 自動喂魚器的制作
自動喂魚器的制作
第1步:準備材料
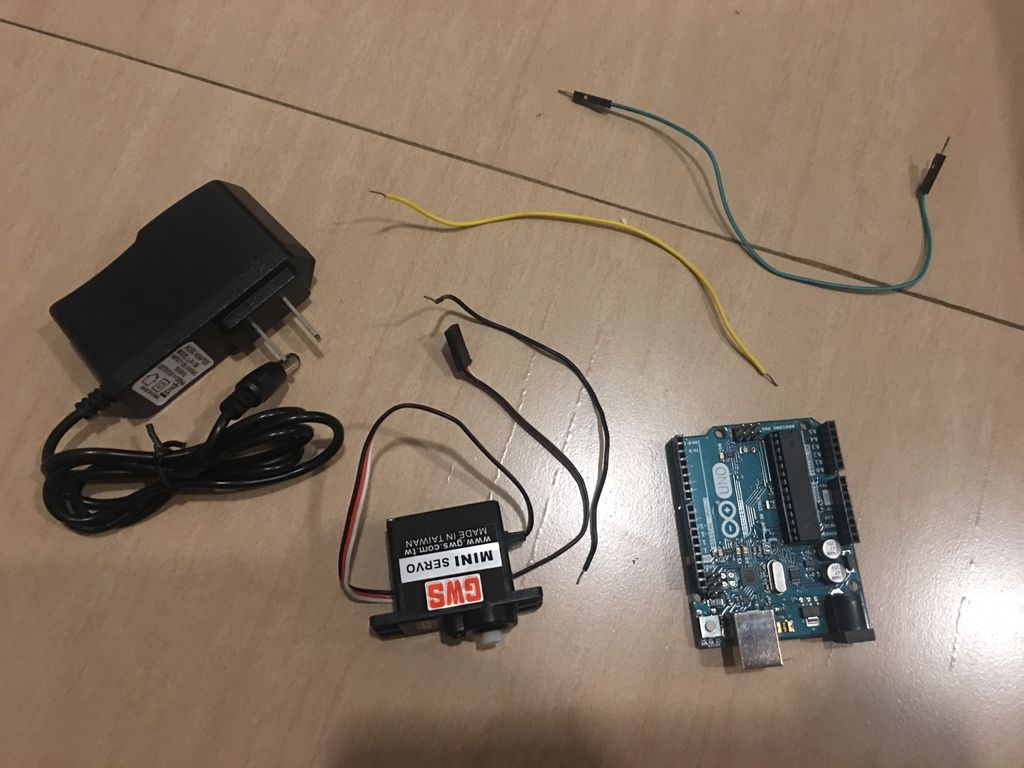
為此項目,您將需要以下材料:
電路:
3根絕緣銅線(22AWG線),長約4-6英寸,兩端剝去
GWS小型伺服
雙側伺服臂
伺服螺絲(1.7 x 3mm)
USB線A至B
用于構建外殼:
田宮水泥膠
或膠水槍
步驟2:激光切割食物儲存
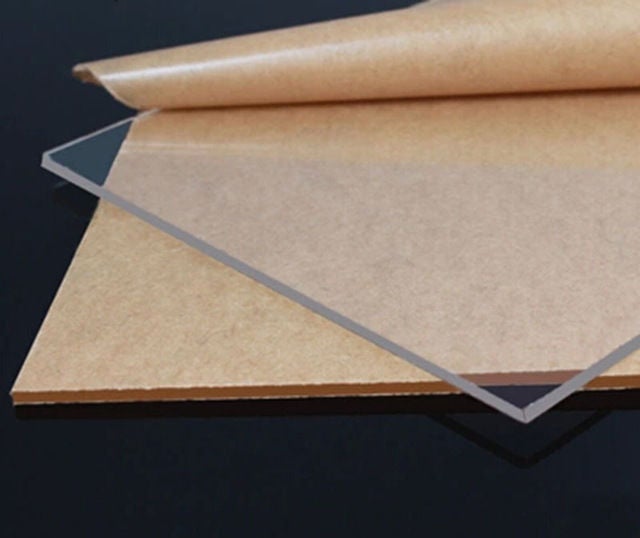
首先,您需要激光切割魚食儲存箱或料斗。
將2mm丙烯酸置于激光切割機中,紙張側面位于底部。確保在切割前校準z軸。
將下面的PDF文件加載到Universal Laser Systems控制面板中,然后將圖像重新定位到丙烯酸板上所需的位置。打開設置并轉到手動控制。加載2mm丙烯酸樹脂的設置,然后應用這些設置。
此文件需要5-10分鐘才能完成。
步驟3:激光切割六邊形外殼和旋轉臂
再次,除了使用這兩個文件之外,執行與料斗相同的步驟。
加載這兩個PDF文件然后剪切。
總共需要5-10分鐘。
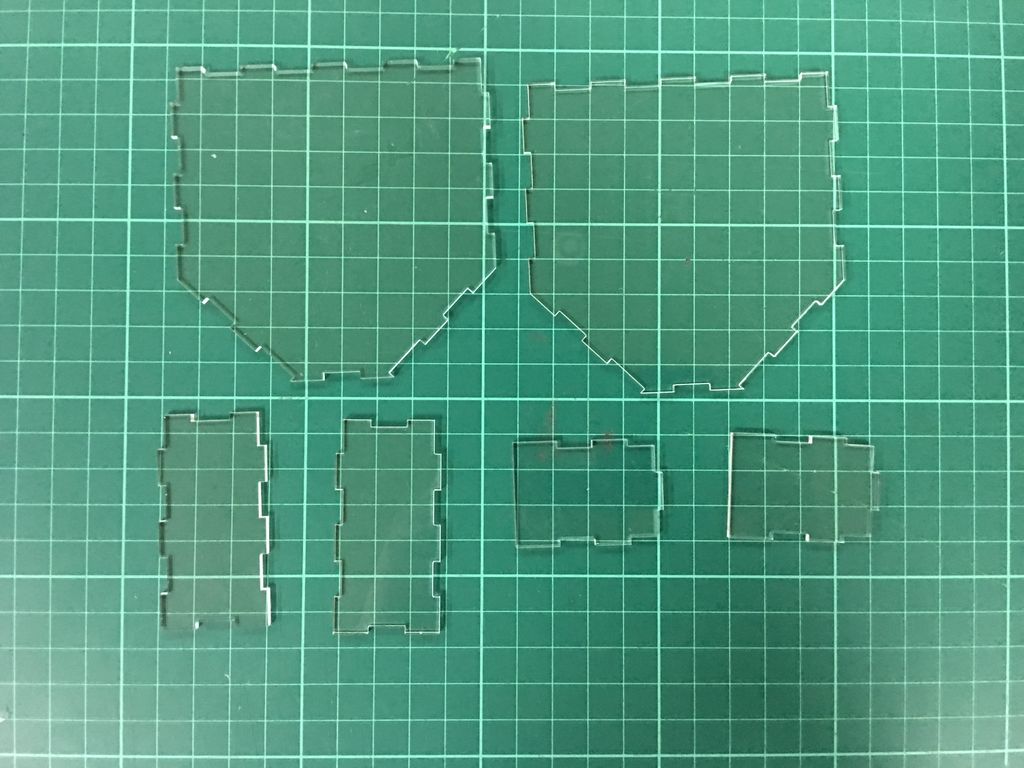
步驟4:激光切割外殼
最后,激光切割外殼。隨附的是以下文件:
包含TOP
包含BOTTOM
包含LARGE face(將此文件剪切為兩個以最終為兩個
包含有洞的側面
無洞地插入SIDE
名為Encasing FULL的文件只是上面編譯的所有上述PDF文件在單頁中,當你的丙烯酸板上有足夠大的空間來容納整個設計時。
切割過程需要10-20分鐘。
步驟5:組裝食品儲存
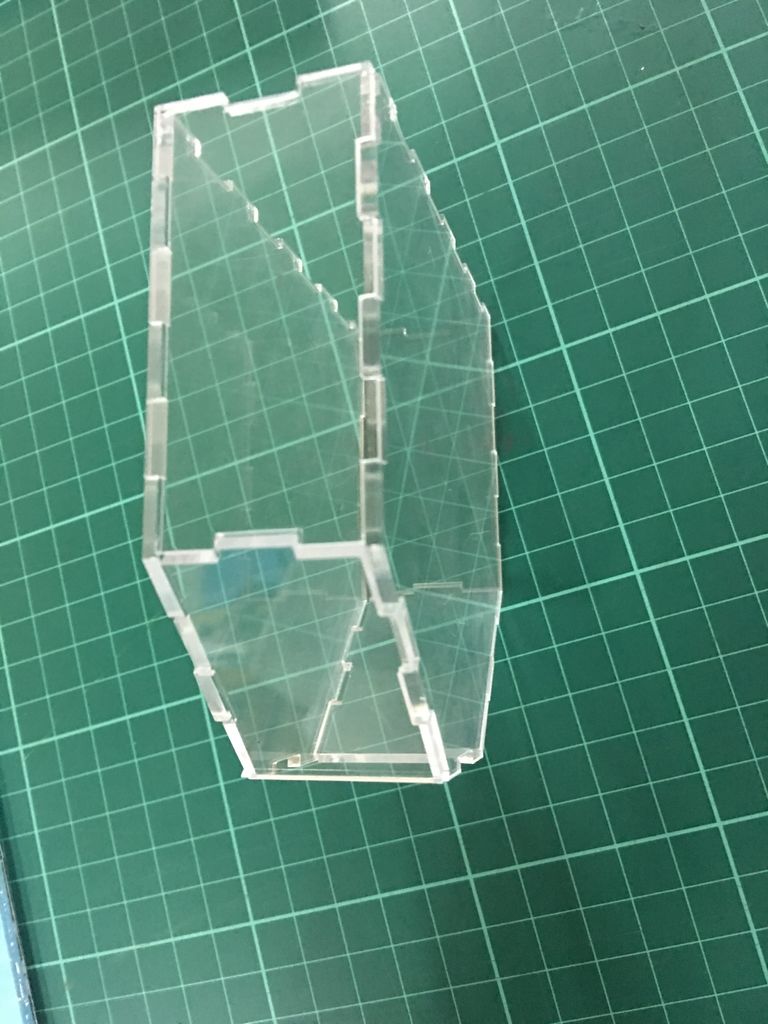
現在,仔細組裝食品儲存器或料斗。拿你的切割丙烯酸并去除紙背襯。
這種設計是為了摩擦配合,但你可以選擇添加一些Tamiya水泥膠或膠槍來加強儲存箱。
摩擦配合的一些提示:
取2個相鄰的面(我通常從最大的面開始)并將它們的公共邊緣首先放在平坦的表面上
慢慢抬起其中一個面,使其傾斜到適當的位置 - 就像彎曲一個面與另一個面形成90度角一樣。
要溫柔,繼續前進,直到你完成整個事情
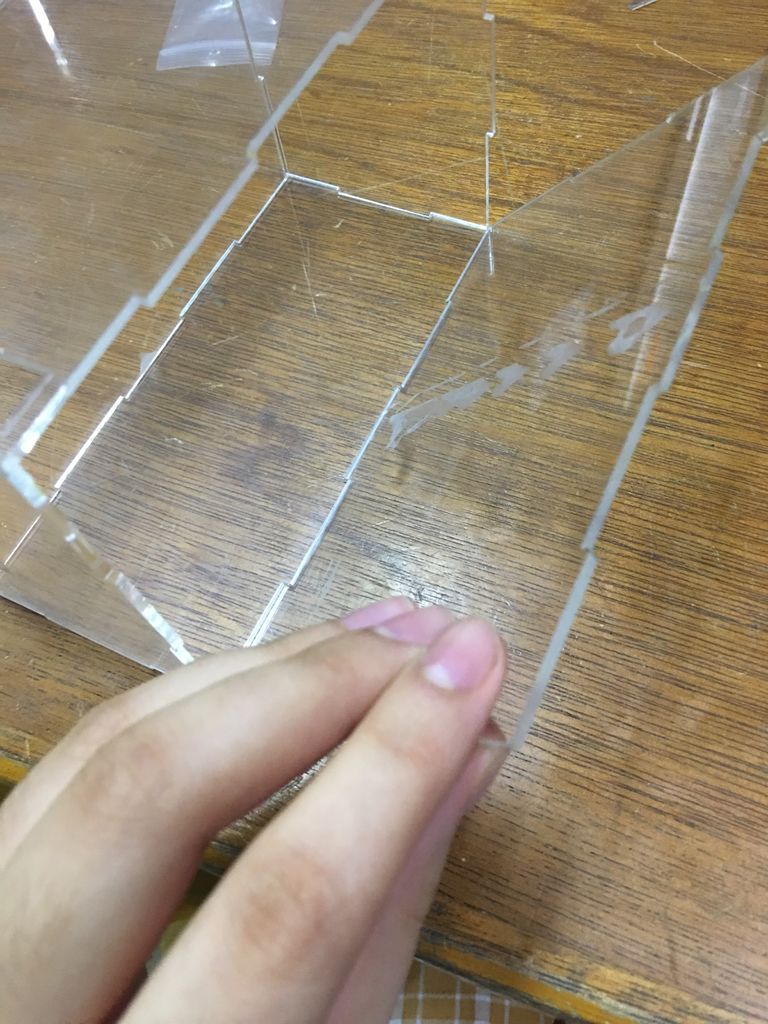
第6步:組裝六邊形包裝

現在,在組裝六邊形外殼時也要做同樣的事情。開始在具有孔的六邊形面上組裝零件。現在留下另一個六角形面,因為我們仍然需要將伺服臂和旋轉臂連接在六角形外殼內。
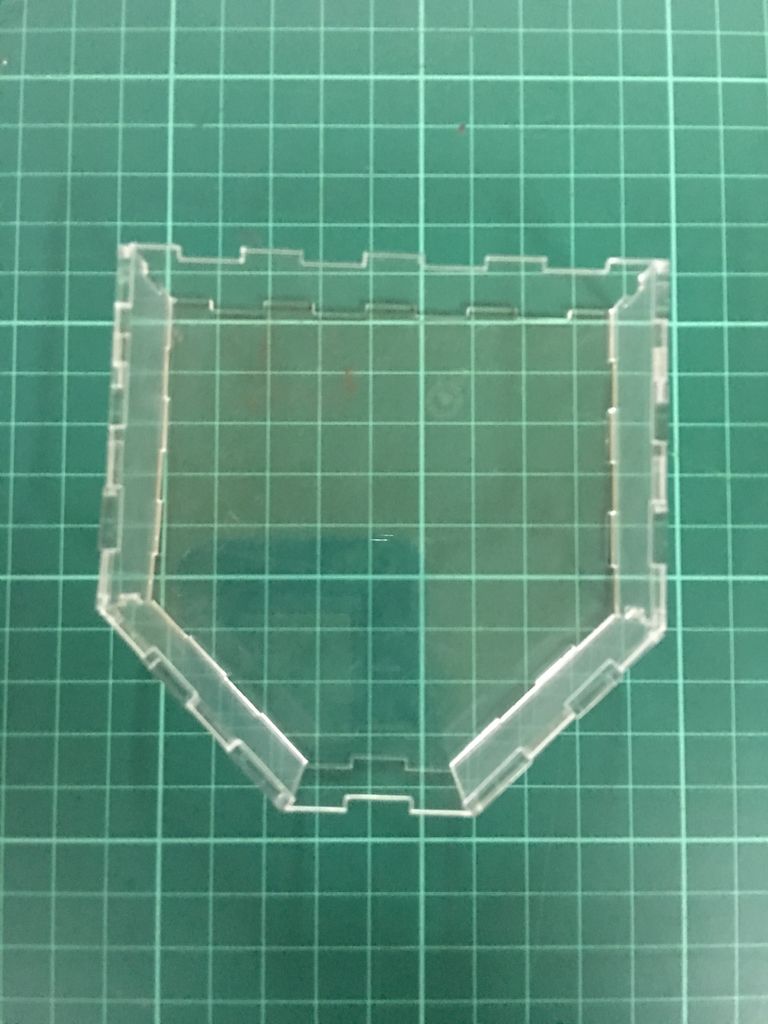
步驟7:組裝Encasing
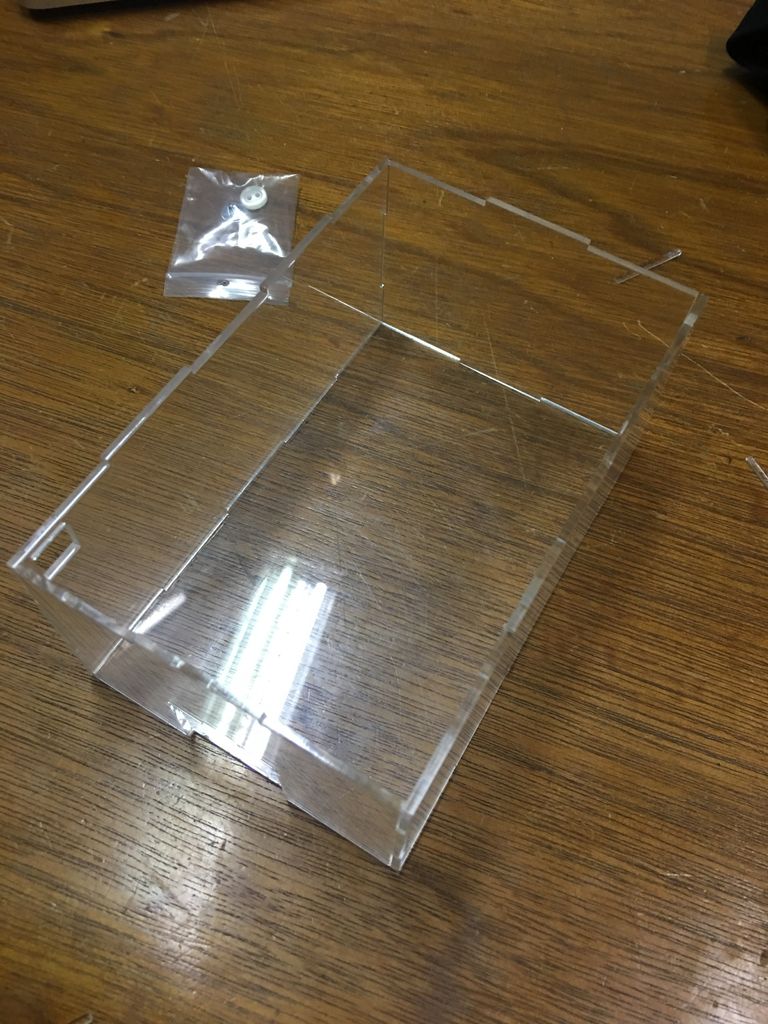
接下來,組裝包裝。
組裝外殼:
確保BOTTOM的孔面向一個大型面附近,并且有孔的側面的孔更靠近相對的LARGE面。這是因為BOTTOM面的孔應該是食物掉落的地方,并且SIDE WITH HOLE的孔是用于連接到Arduino的電源線
不要穿上LARGE因為我們還需要一個開口,以便我們安裝食物儲藏室,六角形外殼和電路。
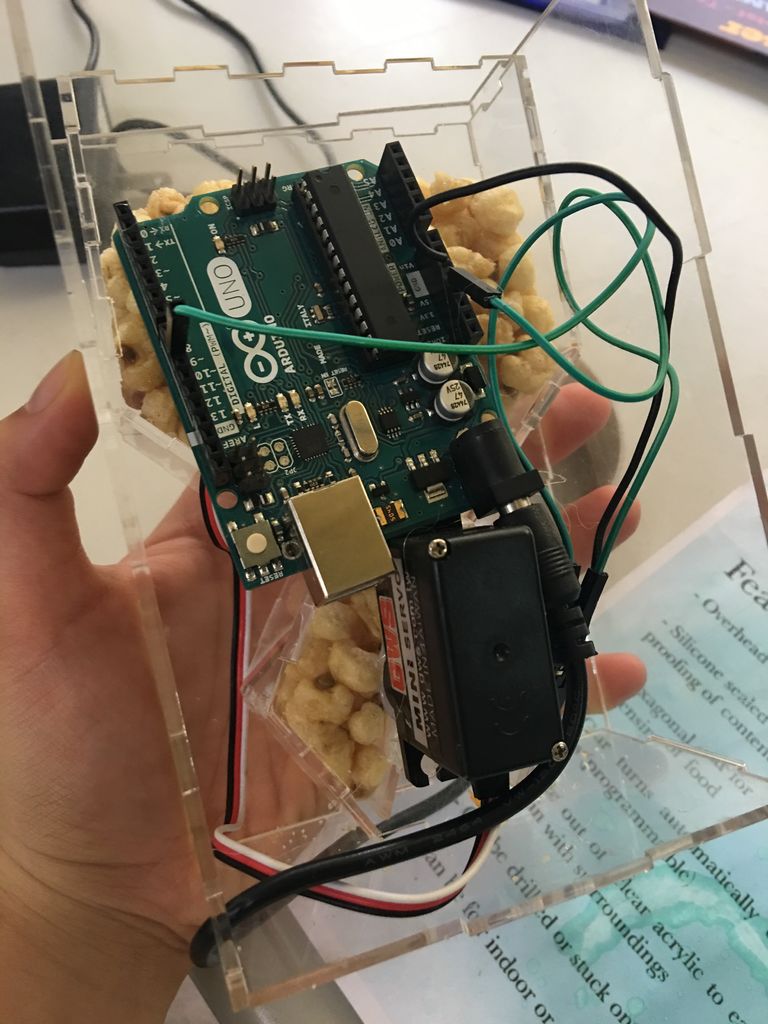
步驟8:構建電路
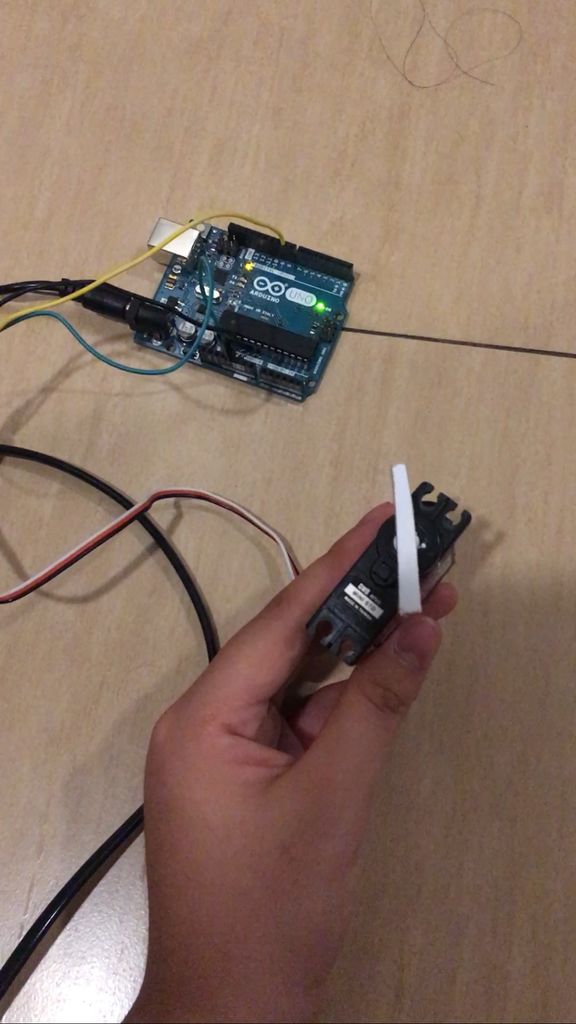
要構建電路,需要執行以下操作
獲取一根電線(兩端剝去)并將一端插入Arduino上的GND端口。這代表著地面。
將此電線的另一端插入伺服黑色電線的母端。
獲取另一根電線并將一端插入說明5V的端口Arduino。
取下電線的另一端,插入伺服電機紅線的母端。
最后,換另一根電線,將一端插入第9針。在Arduino上。
取下電線的另一端,將其插入伺服電機白線的母端。
接下來,確保已安裝Arduino IDE。這將允許您創建和上傳程序到您的Arduino。
將SweepDos.ino上傳到您的Arduino。您可以根據完成旋轉臂的需要將度數從90更改為60。您也可以根據需要更改輪換之間的延遲時間。
您現在可以斷開Arduino與計算機的連接。您現在可以插拔然后將AC/DC適配器連接到電路板以測試電路。
步驟9:構建旋轉機制

將您的伺服器粘合或粘合在六角形外殼的背面。確保伺服的輸出軸或花鍵進入六角形外殼中間的孔內。
接下來,拿起伺服臂并將其放在輸出軸的頂部。帶有凹槽內邊緣的中心孔應朝向軸線朝下。拿起螺絲,將其放入伺服臂的中心孔。由于輸出軸由柔軟材料制成,因此通過螺紋將其擰緊到位。調整旋轉臂的角度,使其處于附加照片中的位置。
在伺服臂上涂上或涂上丙烯酸旋轉臂的設計。
相應地測試和調整手臂。
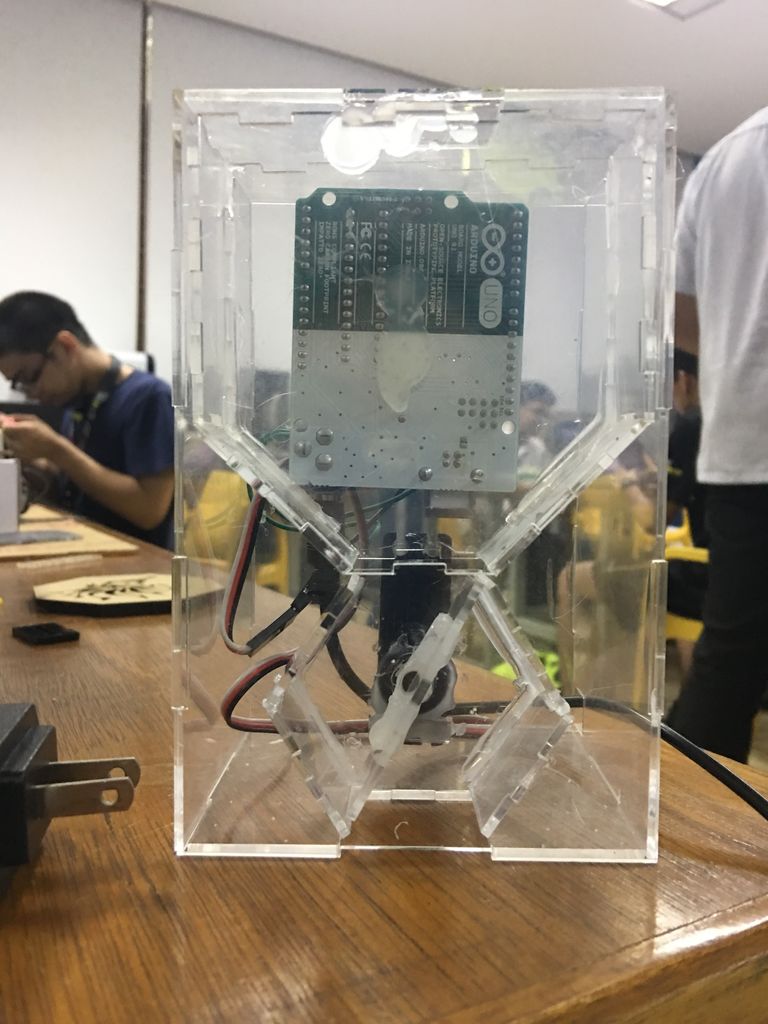
步驟10:組裝所有模塊
最后,將所有部件放在一起。
插入六邊形的底部插槽,包住較大外殼底面的孔。
接下來,放置食物儲存器并用六邊形外殼將其插入到位。
將Arduino粘在或粘在食物儲存的背面。
將AC/DC適配器的電纜穿過較大外殼側面的小孔并連接到了Arduino板。
完全組裝你的大包裝的所有部分。
第11步:你做完了!
耶!你已經完成了魚飼養器的建造!
現在,你可以在里面放一些輕量食物喂魚
或者一些玉米棒,這樣它就變成了自動Alicia給料機。
-
喂食器
+關注
關注
1文章
24瀏覽量
3111
發布評論請先 登錄
相關推薦
GUC65(A)礦用本安型位置傳感器制作過程
自動熔斷器的優缺點分析
AIGC在視頻內容制作中的應用前景
燈光定時器自動控制器怎么調
電源變換器的制作步驟包括哪些?
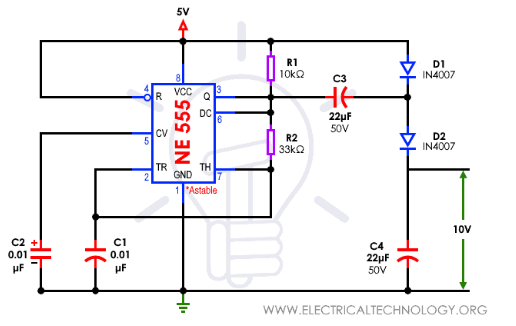
如何使用555定時器制作電壓倍增器電路
PCB電路板設計與制作的步驟和要點
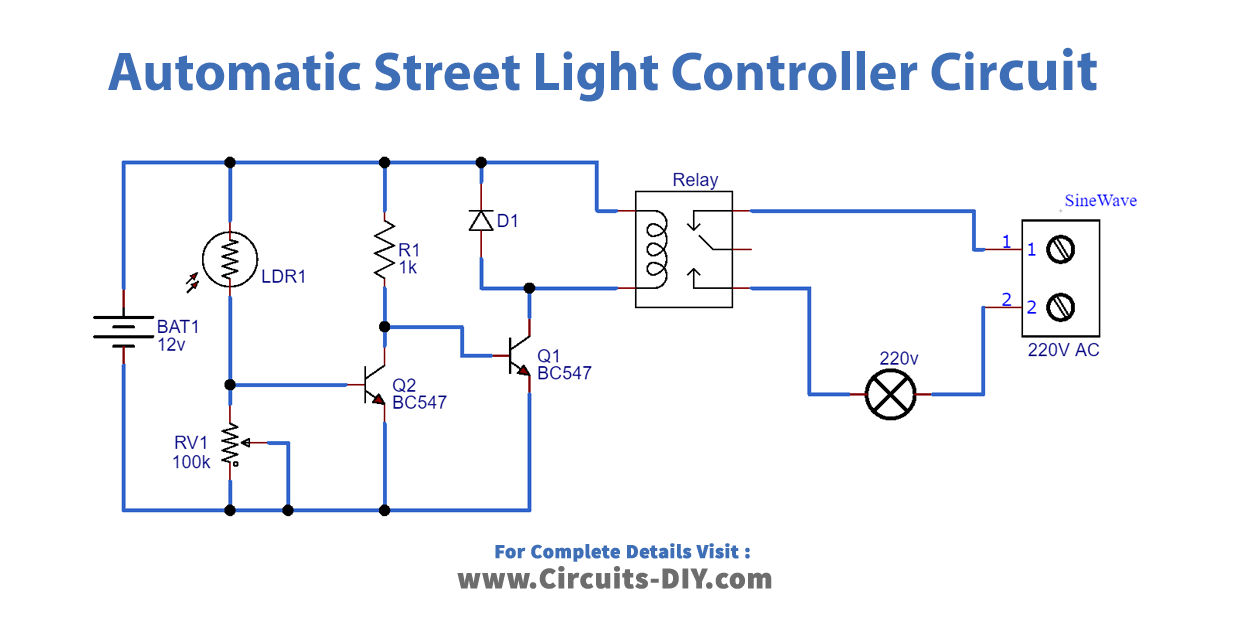
自動路燈控制器電路圖 自動路燈控制器的工作原理和特點
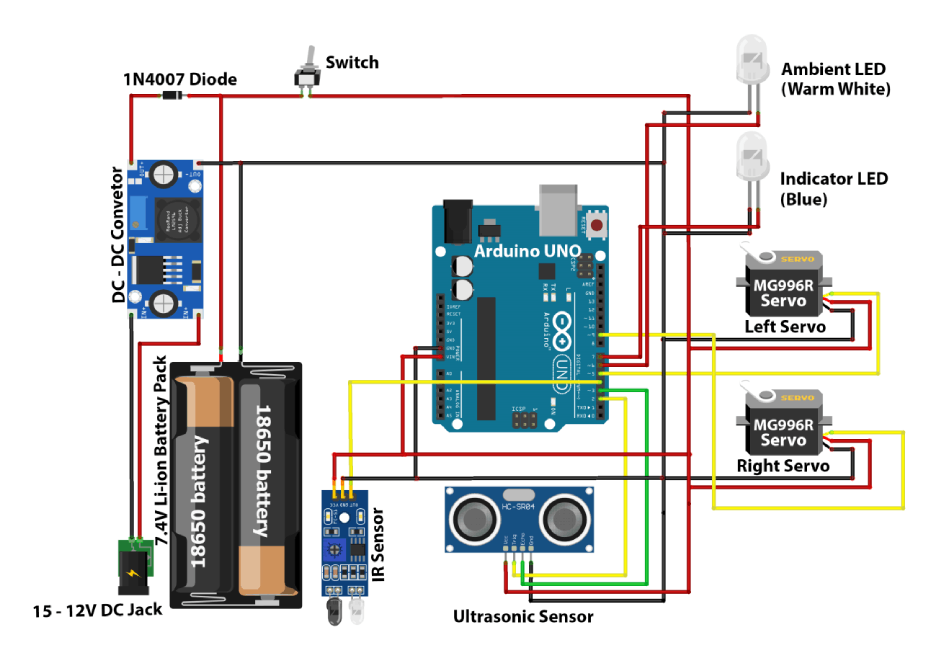
如何用Arduino制作一個簡易自動喂魚器
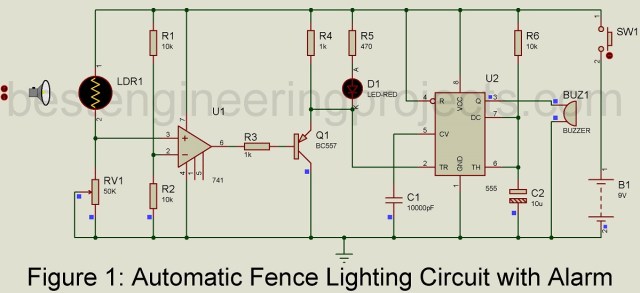
如何使用運算放大器741和IC555制作帶有警報的自動圍欄照明電路





 工商網監
工商網監
評論