 如何編程簡單的機器人汽車
如何編程簡單的機器人汽車
步驟1:零件清單
首先需要以下部分
1。易于從ebay上以10歐元左右的價格購買的底盤和電機套件鏈接
2。 arduino板。我用的是從ebay購買的arduino uno R3,價格為4歐元。對于原始鏈接在這里。要獲得價格便宜的兼容鏈接,請點擊此處
3。來自ebay的迷你支架從這里的ebay鏈接上花費約0.80€(我使用了中號支架,因為我沒有備用的mini)
4。 L293D電機驅動器H橋IC的價格約為0.8歐元(來自ebay鏈接)
5。超聲波傳感器HC-SR04的價格為0.8歐元(來自ebay鏈接)
6。電池組(您可以使用四個能提供6V的堿性或NiMH AA或兩個能像我一樣提供7.2V的18650 AA)
7。 7805穩壓器IC(可選取決于電池組)在此處鏈接
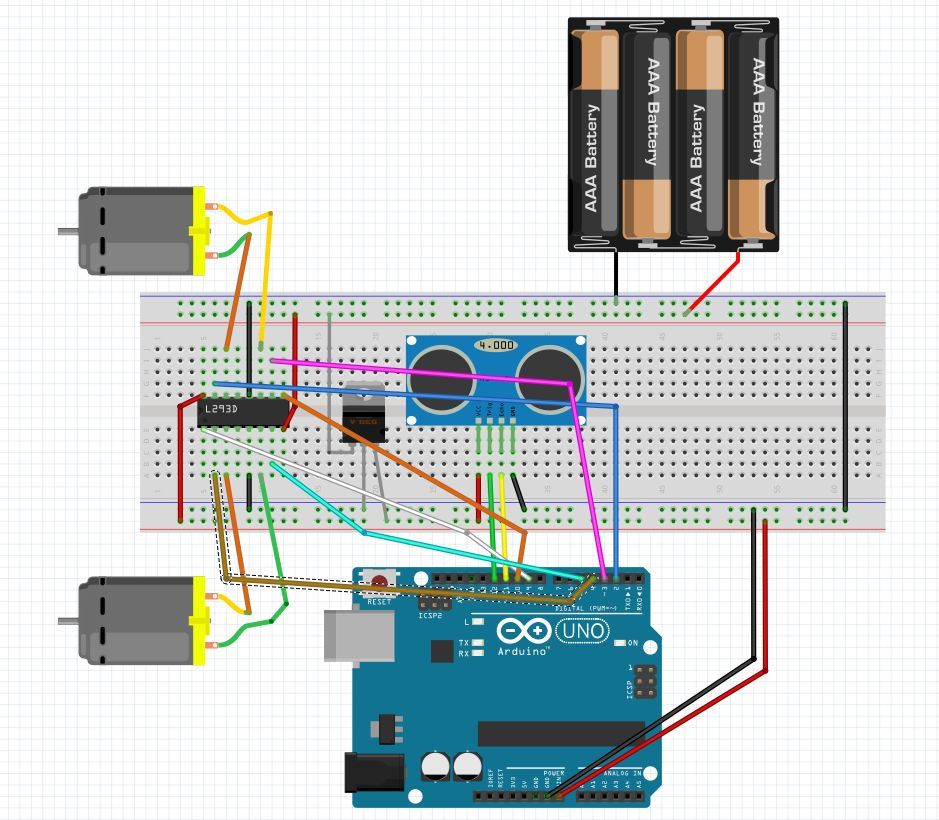
步驟2:連接
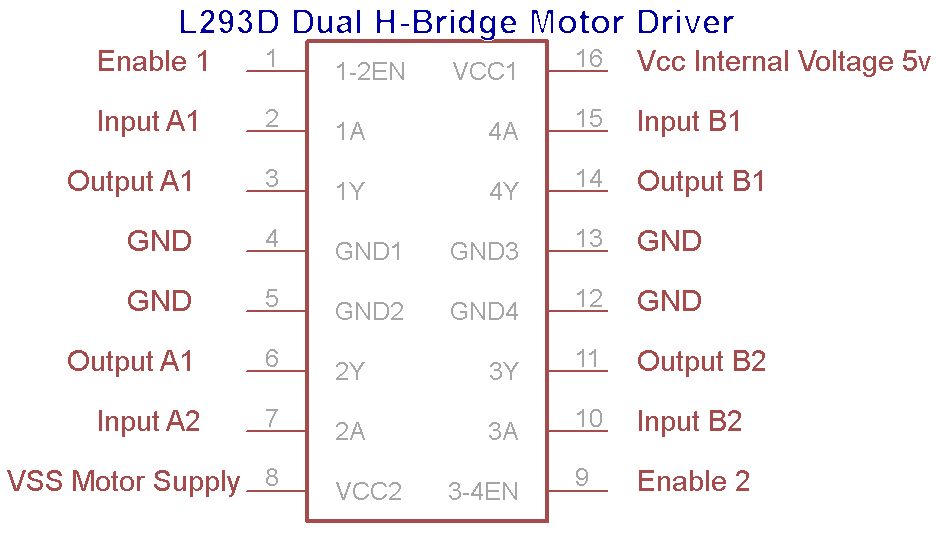
了解L293D雙H橋電機驅動器的用法至關重要。/p》
您可以在圖中看到兩個電動機的連接( 3,6針(電動機A1)和 11,14(電動機A2)因此)。因此,電機連接到這些引腳,并根據arduino草圖順時針或逆時針旋轉。但是為了控制它們的速度,您必須使用電動機A1的引腳1使能和電動機A2的 9引腳使能,并從arduino模擬輸出引腳提供電壓。這也是一種校準機器人運動的方法,因為電機的質量不是最好的,而且通常一個電機要比另一個電機快。
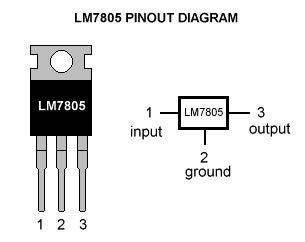
對于電源,如果您使用的電池組超過6V時,您必須使用7805穩壓器,該穩壓器將為您提供恒定的5V電壓來為arduino,L293D和HC-SR04提供電源。從示意圖中可以看到,pin1是接地的輸入pin2,pin3是5V輸出。
如果不確定或擔心會燃燒某些東西,最好為arduino提供9V常規電池并從arduino提供5V電壓至L293D和HC-SR04,并為電機提供不同的電源。
請檢查L293D是否連接到兩個電源,引腳16(Vs +)需要5v才能使芯片工作,引腳8(Vss +)需要向電機供電并可以控制更多電源(最大如您在數據表中看到的24V)。 L293D具有相當的彈性,我還沒有像其他電子設備一樣設法銷毀一個,但最好在開始使用實際電壓連接之前研究連接。
因此在連接任何東西之前,請先研究原理圖《293》
步驟3:Arduino代碼
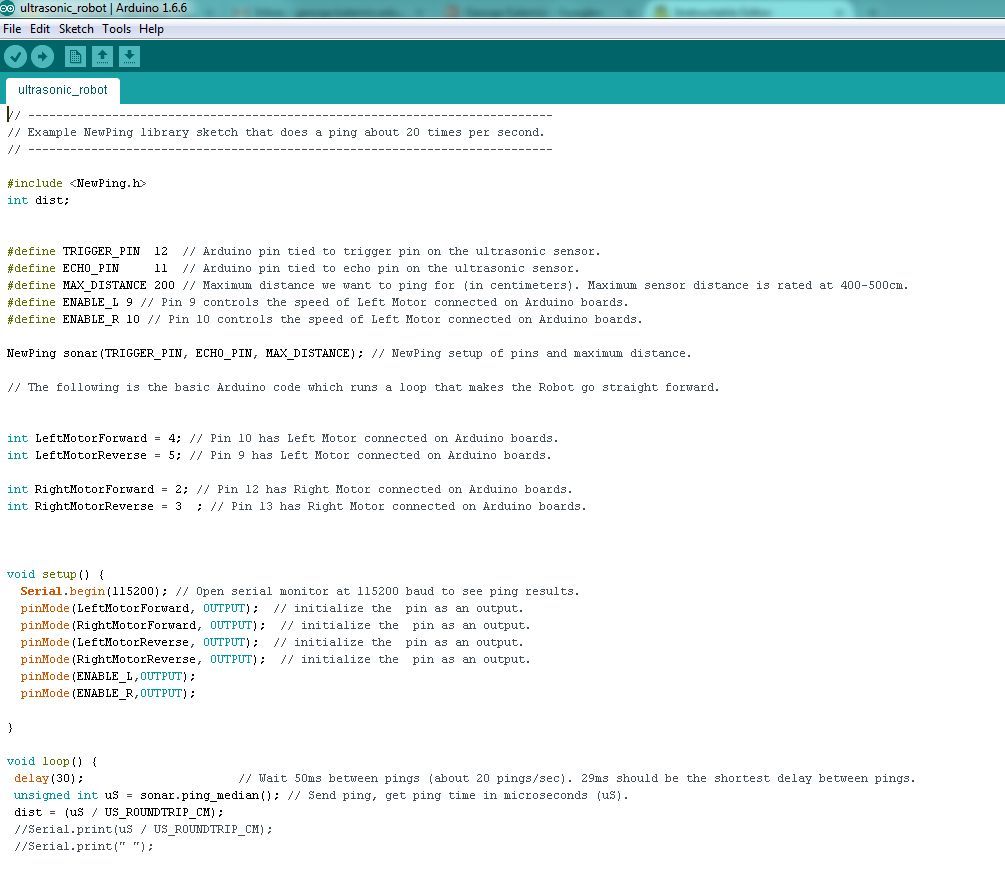
在隨附的arduino代碼文件中,有每個引腳連接的文檔。
您可以看到,取決于機器人快速前進的距離,前進,停止,后退和快退。我正在為HC-SR04使用NewPing庫,該庫比我對HC-SR04的手動處理更為準確。
您可以使用串行端口以115200波特率測試HC-SR04測量的距離。首先卸下Vss(L293D上的pin8)電纜,以使電機不工作(并且不必將機器人懸空)
如果有速度更快的電機,也有校準電機的文檔。
責任編輯:wv
-
機器人
+關注
關注
211文章
28632瀏覽量
208080 -
編程
+關注
關注
88文章
3637瀏覽量
93923 -
Arduino
+關注
關注
188文章
6477瀏覽量
187648
發布評論請先 登錄
相關推薦
使用 Thonny 對 XRP 機器人進行編程

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
焊接機器人編程技巧與注意事項
工業機器人編程流程及注意事項
工業機器人的四種編程(示教編程、離線編程、自增強現實編程主編程)剖析!

柔性機器人和剛性機器人有什么區別?






 工商網監
工商網監
評論