 簡易Arduino機器人的制作
簡易Arduino機器人的制作
步驟1:準備
步驟2:
通常,機器人是虛擬的人工或機械代理,能夠對環境做出反應并自主決定要實現特定目標的行動。這些角色將機器人與汽車或烤面包機等東西區分開來,因為它們無法感知環境。
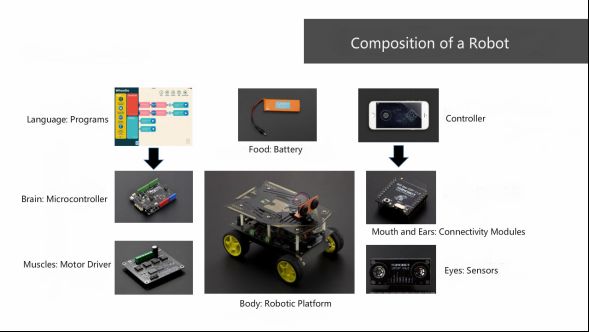
機器人通常由電子電路或計算機程序控制。在這里,我拍了一張圖,表明Arduino機器人的基本組成。
機器人平臺是決定它的外觀和功能的機器人主體。輪式平臺是目前最常見的平臺。與其他產品相比,它具有一些優勢,例如相對較低的成本,豐富的選擇以及簡單的設計和構造。強烈建議對機器人初學者使用。
微控制器是機器人的大腦,因為它能夠執行程序,并負責所有決策,計算和通信。 Arduino UNO和Romeo是用于DIY Arduino機器人的兩種流行的微控制器。
電動機是可以將電能轉換為物理運動的設備,而電動機驅動器則充當微控制器,電池和電動機之間的中間設備。它以所需的電壓提供電流,并與微控制器一起工作,以使電動機適當地移動。
由于各種機電傳感器,機器人具有感知周圍環境的能力。例如,紅外傳感器可以幫助Arduino機器人檢測自身與物體之間的距離,然后將該信息反饋給微控制器。制造線跟蹤機器人需要灰度傳感器。
在開始制造機器人之前,最好先了解一些基本工具。
第3步:基本工具



螺絲起子
螺絲起子,一種用于擰緊螺絲(驅動或卸下螺絲)的工具)對于構建機器人必不可少。我們建議您帶一把螺絲起子,這對于處理不同類型和大小的螺絲非常方便。
吸錫筆
錫焊筆是電子項目中經常用于在電路板上進行焊接和去焊的工具。在這個項目中我們需要用它來焊接電動機的電纜。
注意:加熱后,焊接筆的筆尖會變得非常熱。如果您以前從未使用過電焊筆,請花一些時間來熟悉如何使用電筆。使用電焊筆時要當心!
針鼻鉗
針鼻鉗通常用于切斷電纜和電線的多余長度。在這個項目中,我們不會使用過多的鉗子;但是,它們是電子項目中必不可少的工具。
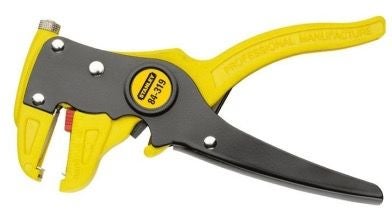
剝線鉗
剝線鉗是用于剝去電氣絕緣層的手持式工具斷線。如果需要,剝線鉗也可以用剪刀代替。使用此工具時,只需要剝去第一層絕緣層即可,使內部的導線暴露在外。這有助于簡化焊接過程。
步驟4:裝配說明-步驟1
下一步,系統將教您建立一個基本的Arduino機器人。為了使本教程易于理解,此處以Arduino機器人套件(海盜:帶有藍牙4.0的4WD Arduino移動機器人套件)為例。
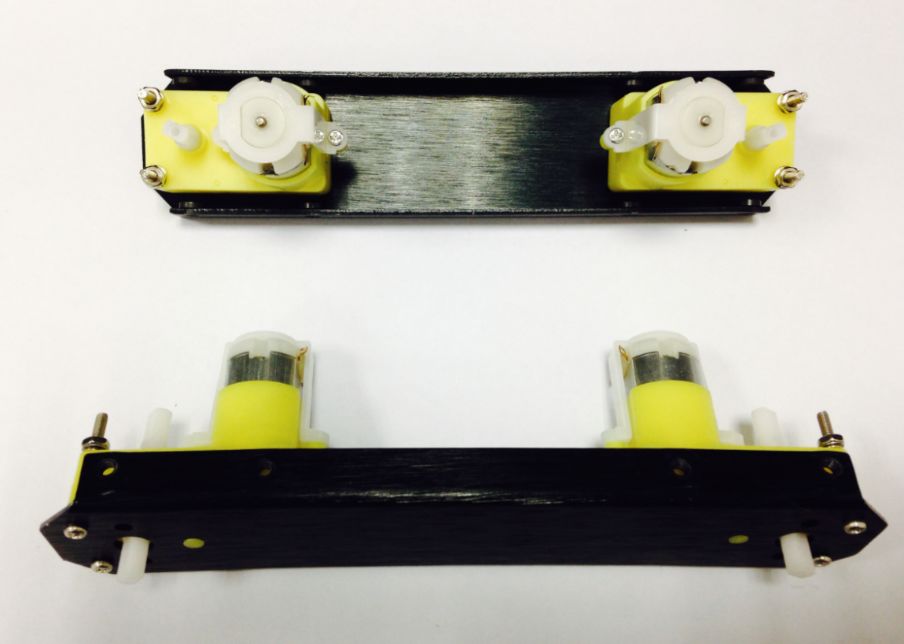
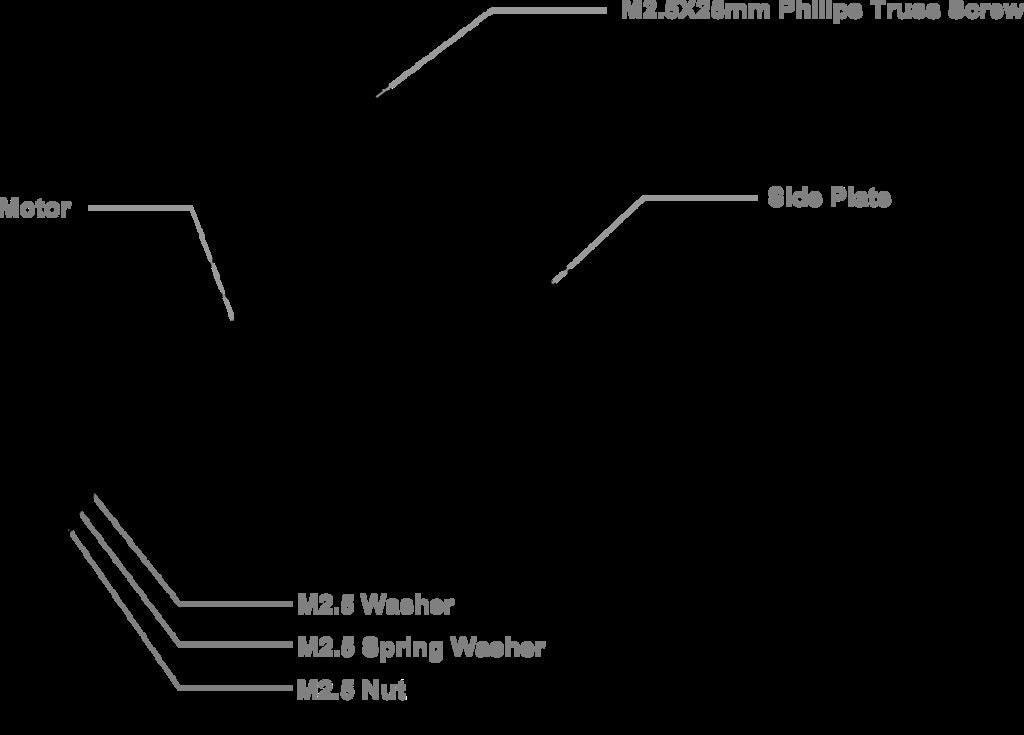
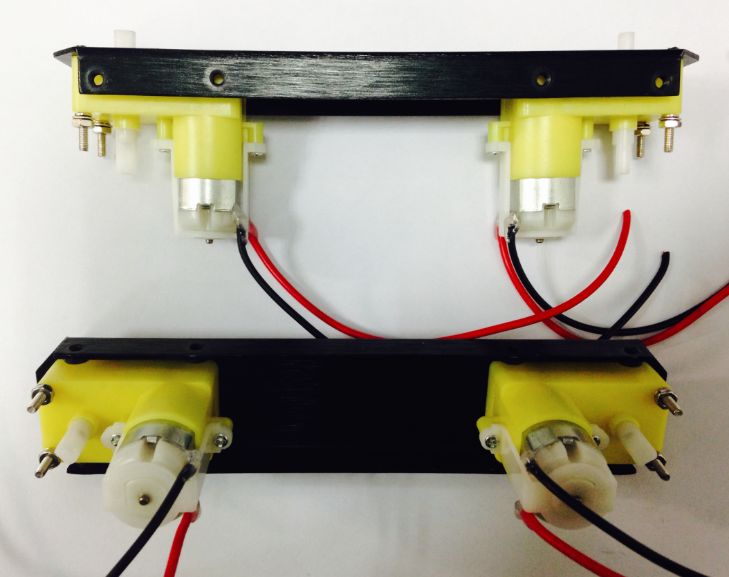
STEP1:組裝自己的電動機
在零件袋中尋找八個長螺絲。這些用于將電動機固定和固定到位。正確對齊電機,然后將它們擰緊到位,如下圖所示。
請注意,零件包中還包括墊圈和墊圈。墊圈可用于增加摩擦力,這有助于將電動機固定到位。墊圈有助于防止由于機器人的運動和碰撞而導致螺母松動和脫落。
步驟5:組裝說明-步驟2:焊接電纜
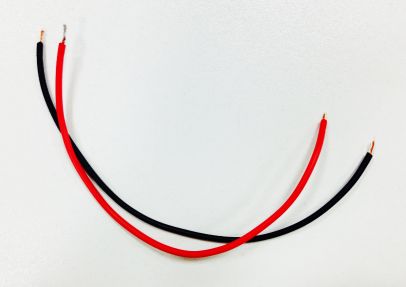
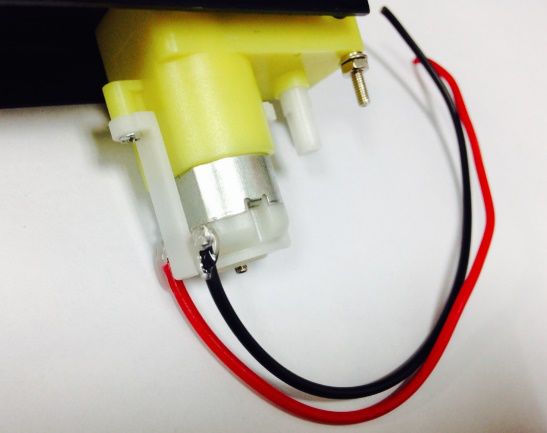
將黑色和紅色電線從零件袋中取出。將一根黑色和一根紅色電纜(長15厘米)連接到每個電動機(總共4臺電動機)。然后,使用剝線鉗剝去電線兩端的絕緣層(確保不要剝去太多–請參見下圖)。接下來,將電線焊接到固定在電機上的插針上。對所有四個電機重復焊接過程。
注意:焊接時,請注意紅色和黑色導線的正確位置。有關詳細信息,請查閱以下圖片。
步驟6:組裝說明-步驟3:組裝Romeo BLE控制器
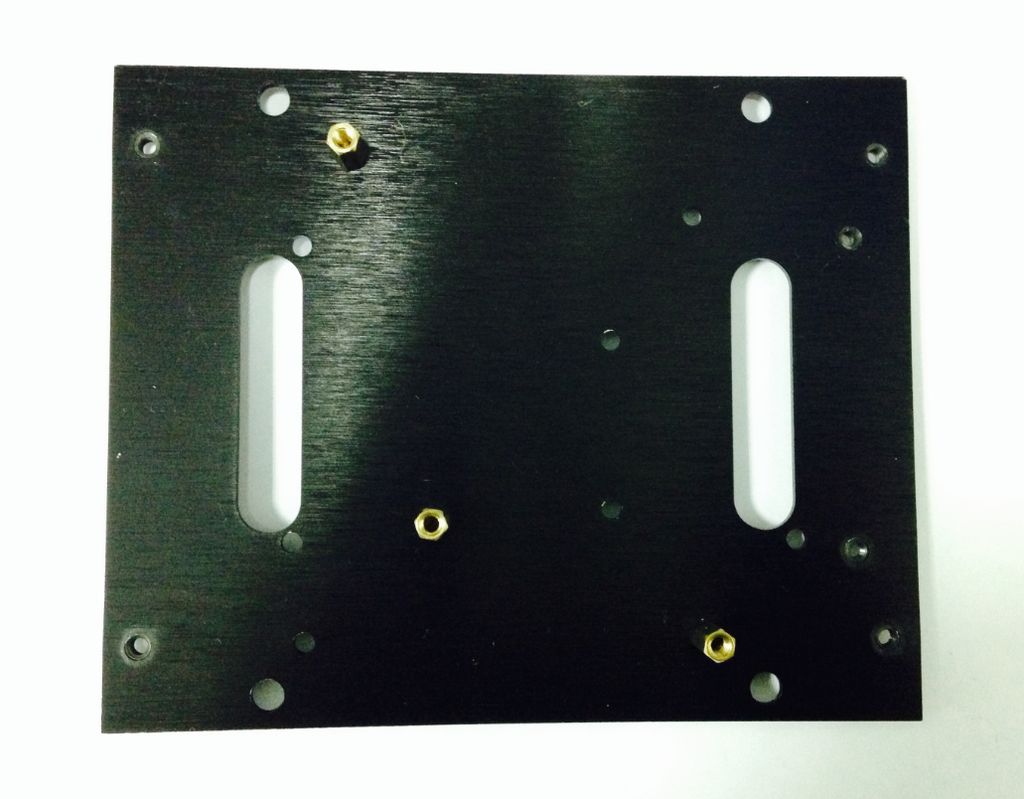
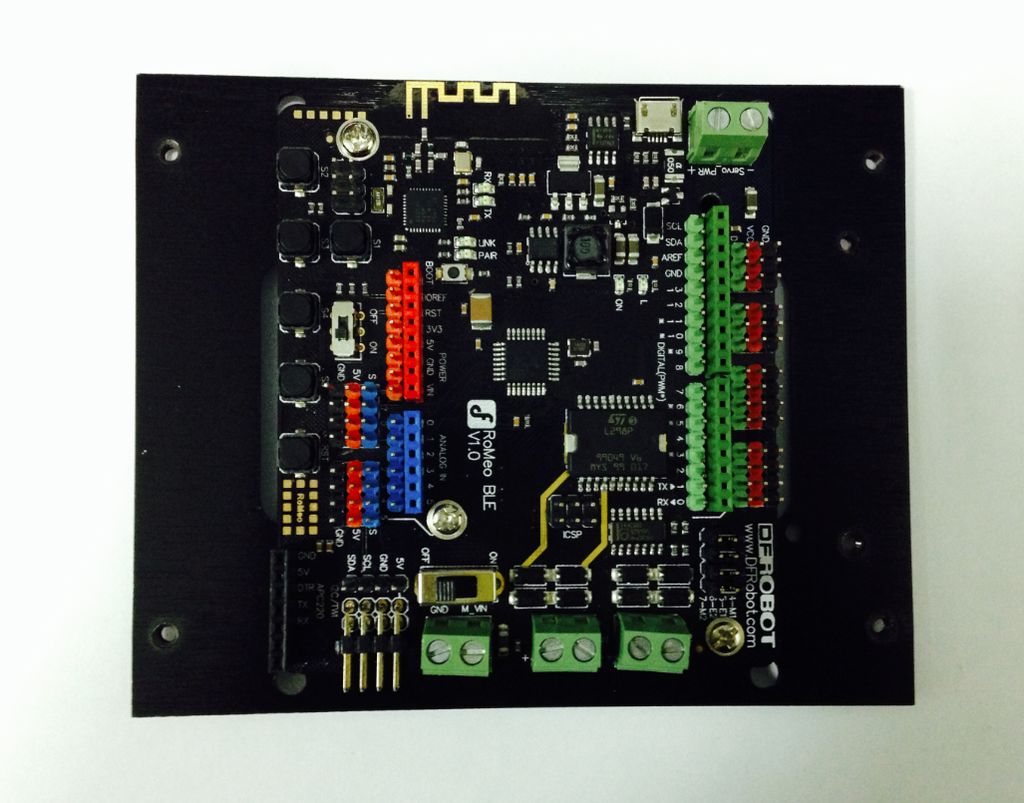
在零件袋中尋找三個銅支撐。那些1厘米長的支架用于固定Romeo控制器板。如下圖所示,控制器板上有三個孔。將三個銅支架放入孔中,然后用適當的螺釘將其固定到位。
步驟7:組裝說明-步驟4:組裝Romeo BLE控制器
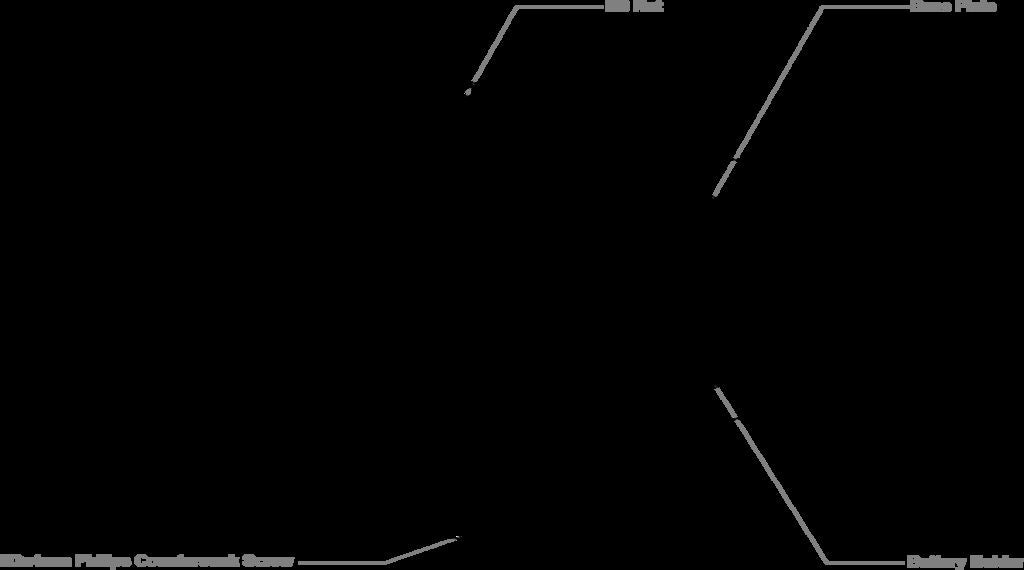
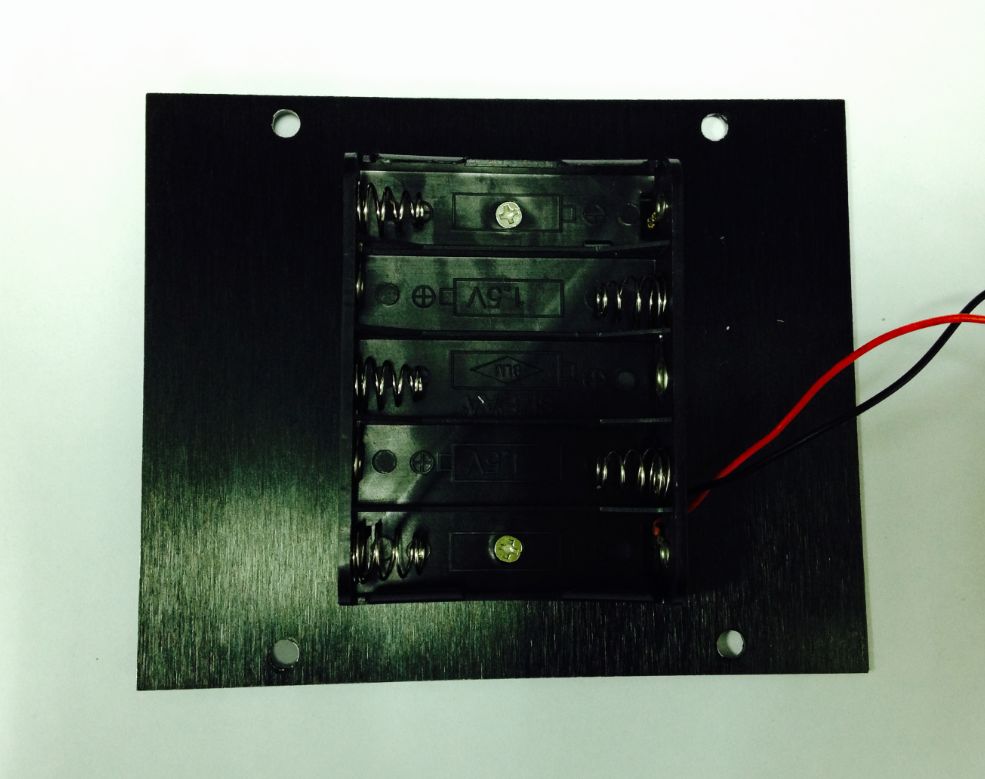
取出兩個沉頭螺釘(它們的頭是平的)。然后按照下圖所示的步驟將電池固定在汽車底座上。
步驟8:組裝說明-步驟5:制作電源開關
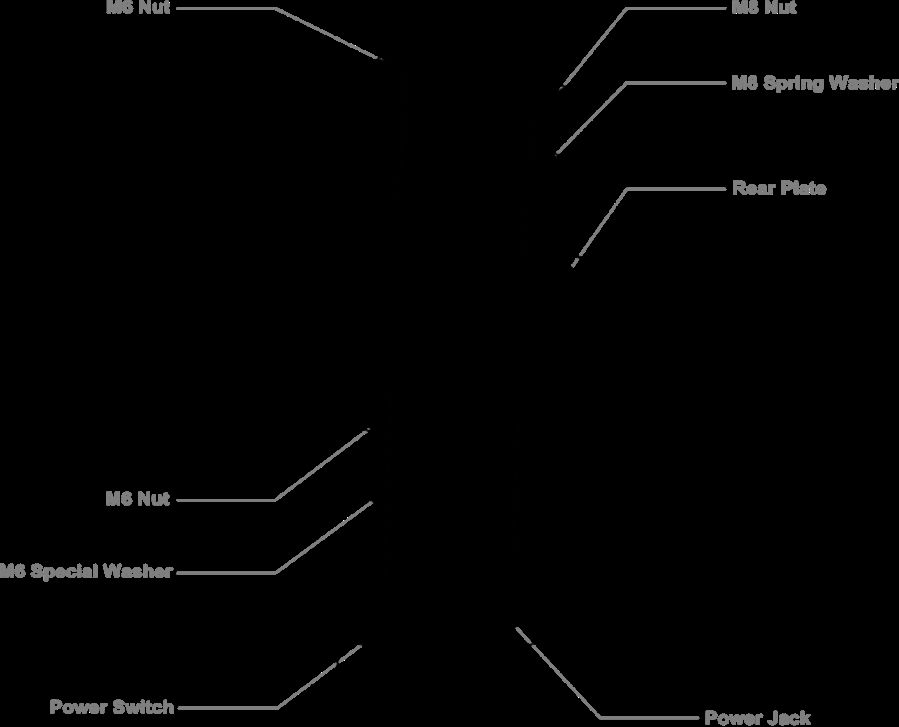

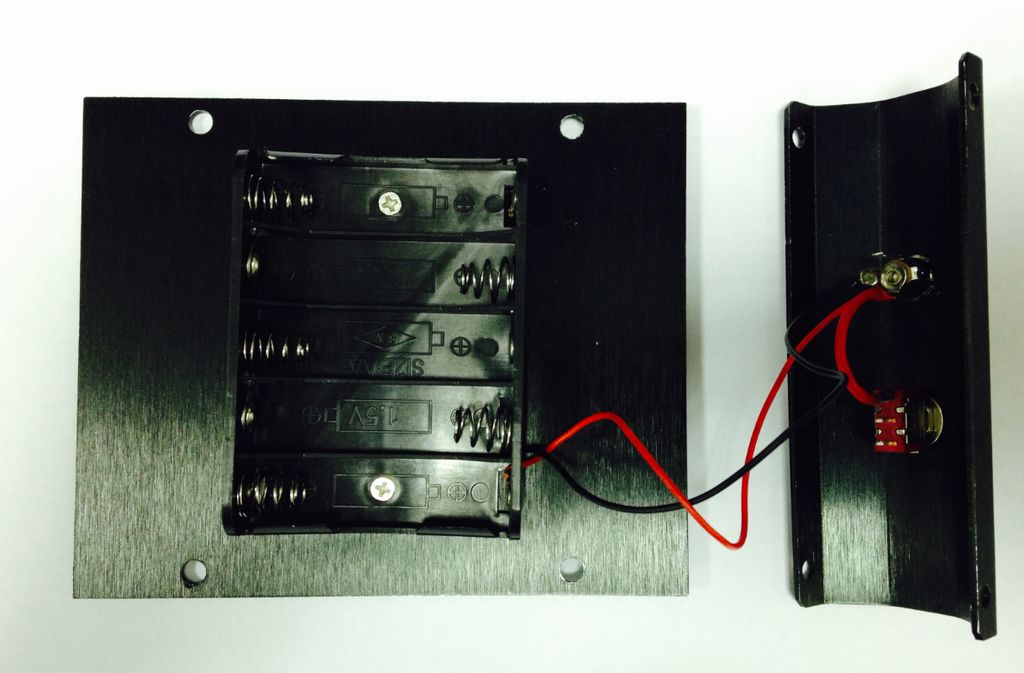
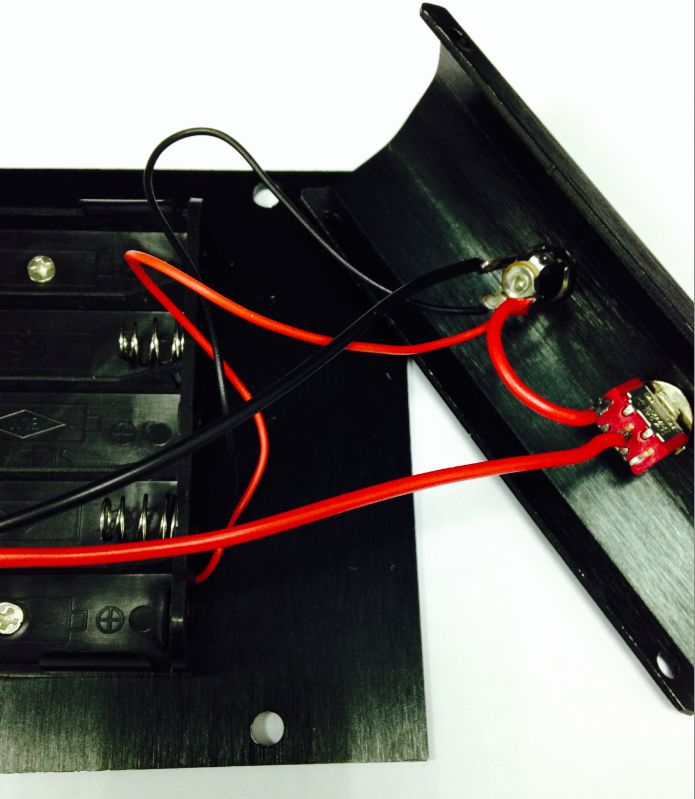
電池是機器人必不可少的命脈。為了控制電源使用,我們需要使用電源開關:不使用時,該開關會關閉電源,從而節省電和電池壽命。組裝和安裝電源開關之前,請參考下圖。
組裝開關時,請注意墊片和螺母的順序。
組裝開關后,我們要開始焊接其導線。取一些以前剩余的電線。剝去電纜兩端的電線,使電線的內部裸露(與之前的電機相同)。我們想將電線的裸露端焊接到開關的引腳上。焊接時,務必注意開關的插針位置。
讓我們逐步進行此操作。
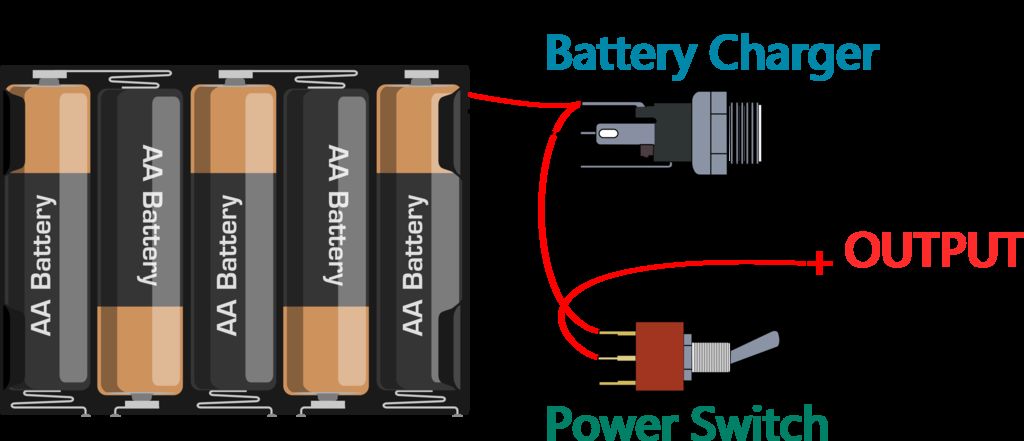
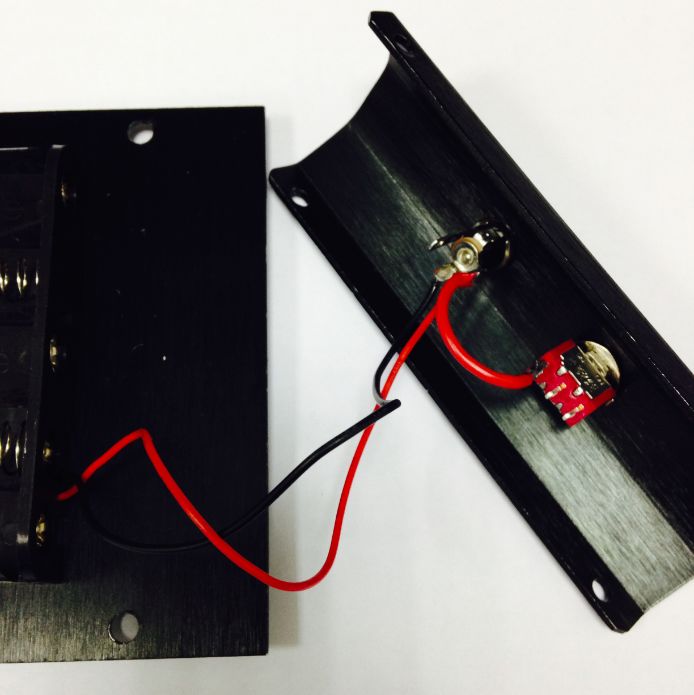
a)將開關連接到電池充電器。注意這兩個項目的確切位置。
b)如下圖所示,焊接連接交換機和電池充電器的紅色電纜。
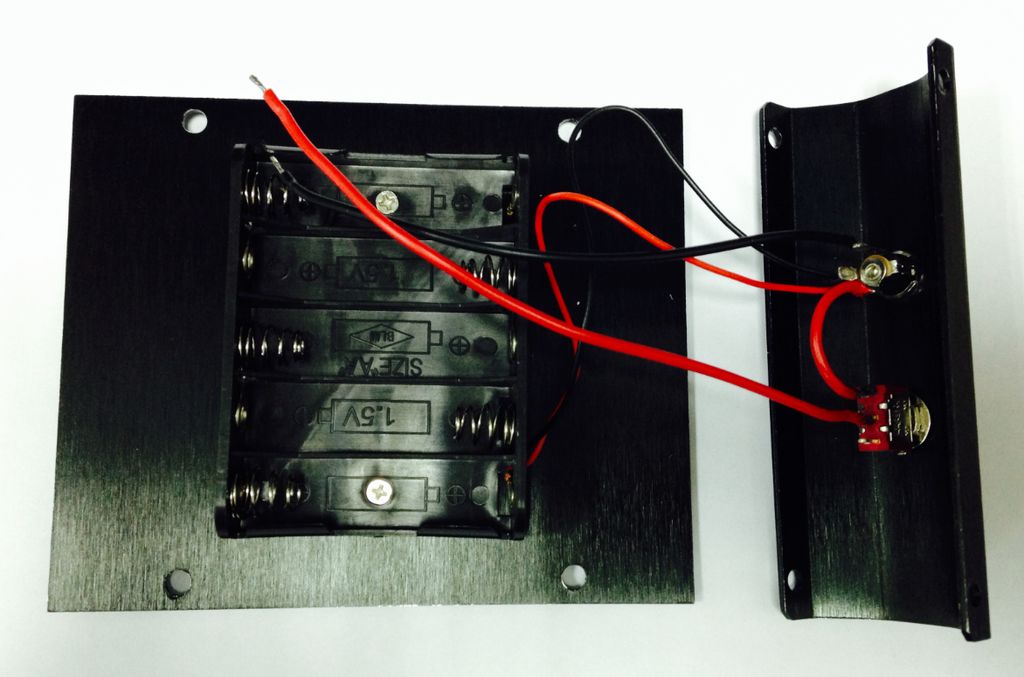
c)最后,取一根紅色電纜和一根黑色電纜。將一根電纜的一端連接到電池充電器的負極,另一根電纜的一端連接到電池充電器的正極。然后將兩條電纜的另一端連接到Romeo BLE控制器上。
觀看放大的圖片,可以更好地了解電線的連接方式。焊接后,請確保從頭到尾檢查電池和Romeo控制器之間的接線是否一致,并與上述圖片匹配。
步驟9:組裝說明-STEP6:制作電源開關
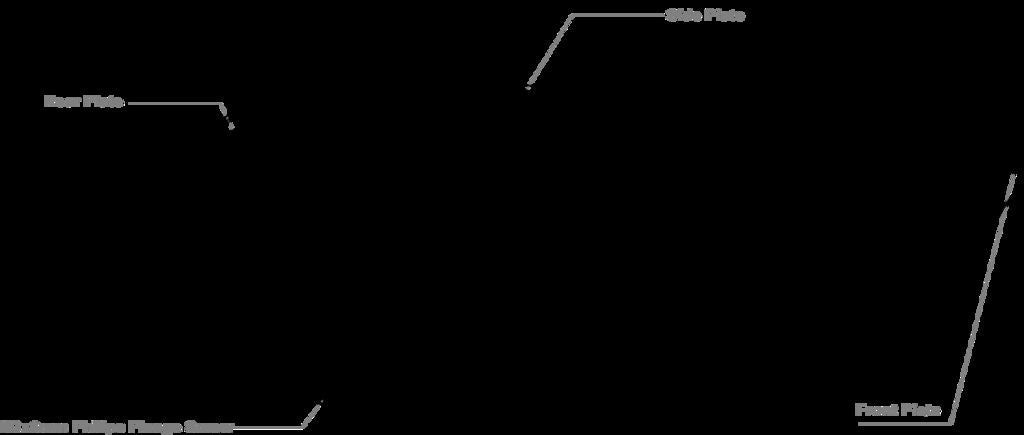
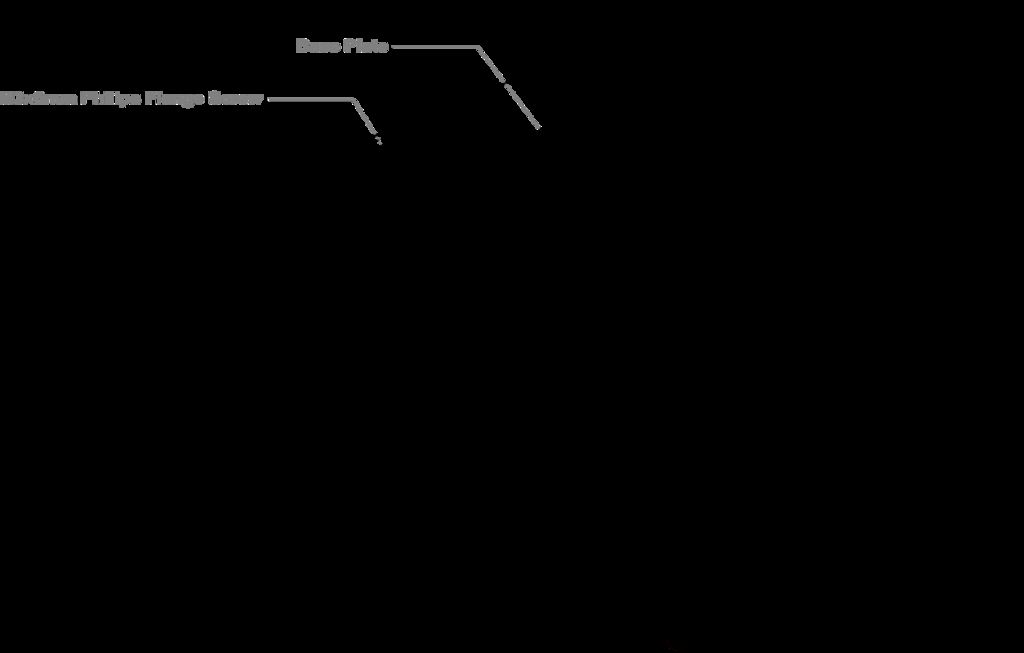
使用八個M3x6mm螺釘,將側板固定到前后保險杠板上,如圖所示注意:在此步驟中擰緊螺釘時,請確保首先不要完全擰緊螺釘-這樣,我們可以在以后的步驟中輕松卸下頂板,如果需要的話。進行調整。
然后,將底板重新安裝到汽車車身上。
**這是汽車底座組裝后的樣子-記住要安裝
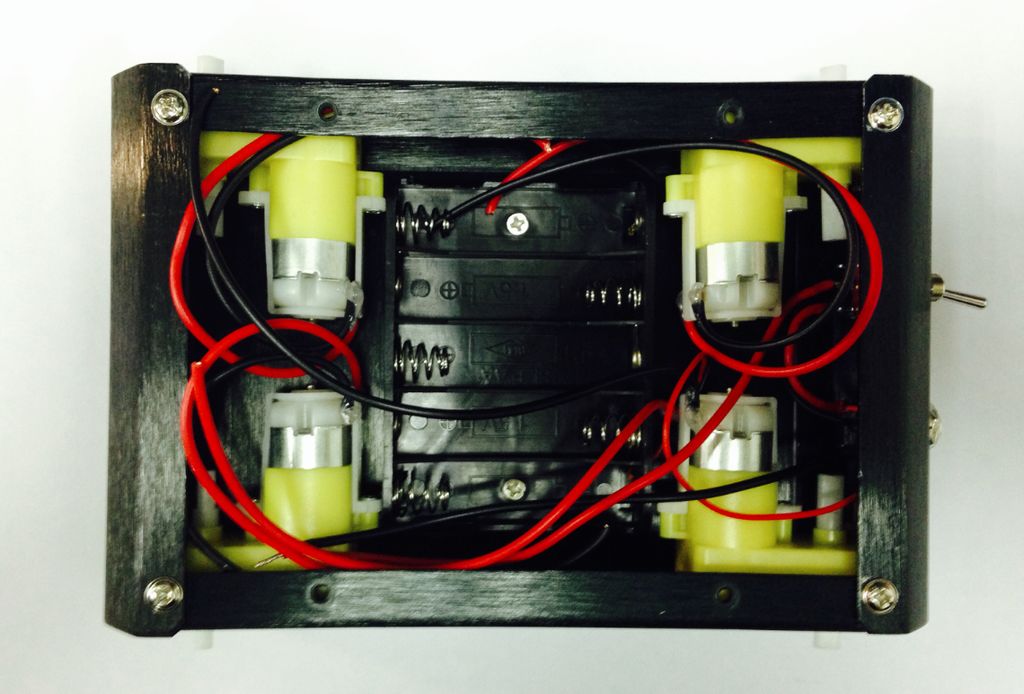
步驟10:組裝說明-STEP7:將電動機與微控制器板連接
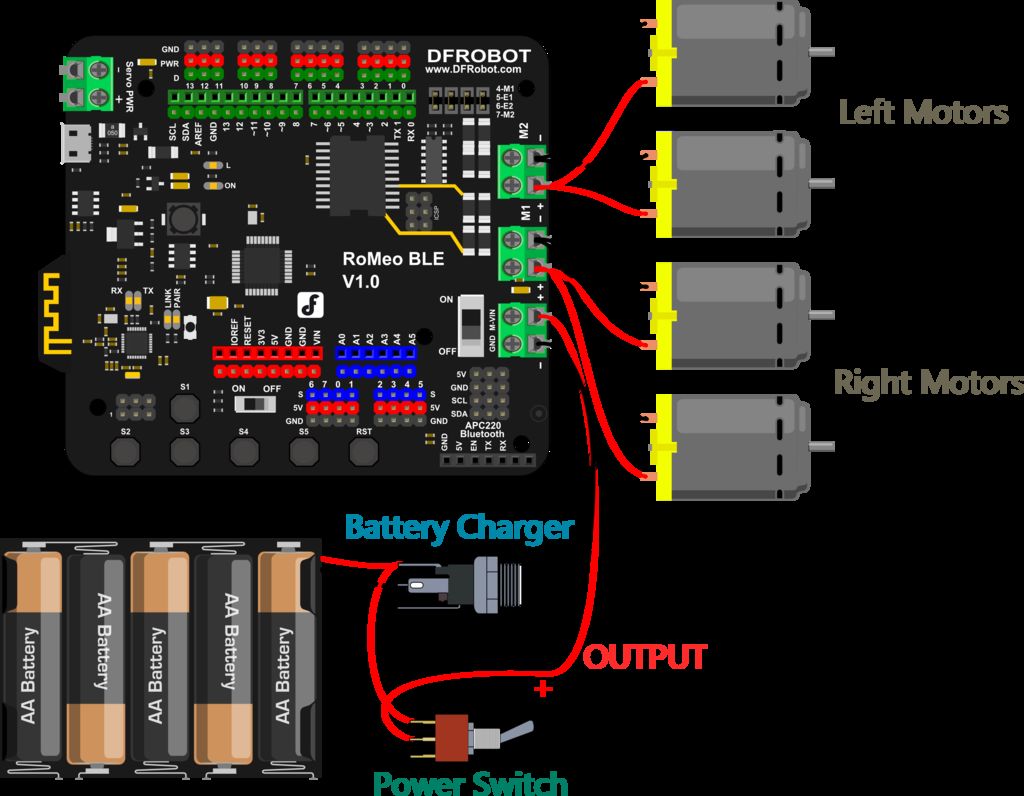
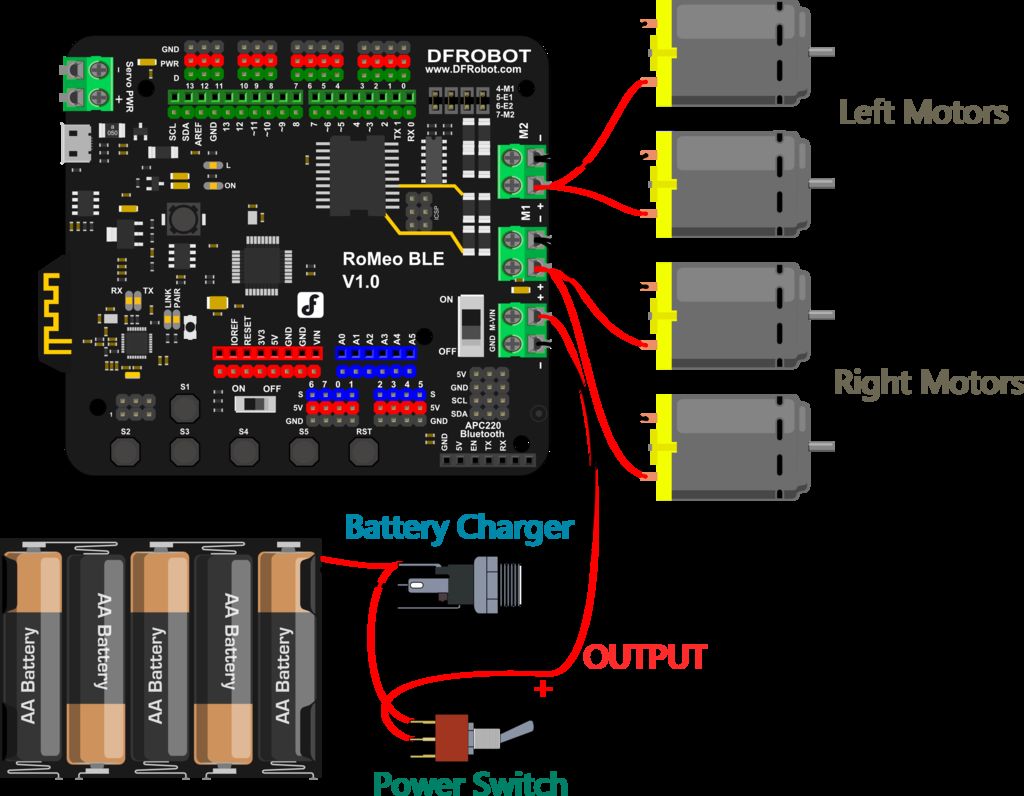
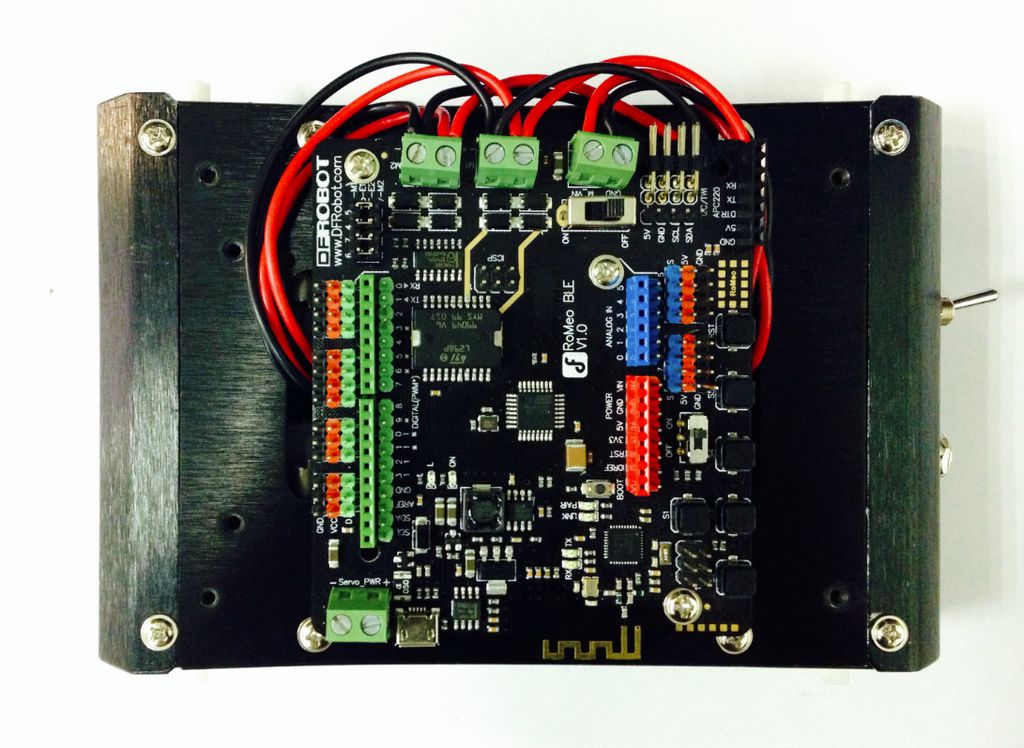
現在我們需要電動機用微控制器板。仔細遵循下圖:左馬達的紅線和黑線應焊接到M2中;正確的電動機的紅線和黑線應焊接到M1。請特別注意電池組:黑色電線應焊接到接線端口的GND上,而紅色電線應焊接在標有VND的電線端口中。用螺絲刀松開并擰緊電線端口-插入電線后,請確保將這些端口固定好。
注意:確保將來自一臺電動機(即左電動機)的電線焊接到其中馬達端口。 (即下圖的M2端口-請勿將一根電動機的導線焊接到兩個單獨的端口中。)
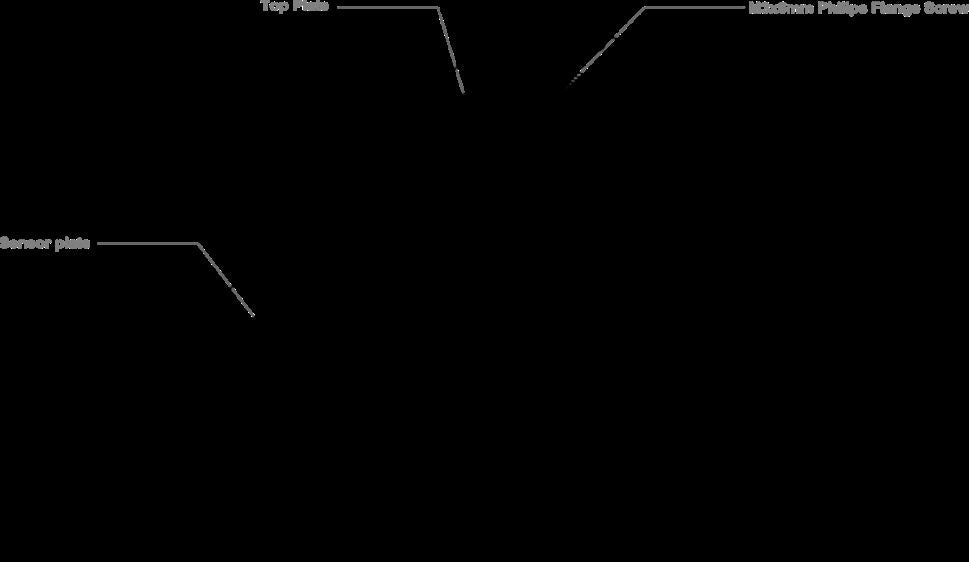
將電動機的導線焊接到微控制器板上之后,我們準備將頂板連接到汽車的底座。
在安裝頂板之前,您可以選擇安裝傳感器板(請參見下圖)-如果您尚不打算使用傳感器,則可以跳過此額外步驟。 p》
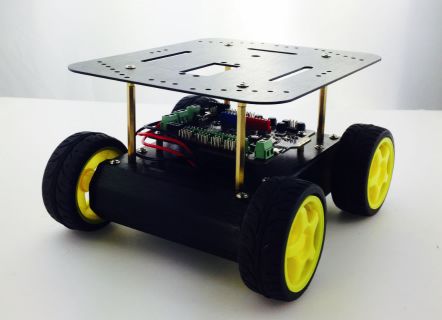
在安裝平臺的頂部之后,您的機器人平臺應類似于下圖。
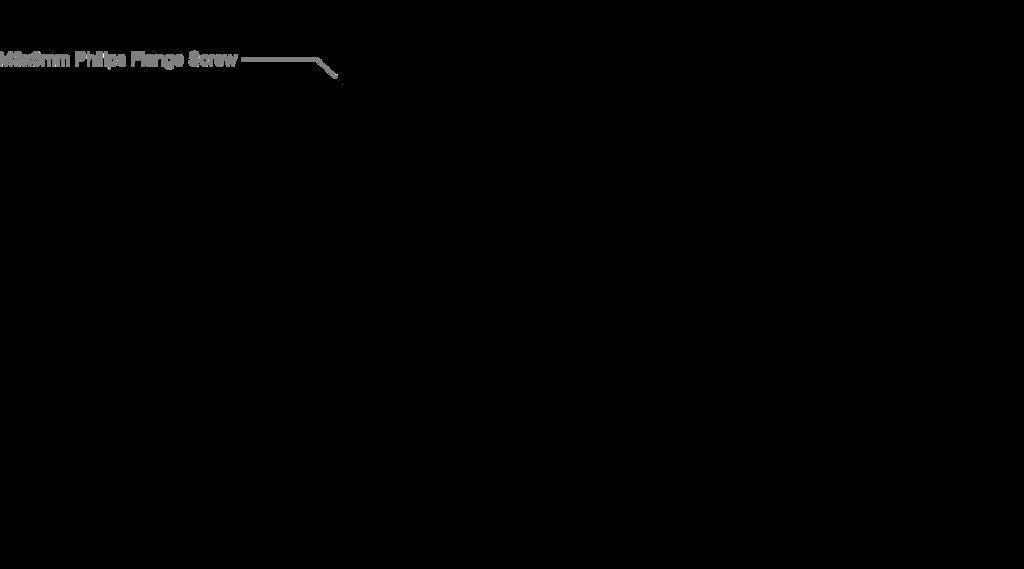
步驟11:組裝說明-STEP8:在您的機器人上附加一個水平儀
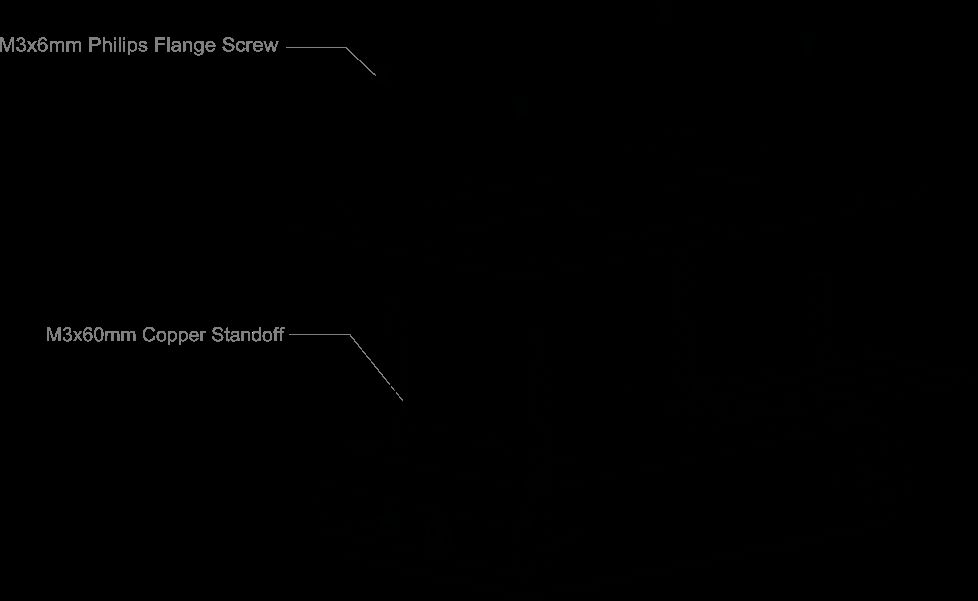
找到基座頂板上的四個孔。擰入四個M3x60mm銅支架,然后如下圖所示安裝附加的頂板-使用M3x6mm螺絲將該板固定到銅支架上。
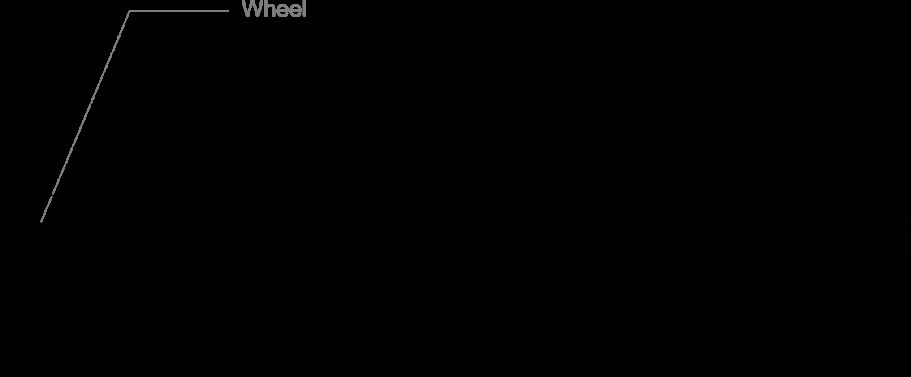
在機器人平臺上扔一些輪子,您將
第12步:編碼
組裝好之后,是時候將代碼上傳到微控制器并使Arduino機器人移動了。一旦組裝好,機器人便具有用于移動的所有組件。瀏覽名為“ MotorTest.ino”的Arduino文件的示例代碼。
示例代碼MotorTest:
#include
DFMobile Robot (4,5,7,6); // initiate the Motor pin
void setup () {
Robot.Direction (LOW,HIGH); // initiate the positive direction
}
void loop () {
Robot.Speed (255,255); //Forward
delay (1000);
Robot.Speed (-255,-255); //Back
delay (2000);
}
下載代碼,然后將其上傳到您的微控制器。電動機和車輪應迅速運轉。如果沒有,請檢查電池和電源開關是否正確安裝。電動機正常工作后,恭喜!您已經邁出了一大步-差不多要把橡膠放到路上了。
然后觀察您的機器人汽車,檢查它是否可以在1秒鐘內前進并在1秒鐘內后退。如果是這樣,祝您好運。您無需調整組件。對于那些需要對汽車底座或馬達進行一些調整的人,請找到以下有關機器人運動方式的信息。
檢查您的機器人平臺是否遵循上面顯示的代碼:它應該向前移動保持1秒鐘,然后反轉1秒鐘。如果是這種情況,只需瀏覽以下內容,然后就可以開始了!
但是,大多數人都需要調整他們的電動機。在此之前,我們先簡要回顧一下機器人的電機功能和代碼如何工作。
步驟13:如何使機器人前進?
為了理解這個問題,我們首先檢查一下機器人的向前運動。
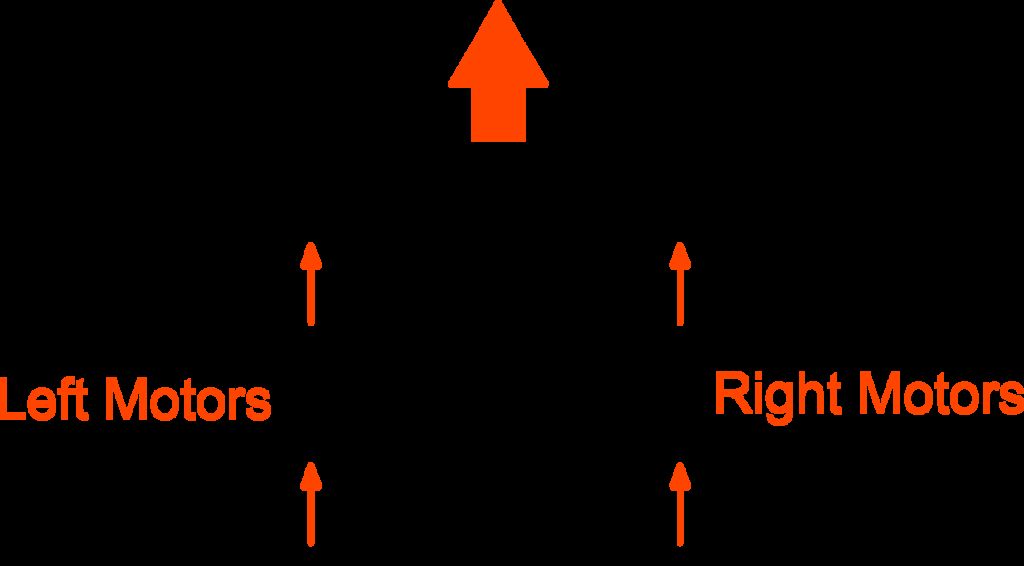
下圖說明了這種向前運動。
上方的紅色箭頭表示車輪的方向。如上圖所示,只有在左右車輪/電動機都向前行駛時,汽車才能向前行駛。如上所示,Arduino機器人僅在左右電機和車輪都向前移動時才向前移動。
代碼簡介
第一行代碼是:
#include//調用庫
我們無需對此行進行過多思考。我們要做的就是調用/使用Arduino基本框架之外的一組功能-DFMobile庫。有關Arduino庫的更多信息,請訪問Arduino網站。
下一行代碼是:
DFMobile Robot(4,5,7,6);//啟動電動機針腳
此功能來自DFMobile庫(也就是說,它不是通用的Arduino功能)。我們在這里使用它來初始化微控制器上的電機引腳(4、5、7、6)-如果沒有此功能,電機將無法啟動。
我們稍后還將使用此功能。
看看下面的功能:
DFMobile機器人(EnLeftPin,LeftSpeedPin,EnRightPin, RightSpeedPin);
此功能用于初始化四個電動機引腳(4、5、7、6),并分為四個單獨的參數:
EnLeftPin:控制電動機左方向的引腳
LeftSpeedPin:控制左馬達速度的引腳
EnRightPin:控制右馬達方向的引腳
RightSpeedPin:控制右馬達速度的引腳
請注意:不包含此功能,機器人的電動機將無法運行。另外,必須將此函數放置在Arduino草圖的void setup()字段中。
在測試機器人的向前運動之前,我們可能遇到了一個問題:汽車將開始漂移,更改方向,而不完全遵循我們給出的代碼。這是由于未正確地將電動機電線焊接到電池上。
不用擔心-我們可以通過代碼進行糾正。通過使用LOW/HIGH值,我們可以調整汽車轉彎的方向。
步驟14:如何調整機器人汽車的直線方向?
要調整電動機和車輪的方向,我們需要以下代碼行:
Robot.Direction(LOW,HIGH);
功能如下:
Robot.Direction(LeftDirection,RightDirection);
此功能用于使電動機向前移動。該函數分為兩個參數:LeftDirection和RightDirection,在Arduino代碼中以LOW或HIGH形式編寫。
之前,我們簡要介紹了如何使Arduino機器人向前移動。在這里,我們將使用“低/高”來糾正機器人的向后移動。例如,在示例代碼中,LeftDirection被設置為LOW。但是,機器人汽車的左輪可能會向后旋轉而不是向前旋轉。現在,您要做的就是將LeftDirection從LOW更改為HIGH。相同的方法適用于右輪。例如:在此示例代碼中,LeftDirection被配置為LOW。假設您的左輪沒有向前移動,而是向后移動。在這種情況下,請將LeftDirection的配置從LOW更改為HIGH。將其更改為“高”后,再次上傳代碼-您應注意,左輪現在向前移動而不是向后移動。如果此調整有效,請對RightDirection(從低到高,反之亦然)進行相同的操作。
成功調整Arduino機器人的方向后,就可以設置了!恭喜!您現在可以使用機器人的所有基本功能。不過,在結束之前,有必要簡要地討論一下Robot.Speed()函數。
對以下函數有所幫助:
Robot.Speed(LeftSpeed,RightSpeed) ;
此功能包含兩個元素(LeftSpeed和RightSpeed),用于設置電動機的速度。您可以輸入-255到255之間的數字。255是最大數字,負號表示方向。
此功能用于配置電動機的速度。該功能分為兩個參數:LeftSpeed和RightSpeed。這些參數以Arduino代碼編寫,取值范圍-255至255。255是前進速度最快的值;默認值為255。 -255是最快的速度(即反向)。
我們已經在代碼的void setup()部分中配置了機器人的速度。現在,我們可以使用speed()函數來控制汽車的速度,甚至向前/向后的方向。
看看是否可以理解以下兩行:Robot.Speed(255,255);機械手速度(-255,-255);
第一行顯示了汽車以全速前進-如果可以的話,以全速前進(船長,是的)。第二行顯示汽車以全速向后移動(倒車)。
從這個意義上說,speed()是必不可少的函數。接下來,我們將回顧最后一部分:機器人如何運動和旋轉的原理。
步驟15:機器人如何運動和旋轉
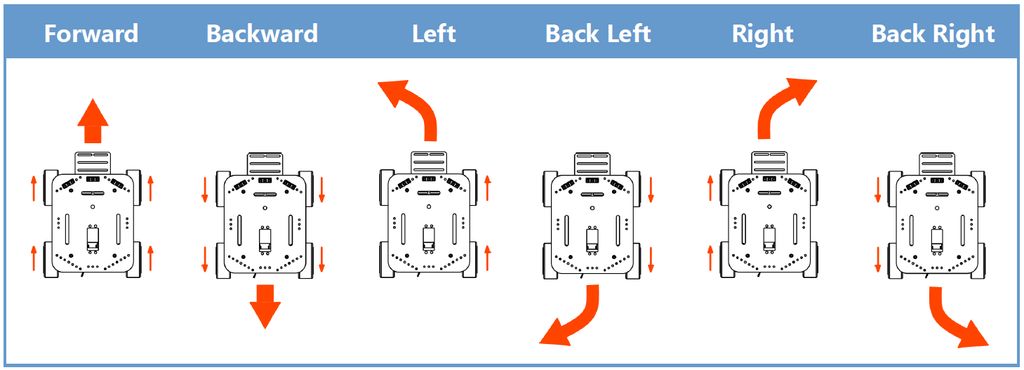
下圖顯示了機器人汽車的一些常規運動方式。例如,如果“左方向”的速度為零,那么如果您向右輪提供一些力向前移動,機器人將向左轉。
下圖顯示了Arduino的多種方式機器人可以移動和轉動。例如,如果左輪的速度設置為0,則將導致右輪向前移動-因此,Arduino機器人將向左旋轉。
要考慮的事情:我們怎么能
最后:如果需要,您可以運行更多代碼來測試和校準自己的機器人運動。打開“ MotorTest2.ino”文件。除了左右轉彎之外,此代碼還應幫助您更好地理解和評估前進和后退運動的能力。考慮到這一點,將那些輪胎放到道路(或地毯)上,讓我們撕裂吧!
恭喜,現在您已經建立了第一個機器人!它具有基本功能,可以向前,向后,左轉和右轉。
-
機器人
+關注
關注
211文章
28571瀏覽量
207736 -
Arduino
+關注
關注
188文章
6474瀏覽量
187444
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
開源項目!OpenCat—— 一個全能的平價四足機器人
【開源項目】你準備好DIY一款功能強大的機器人了嗎?
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
柔性機器人與剛性機器人區別與聯系






 工商網監
工商網監
評論