 控制溫度常用方法
控制溫度常用方法
控制溫度常用方法
1、常規PID控制
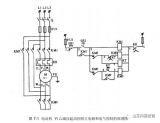
PID控制即比例、積分、微分控制,其結構簡單實用,常用于工業生產領域。原理如圖1。

圖1常見PID控制系統的原理框圖
明顯缺點是現場PID參數整定麻煩,易受外界干擾,對于滯后大的過程控制,調節時間過長。其控制算法需要預先建立模型,對系統動態特性的影響很難歸并到模型中。
在我國大多數PID調節器廠家生產的調節器均為常規PID控制算法。
2、模糊控制
模糊控制(FuzzyControl)是以模糊集合論、模糊語言變量及模糊邏輯推理為基礎的計算機控制。原理如圖2。

圖2模糊控制系統原理框圖
3、神經網絡控制
神經網絡控制采用數理模型的方法模擬生物神經細胞結構,用簡單處理單元連接形成各種復雜網絡,并采用誤差反向傳播算法(BP)。原理如圖3:
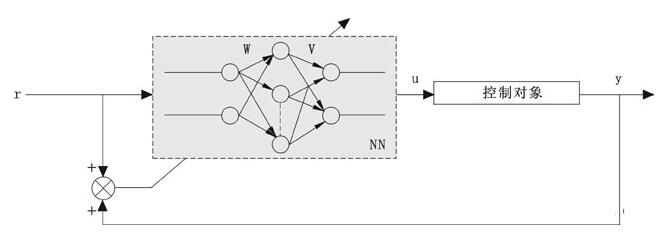
圖3神經網絡控制系統的原理框圖
4、Fuzzy-PID控制
模糊控制不需知道被控對象的精確模型,易于控制不確定對象和非線性對象。PID本質是線性控制。將模糊控制與PID結合多,以Fuzzy-PID混合控制為例,據給定值與測量值之偏差e選擇智能控制器,根據e的變化選擇控制方法,當|e|≤emin或|e|≥emax時,采用PID控制;當emin≤|e|≤emax時,采用Fuzzy控制。其結構框圖如圖4。

圖4Fuzzy-PID混合控制結構框圖
5、神經網絡PID控制
在PID控制的基礎上,加入神經網絡控制器,構成神經網絡PID控制器,如圖5。神經網絡控制器NNC是前饋控制器,通過對PID控制器的輸出進行學習,在線調整自己,目標是使反饋誤差e(t)或u(t)趨近于零,使自己逐漸在控制中占據主導地位,以減弱或最終消除反饋控制器的作用。
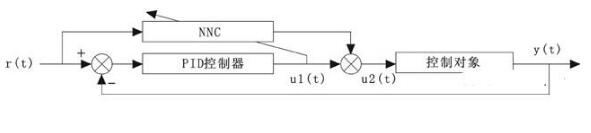
圖5神經網絡PID控制結構框圖
6、模糊神經網絡控制
將模糊邏輯與神經網絡結合,采用神經網絡模糊邏輯推理網絡模型和快速的自學習算法,通過網絡的離線訓練和在線自學習使控制器具有自調整、自學習和自適應能力,達到模糊智能控制。如圖6。
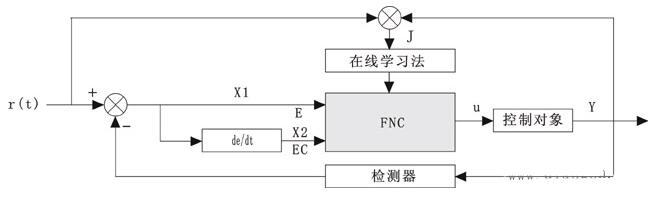
圖6模糊神經網絡控制系統結構圖
7、遺傳PID控制
遺傳PID控制是將控制器參數構成基因型,將性能指標構成相應的適應度,利用遺傳算法來整定控制器的最佳參數,不要求系統是否為連續可調,能否以顯式表示。基于遺傳算法的自適應PID控制的原理框圖如7。遺傳PID溫控系統將測量值與給定值進行比較,用遺傳算法來優化PID參數,然后將控制量輸出,實現將PID參數串接構成完整染色體,從而構成遺傳空間中的個體,過通過繁殖交叉和變異遺傳操作生成新一代群體,經過多次搜索獲得最大適應度值的個體。

圖7基于遺傳算法的自適應PID控制結構圖
8、廣義預測控制
預測控制(PredictiveControl)是基于模型的計算機控制算法。其預測模型有脈沖響應模型、階躍響應模型、CAMRMA模型和CARIMA模型。基于CARIMA模型的廣義預測控制(GPC)是一種新型計算機控制算法。
-
控制溫度
+關注
關注
0文章
3瀏覽量
10165
發布評論請先 登錄
相關推薦
單總線溫度傳感器的EDA控制方法
大滯后系統常用的控制方法
常用的解耦設計方法
一種智能化的氣流溫度控制方法
幾種常用的溫度傳感器應用和原理說明
DCR溫度補償的基本概念和電路實現的方法
基于CW32的PID溫度控制案例分享






 工商網監
工商網監
評論