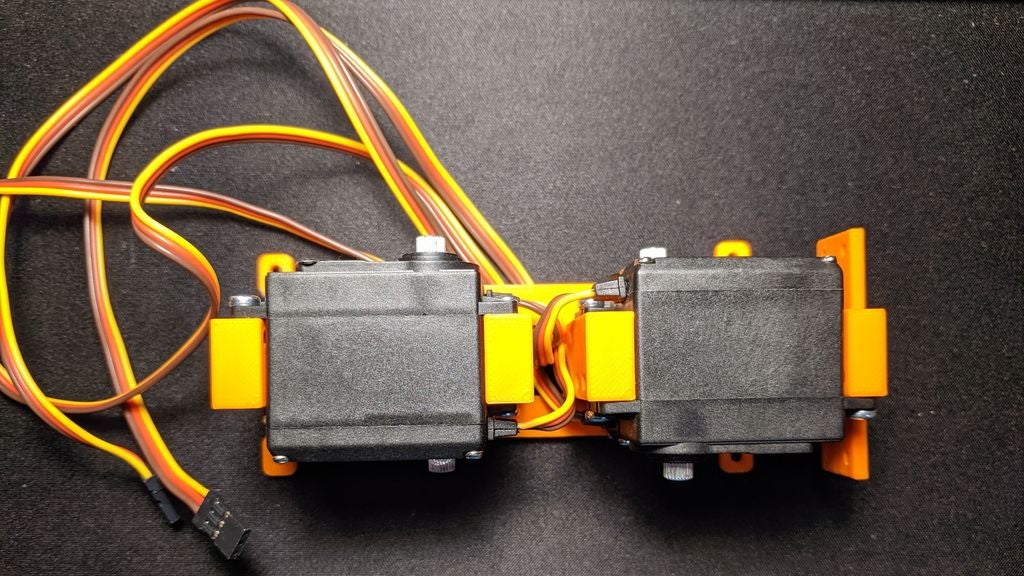
電纜管理很重要!將電纜穿過中心支柱之間的孔。它們將被引導穿過前臂外殼。
步驟3:將伺服滑輪添加到舵機
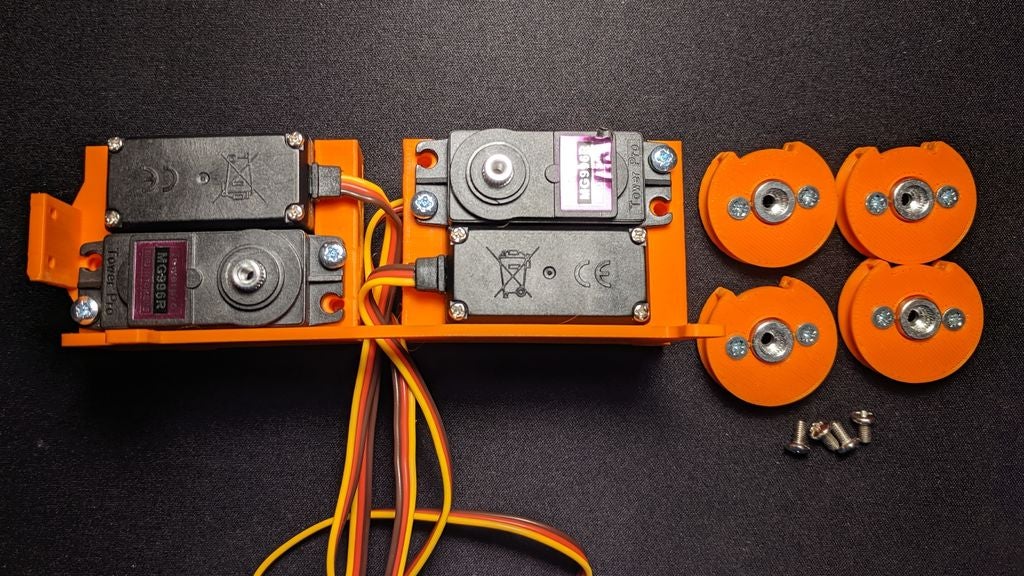

準備以下內容:
完成的伺服支架
4x完成的伺服滑輪
4x 4mm M3螺釘(通常隨伺服器一起提供)
將每個滑輪按到每個電機軸上。現在確切的方向并不重要 - 稍后你會改變它。
用螺絲固定滑輪。我的舵機隨附,但如果您需要單獨購買,請檢查您訂購的內容。
伺服裝配完成!
第4步:裝配手













準備以下:
Palm(3D打印)
手指(3D打印
彈性尼龍繩
MG90S Micro Servo
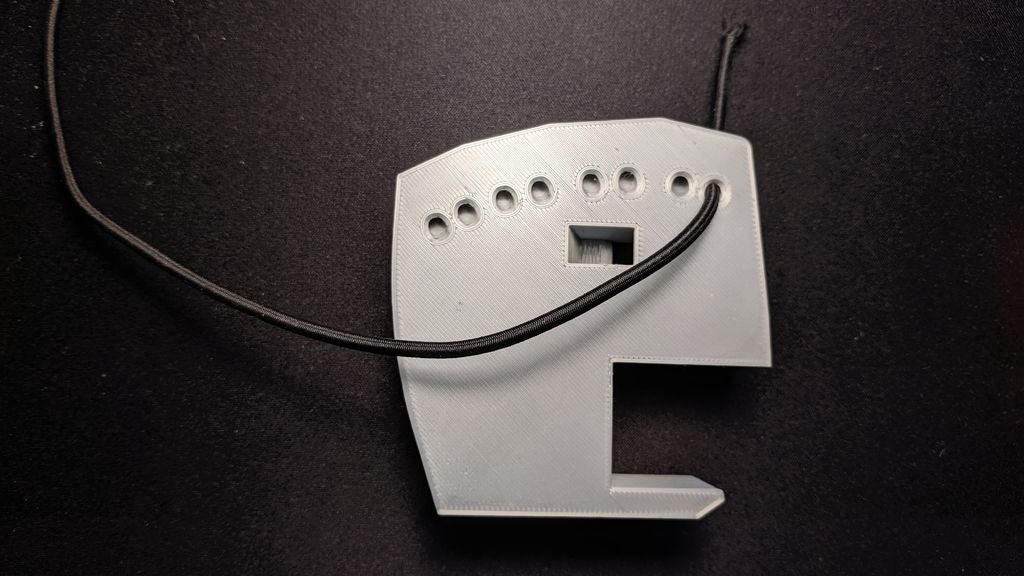
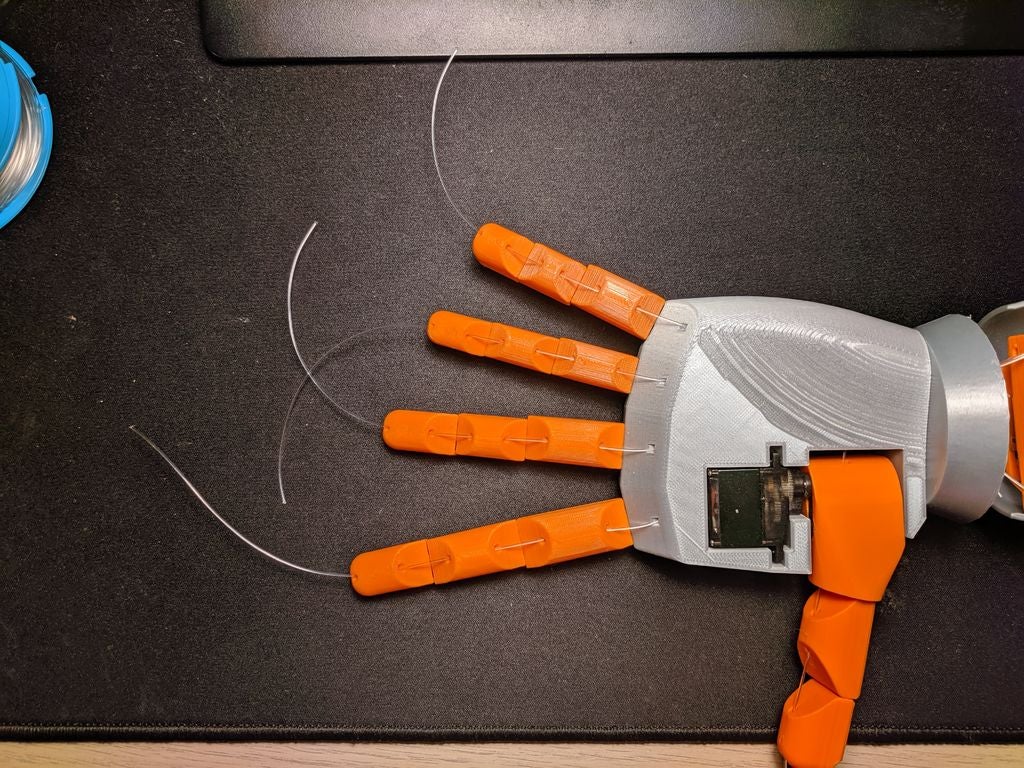
將尼龍繩的一端穿過手掌背面的一個孔,然后穿過相應手指上的孔。如果發現很難將繩子穿過由于磨損結束,請嘗試將其包裹在一些膠帶中,以使末端更順暢。
將尼龍重新放回自身,然后穿過手指的第二組孔,最后穿過另一個掌心孔。
擰緊尼龍并將繩子的兩端系在一起。試著彎曲手指并確保它快速向后拉直起來。如果不是,你需要將兩端緊密結合在一起。
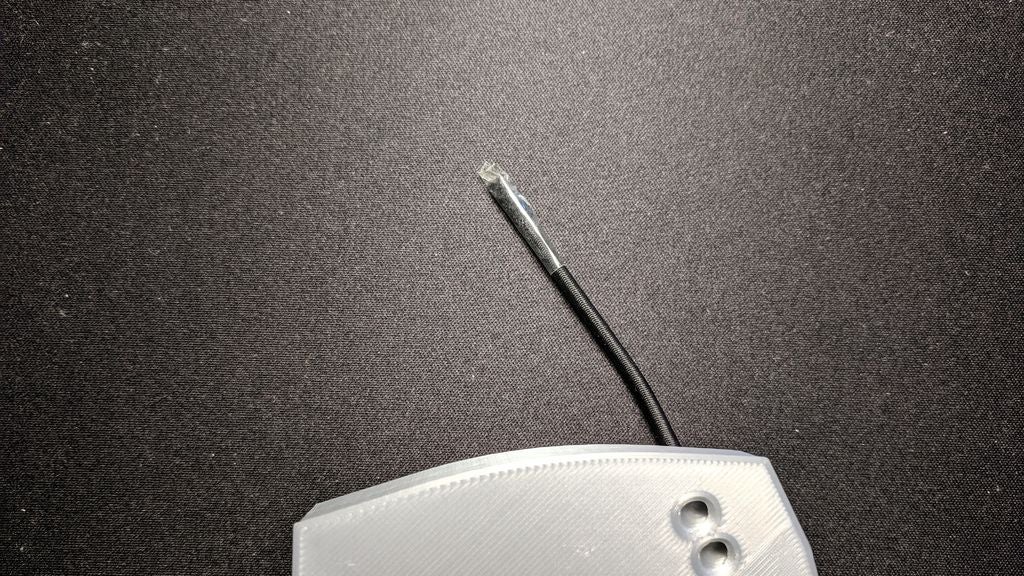
將繩索的末端切割成接近結。用烙鐵燒烤尼龍的末端以阻止它們磨損可能是個好主意,但這并不總是必要的。
對剩余的3個手指重復步驟1-4。雖然我已經使用所有不同的印刷手指進行了演示,但您可能更喜歡根據自己的需要混合搭配不同的長度/寬度。
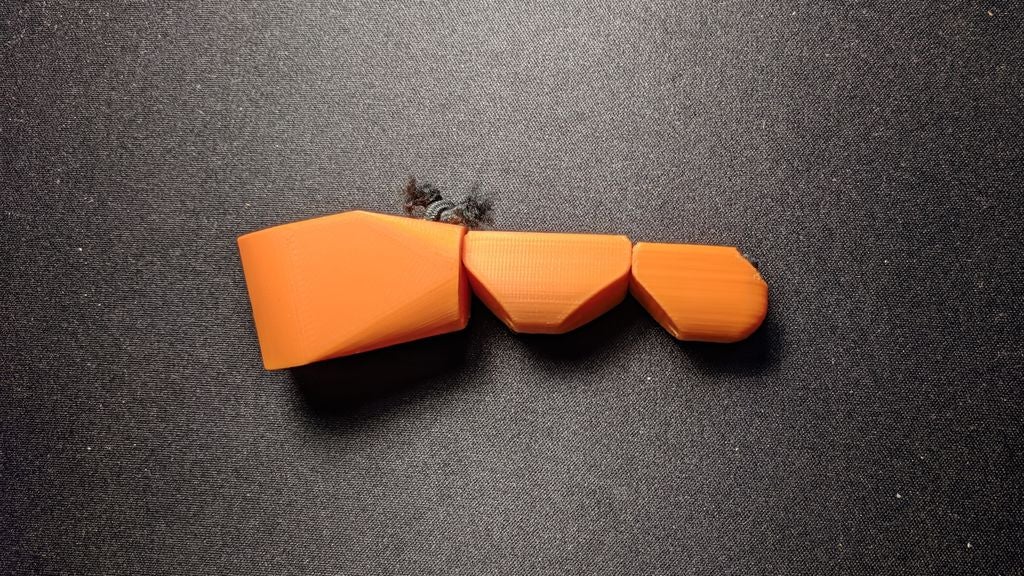
使用與上面相同的方法將Thumb綁定在一起。
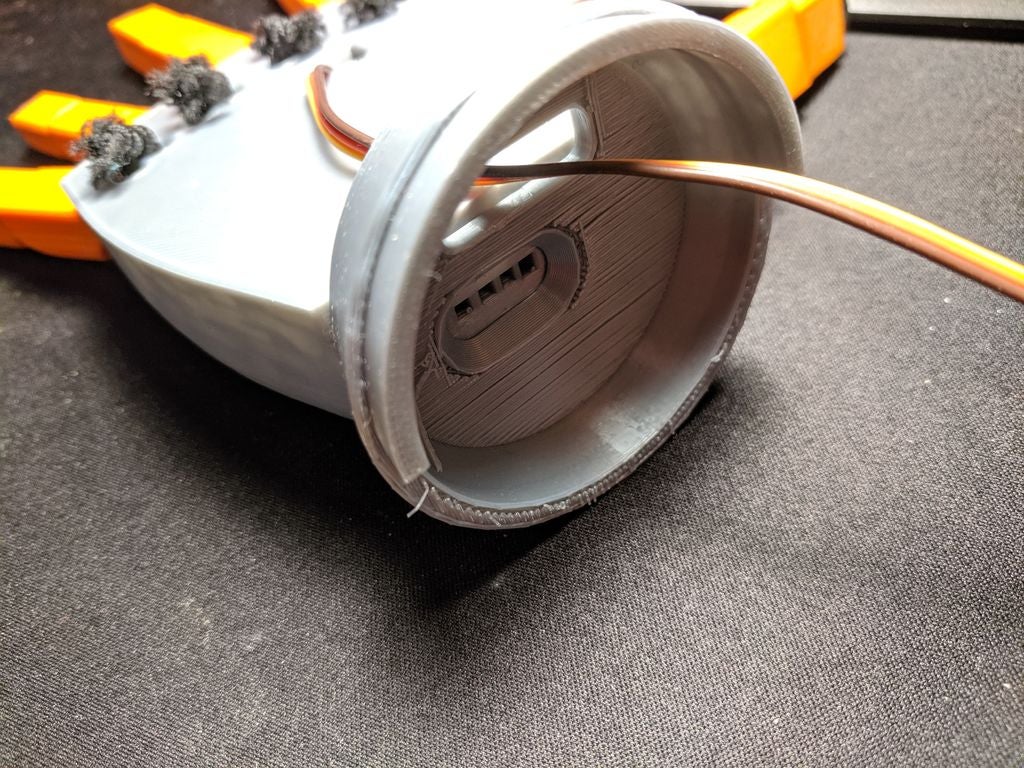
將Micro Servo(附帶伺服喇叭)安裝到拇指上。它應該是壓配合(盡量不要破壞電機),但一點膠水可能有助于將其保持在適當的位置。不用擔心,您可以使用拇指關節中的孔將電機從喇叭上擰下來取下電機。
將電纜穿過Palm中的孔,然后將電機推入插槽。 (您下載的設計可能與所示的設計略有不同,因為當您插入電機時,此設計會稍微捏住電纜。)
手完成!
步驟5:將手指連接到舵兵









準備以下內容:
持有人中的舵機
Constructed Palm
前臂(3D打印)
手腕(3D打印)
塑料膠
Arduino(或類似的微控制器) - 我使用了Arduino Uno。
伺服控制器板 - 我使用了Adafruit 16通道12位PWM/伺服防護罩
釣魚線
4 x M3x10mm螺絲
4 x M3方螺母
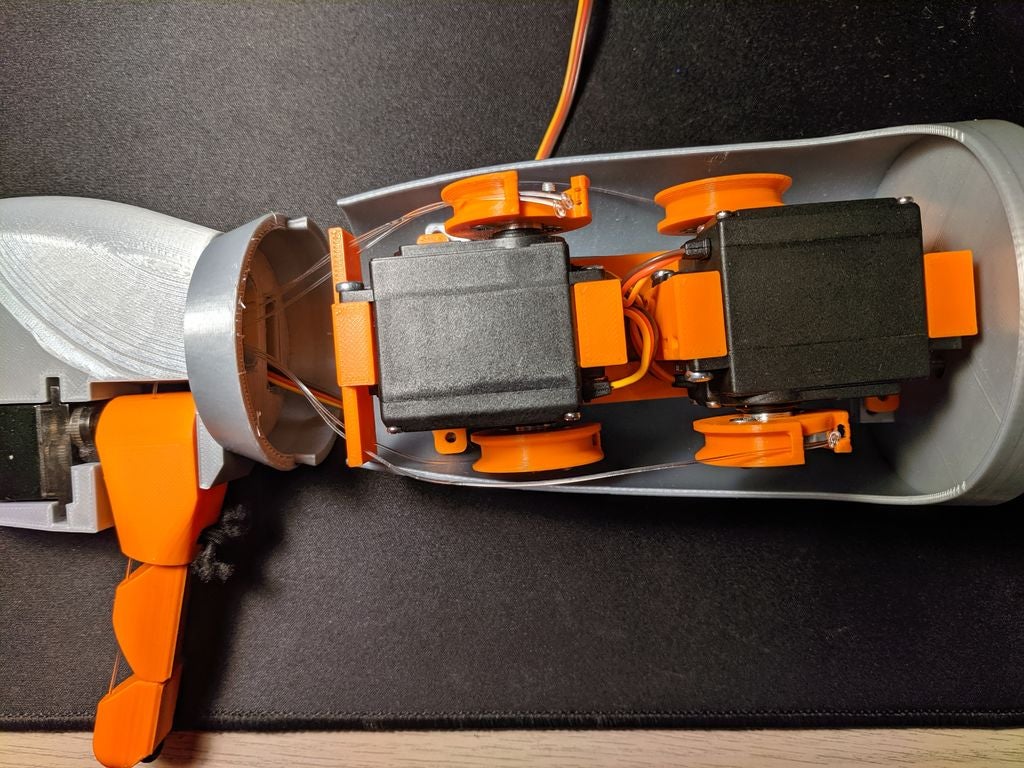
將伺服系統連接到伺服控制器板。選擇對您有意義的訂單。我將前伺服連接到端口0和2,后伺服連接到4和6.
從Gihub下載伺服校準項目文件。您很可能必須根據連接伺服系統的方式修改值,或者它們的編碼器范圍略有不同。你對這個階段負有責任,所以要小心不要讓它們超過轉彎的安全點。
運行程序,使所有伺服器都處于最前端位置。
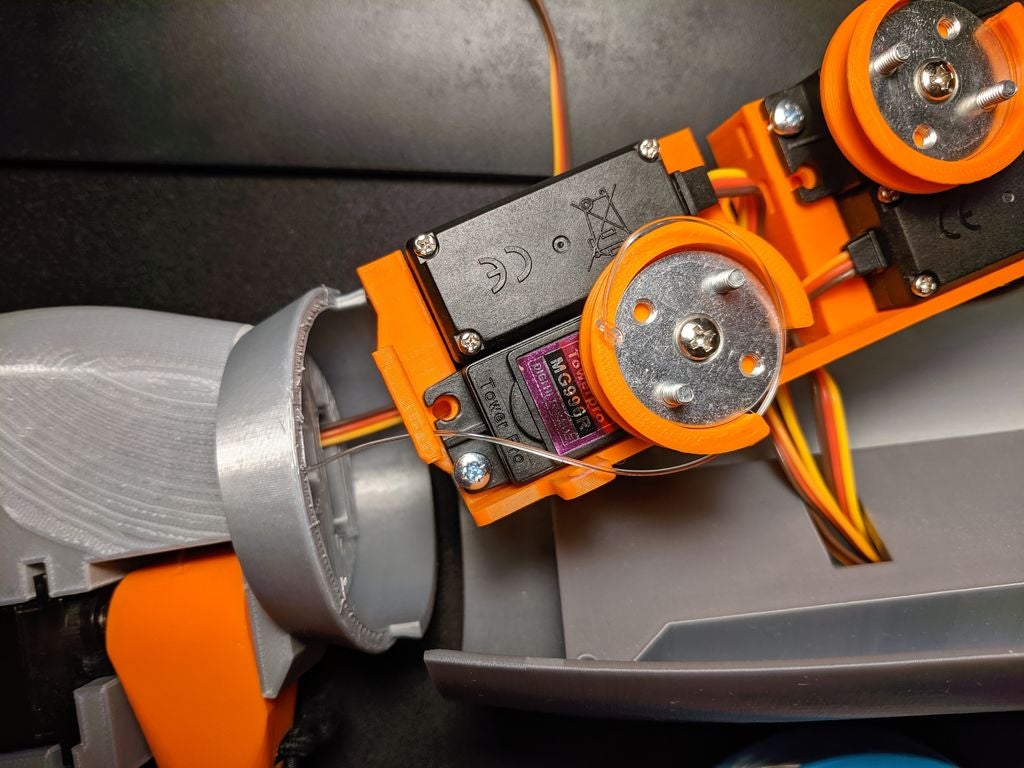
取下伺服喇叭并根據照片旋轉它們。這使它們處于通過釣線連接后拉回手指的最佳位置。通過向后旋轉伺服系統進行測試,它們應該如下圖所示結束。
注意如何連接伺服電纜。現在拔掉它們,這樣你就可以將電纜穿過前臂的布線,然后將它們連接到底部。如果可能,也將拇指伺服電纜穿過路徑(從前臂頂部)。
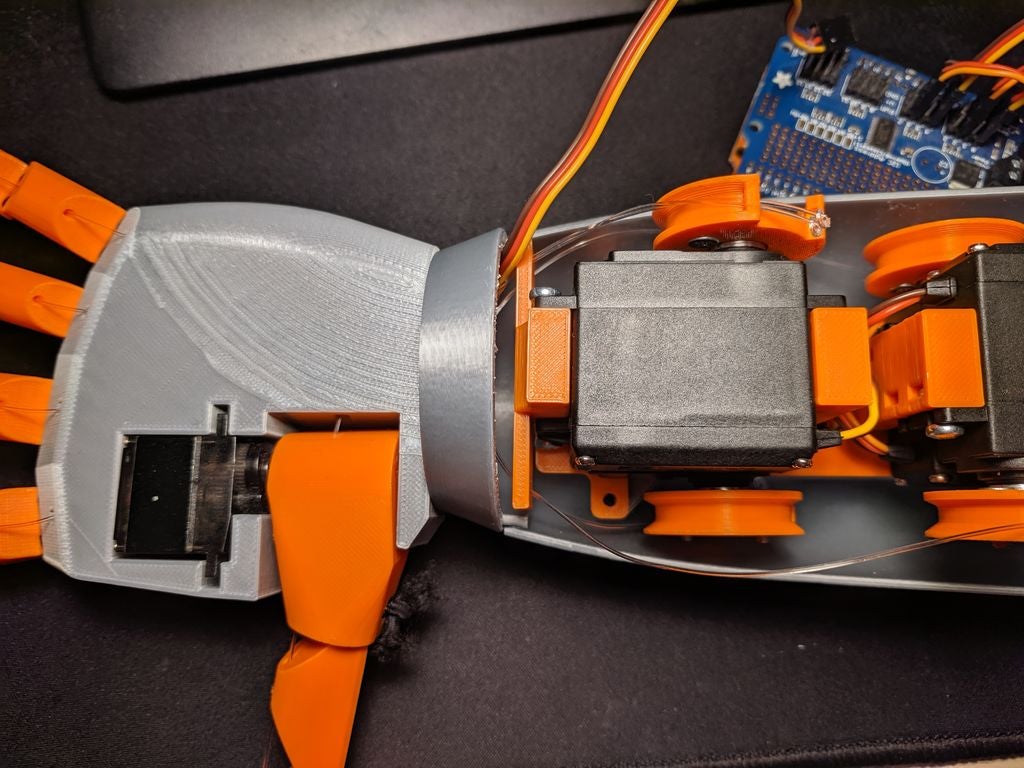
將手腕部分粘在手上。只有一個方向可以讓兩個插在一起。確保拇指馬達的電纜穿過手腕的較長插槽。
將釣魚線穿過手指,手掌,導腕和伺服導軌。然后將每條線穿過其中一個伺服喇叭。第四個和小指應該在同一個號角上。確保將線穿過,使其不會與任何其他線摩擦。
在每個喇叭上系一個結,讓手指末端的線松開。留下足夠的松弛度以便打結。
使用螺母陷阱中的螺釘和螺母將伺服支架固定到前臂上。
將手腕粘在前臂頂部。
在每根手指的尖端打結。您可能會發現釣魚線略微松弛,這是正常現象。要再次擰緊線,請取下伺服喇叭并將其旋轉離開手,直到教導線。然后將喇叭重新安裝到伺服系統上。
通過運行緊握拳頭的程序來測試手。
如果一切正常,您就準備好了!做得好!
第6步:完成
主要結構已經完成,你已經準備好玩你的新機器人!
花些時間了解您的電機,微控制器及其局限性。嘗試制作一些控制它的應用程序,也許是您所選語言的庫。
-
機器人
+關注
關注
211文章
28578瀏覽量
207776 -
3D打印
+關注
關注
26文章
3558瀏覽量
109339
發布評論請先 登錄
相關推薦
有源晶振在3D打印機應用方案

3D打印機優化:ARMxy嵌入式計算機的作用

應用在3D打印機的BD系列金屬連接器
Klipper固件的打印機可以插卡打印嗎?
2024年含直線電機3D打印機在內共出口182.9萬臺

3D打印汽車零部件建模設計3D打印服務

上海伯東工業級3D打印機為機器人的制造工藝帶來新變革
UltiMaker正式推出了工業級3D打印機—UltiMaker Factor 4


YXC晶振 32.768KHz石英振蕩器,封裝3225,應用于3D打印機
能入3D打印機法眼,BD系列工業級連接器究竟有哪些獨特之處?






 工商網監
工商網監
評論