") 如何制作一個(gè)機(jī)器人車
如何制作一個(gè)機(jī)器人車
步驟1:物料清單






您將需要以下物品:
任何材料的薄扁平物品如下任何一項(xiàng):
木板條
亞克力相框
手機(jī)殼(可在Dollar Tree *購買)
黑板
刨花板(Michaels提供*)
這可能需要一些冰棒支撐
角匾
門吊
仙女門(可在Dollar Tree *購買)
底板(兼容樂高)(可在Dollar Tree *購買)
牌匾(可在Michaels *)
木質(zhì)激光切割牌匾
木板
您可能有的任何其他薄款產(chǎn)品
《升i》 STEAMbot裸骨套件,該套件包含以下內(nèi)容:
STEAMbot控制器 - 帶BLE和雙電機(jī)控制器的Arduino兼容板
控制器支架 - 用于保存STEAMbot控制器
2直流電機(jī)和車輪
滾輪
帶電纜的超聲波傳感器
超聲波傳感器支架
4 AA電池座
泡沫安裝膠帶
熱膠槍和膠水(低溫首選)
小扁平螺絲刀
以下項(xiàng)目是可選的:
諸如此類的裝飾以個(gè)性化您的機(jī)器人
支持藍(lán)牙LE的移動(dòng)設(shè)備
使用Blockly進(jìn)行編程時(shí),請(qǐng)執(zhí)行下列任一操作**:
Chromebook(支持BLE)或
運(yùn)行Chrome瀏覽器的Mac電腦
使用Arduino IDE進(jìn)行編程
微型USB電纜
任何支持Arduino IDE和STM32插件的計(jì)算機(jī)。
*我在指定的商店購買了該商品,但我在他們的網(wǎng)站上找不到該商品。
**目前,運(yùn)行Chrome的Windows無效。我沒有嘗試任何Linux計(jì)算機(jī)。
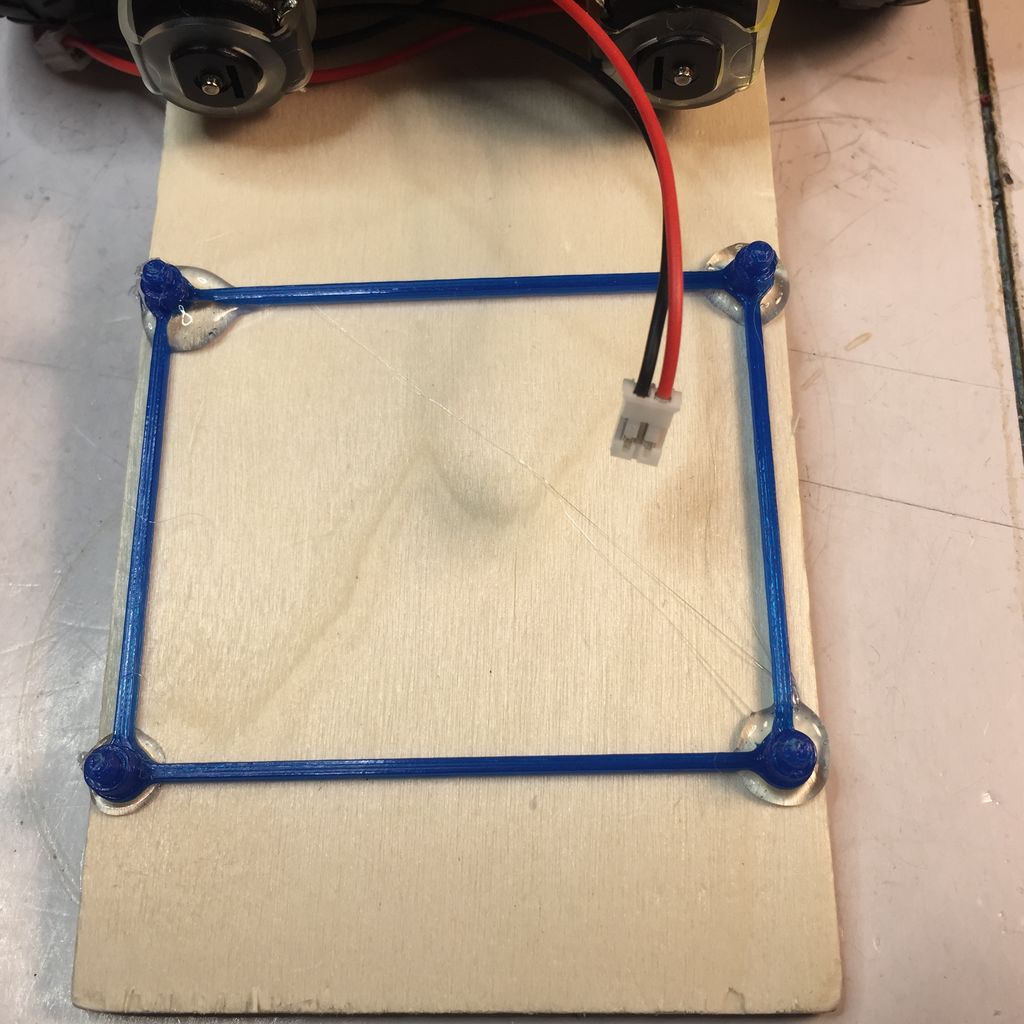
第2步:連接電機(jī)



此Instructable將使用木板條,但適用于材料清單中列出的任何薄扁平物品。
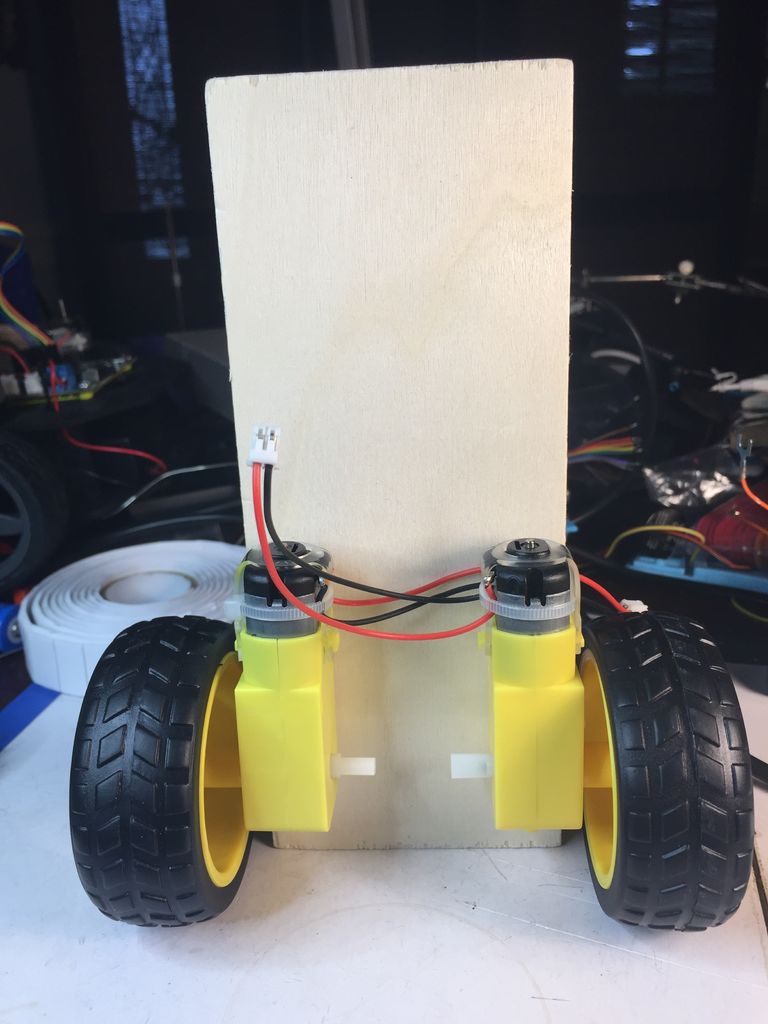
要安裝電機(jī),請(qǐng)執(zhí)行以下操作:
將木板放在桌子上。
從右側(cè)電機(jī)的泡沫安裝膠帶上取下保護(hù)紙(雖然它出現(xiàn)在照片的左側(cè),盡管它實(shí)際上是正確的電機(jī))。確保電線朝向扁平物品的中間。
將右側(cè)電機(jī)與扁平物品對(duì)齊,然后將電機(jī)泡沫膠帶壓在扁平物品上。
對(duì)左側(cè)電機(jī)重復(fù)步驟2和3。您的機(jī)器人應(yīng)該與上一張照片類似。
步驟3:連接電池座

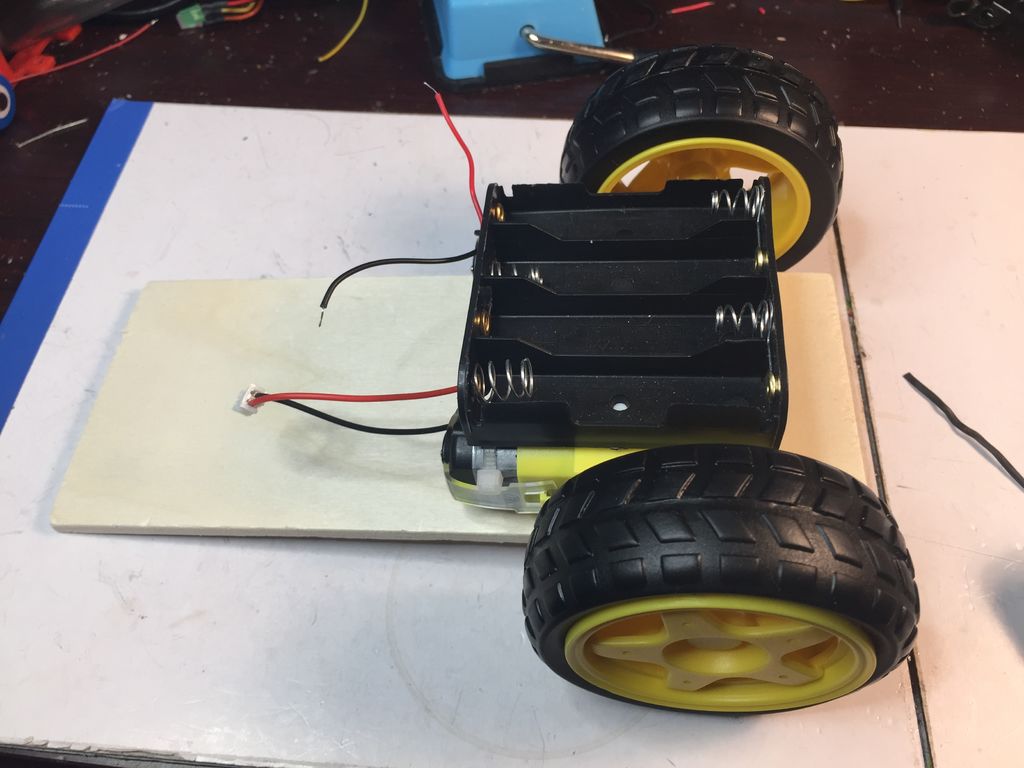
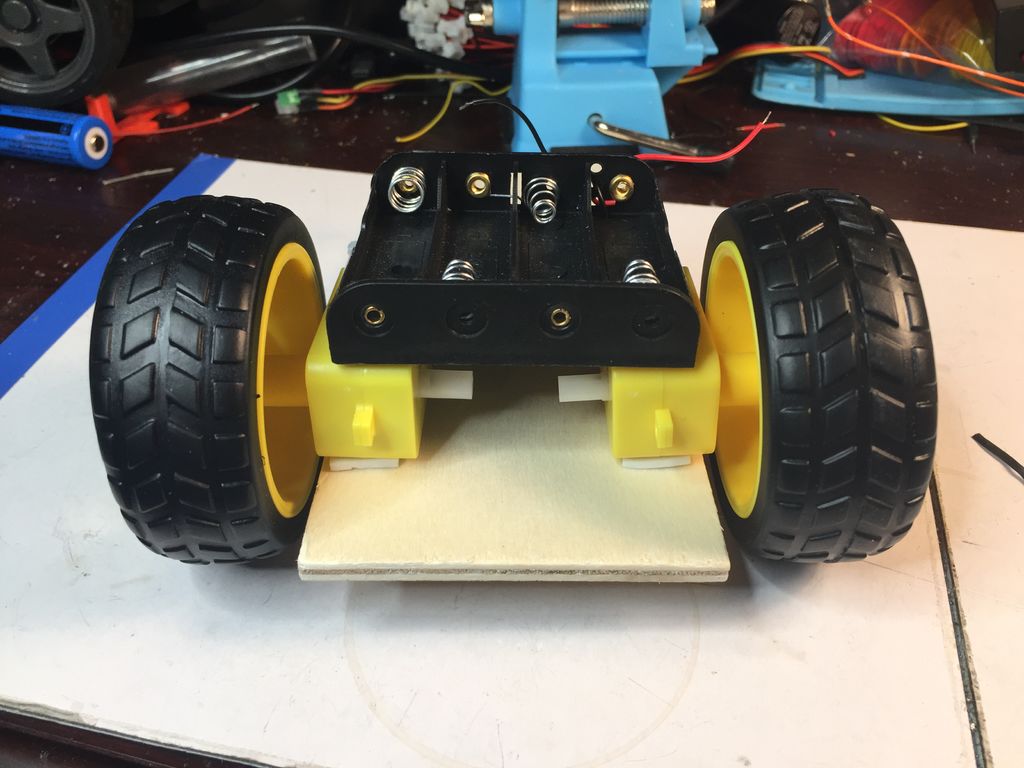
要安裝電池座,請(qǐng)執(zhí)行以下操作:
從電池座的泡沫安裝膠帶上取下保護(hù)紙。
小心地將電池座對(duì)準(zhǔn)電機(jī)并將電池座壓在電機(jī)上。
注意,根據(jù)扁平物品的寬度,電池座可以放在適合的位置在電機(jī)的軸之間。如果電池座安裝在電機(jī)之間而不是軸之間,則切割一塊適當(dāng)大小的紙板或巨型工藝棒以支撐電池座并將其熱粘到電機(jī)上。然后將電池座安裝在紙板上。
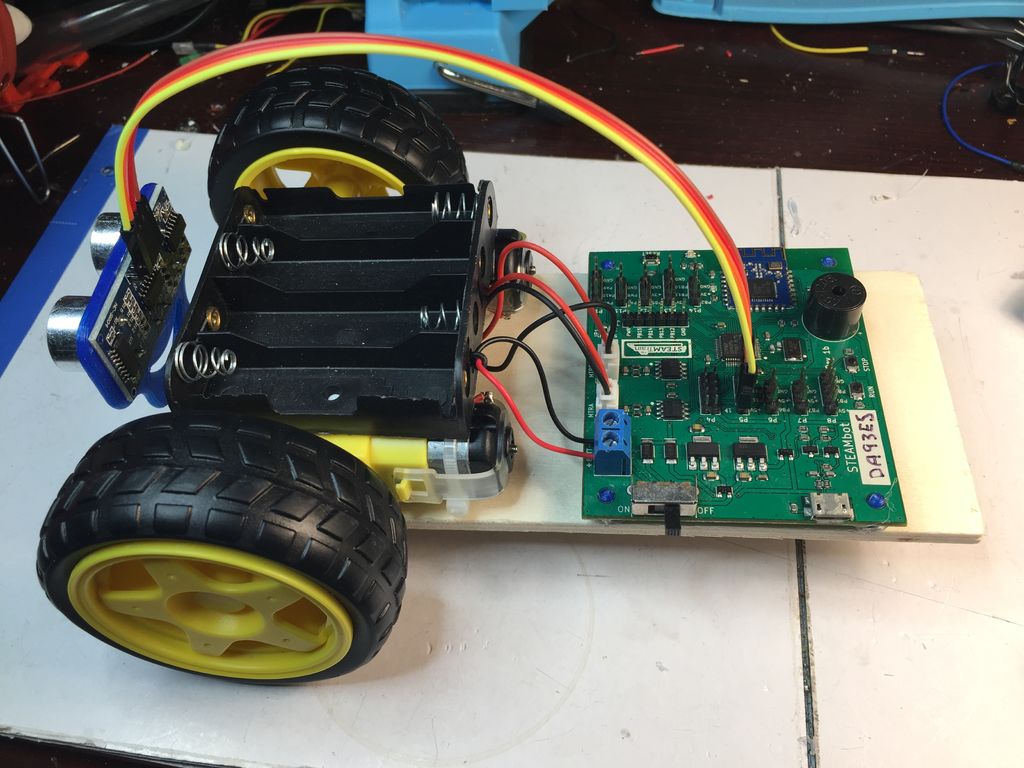
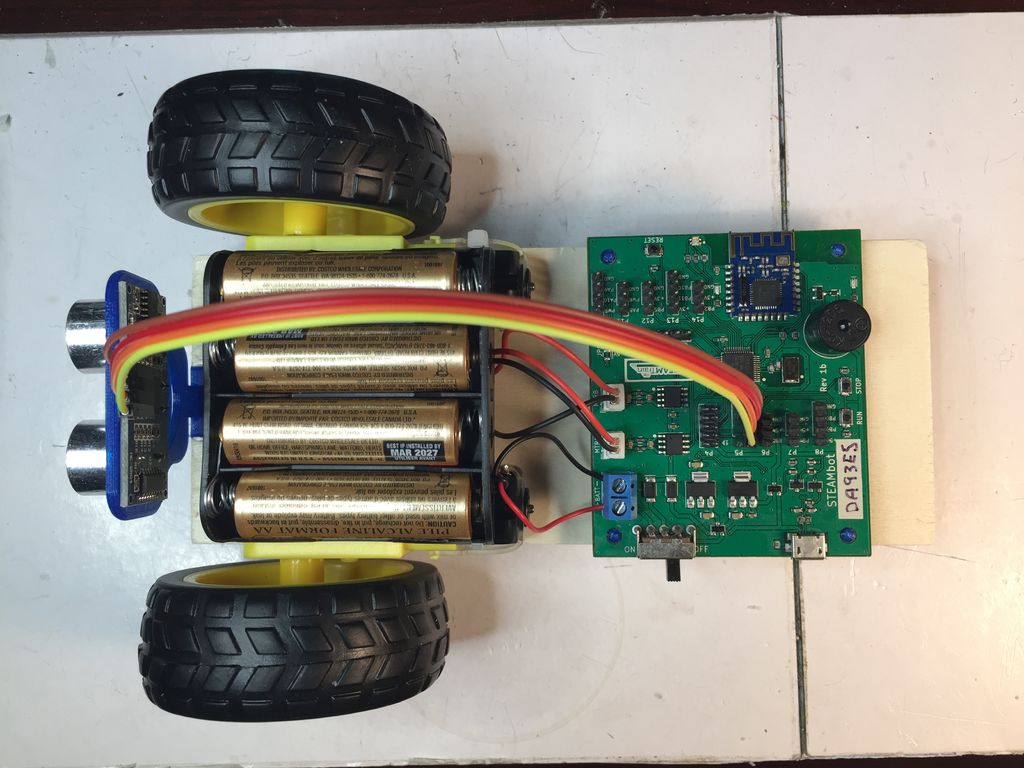
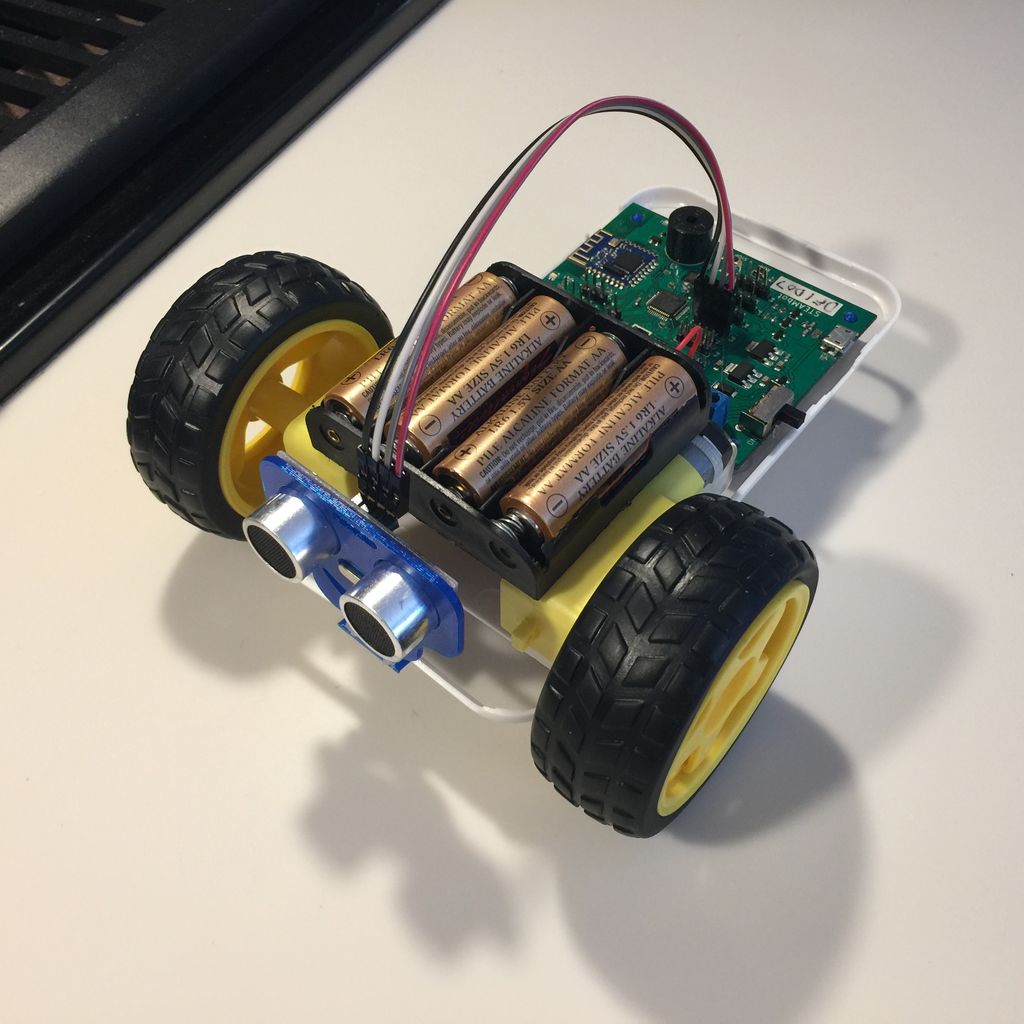
步驟4:連接STEAMbot控制器

要連接STEAMbot控制器,請(qǐng)執(zhí)行以下操作:
使用熱膠槍,將控制器支架粘貼到扁平物品的頂部。如果使用高溫膠水,則使用PLA進(jìn)行三維打印,因此要非常小心。
將STEAMbot控制器放在支架上。電源開關(guān)應(yīng)位于左側(cè)。
使用小型平頭螺絲刀,將電池座上的紅線連接到+端子螺釘。
安裝黑色電線。電池座 - 端子螺釘。
將電機(jī)從左電機(jī)推入標(biāo)有MTRA的左側(cè)連接器。
將電機(jī)從右電機(jī)推入右側(cè)連接器,標(biāo)記為MTRB 。
步驟5:連接滾輪


附加滾輪,請(qǐng)執(zhí)行以下操作:
將機(jī)器人車翻轉(zhuǎn)并在機(jī)器人后部放置一個(gè)支撐,以保持平坦物品的水平。
將滾輪放置在機(jī)器人汽車后部附近并居中。
將滾輪熱膠粘到機(jī)器人汽車的底部。
步驟6:安裝超聲波傳感器
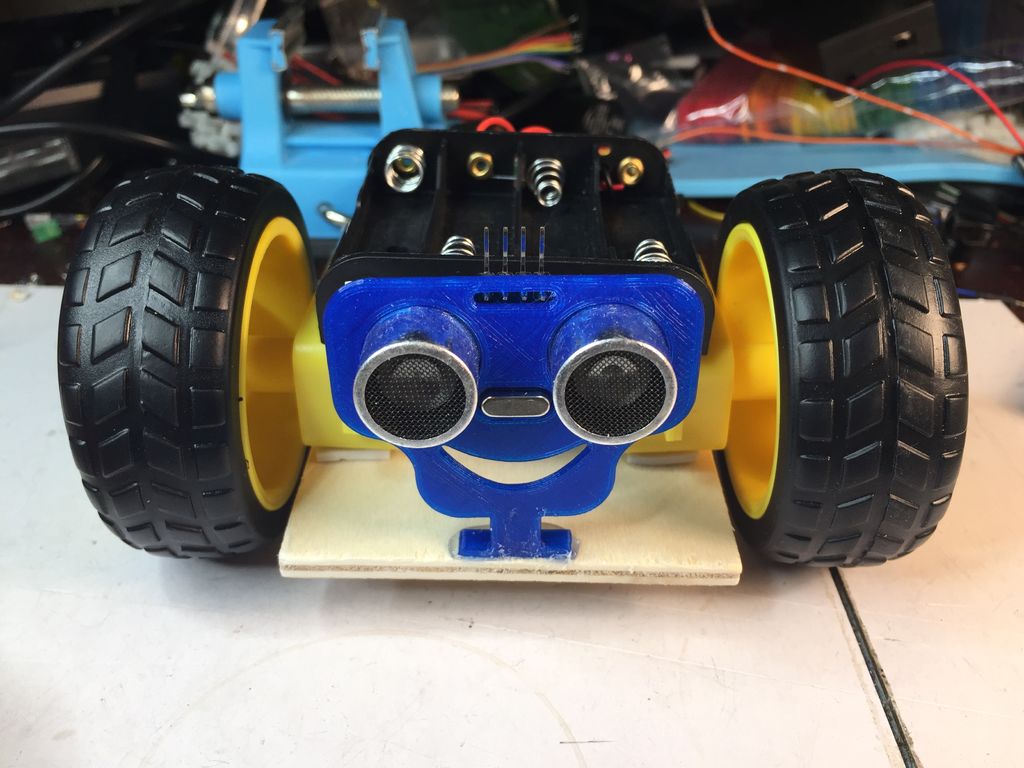
要安裝超聲波傳感器,請(qǐng)執(zhí)行以下操作:
如果支架中尚未安裝超聲波傳感器,請(qǐng)小心地將超聲波傳感器推到支架。
將帶有超聲波傳感器的支架熱粘到機(jī)器人車前部。
將4芯導(dǎo)線連接到超聲波傳感器上,注意不要彎曲插針。
將4芯導(dǎo)線的另一端連接到STEAMbot控制器上的P5連接器,同時(shí)注意不要彎曲插針或穿過導(dǎo)線。
步驟7:裝飾你的機(jī)器人車(可選)



如果你想有創(chuàng)意,裝飾你我們的機(jī)器人車。以下是一些建議:
如圖所示,使用管道清潔器,絨球和其他東西來裝飾您的機(jī)器人汽車。
使用紙張和紙張創(chuàng)建封面Cricut(或類似)機(jī)器。
購買新的或二手的玩具并使其適合您的機(jī)器人汽車。
步驟8:為機(jī)器人供電汽車
要為您的機(jī)器人汽車供電,請(qǐng)執(zhí)行以下操作:
確保電源開關(guān)處于關(guān)閉位置(朝向機(jī)器人后部)。
裝入4節(jié)AA堿性電池。 NiCd或NiMH電池不能正常工作,因?yàn)殡妷禾汀?/p>
將電源開關(guān)推到“打開”位置(朝向機(jī)器人汽車的前部)。
電源LED應(yīng)亮紅燈,RGB LED將閃爍并改變顏色。在一兩秒內(nèi),你應(yīng)該聽到一聲嗶嗶聲。
此時(shí),您的機(jī)器人汽車已準(zhǔn)備好通過移動(dòng)應(yīng)用程序進(jìn)行控制或進(jìn)行編程。
步驟9:遠(yuǎn)程控制模式
機(jī)器人汽車的默認(rèn)模式(首次啟動(dòng)時(shí))是遠(yuǎn)程控制模式。要遠(yuǎn)程控制機(jī)器人汽車,請(qǐng)?jiān)贐luetooth LE兼容設(shè)備上安裝 My STEAMbot 移動(dòng)應(yīng)用程序。對(duì)于iOS設(shè)備,請(qǐng)?jiān)诖颂帿@取應(yīng)用。對(duì)于Android設(shè)備,請(qǐng)?jiān)诖颂帿@取應(yīng)用程序。
步驟10:貓模式
第二個(gè)內(nèi)置模式是 Cat模式 。雖然視頻是STEAMbot機(jī)器人,但您的機(jī)器人汽車將以相同的方式運(yùn)行。要將機(jī)器人車輛置于 Cat模式,請(qǐng)執(zhí)行以下操作:
將機(jī)器人車放在地板上。
同時(shí)按下RUN和STOP按鈕(它們位于STEAMbot控制器的后部)。
聽到兩聲嘟嘟聲并且RGB LED開始閃爍后,將手或其他物體放在機(jī)器人車前。在一定距離(約20厘米)處,您的機(jī)器人車將向前移動(dòng)。但是如果你把你的手(或其他物體)放在離你的機(jī)器人車太近的地方,那么它就會(huì)退回。
要回到默認(rèn)的遙控模式,推動(dòng)兩者同時(shí)運(yùn)行和停止按鈕。
步驟11:使用Blockly編程機(jī)器人汽車(可選)
要使用Blockly對(duì)機(jī)器人汽車進(jìn)行編程,請(qǐng)將Chrome瀏覽器(從Chromebook或Mac計(jì)算機(jī))指向STEAMbot Programmer頁面。您的機(jī)器人車必須處于遠(yuǎn)程控制模式。
步驟12:使用Arduino IDE編程機(jī)器人車(可選)
您可以使用C ++語言和免費(fèi)的Arduino IDE對(duì)機(jī)器人汽車進(jìn)行編程。要使用Arduino IDE對(duì)機(jī)器人汽車進(jìn)行編程,請(qǐng)從此處下載STEAMbot用戶指南(任一版本均可使用),并按照指南中的軟件安裝說明進(jìn)行操作。
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28593瀏覽量
207825
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
人形機(jī)器人“造車”,車企扎堆布局!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論