 如何將超聲波傳感器連接到Arduino Uno
如何將超聲波傳感器連接到Arduino Uno
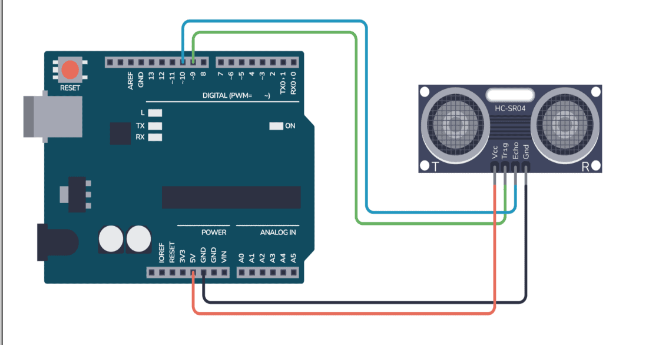
步驟1:硬件連接
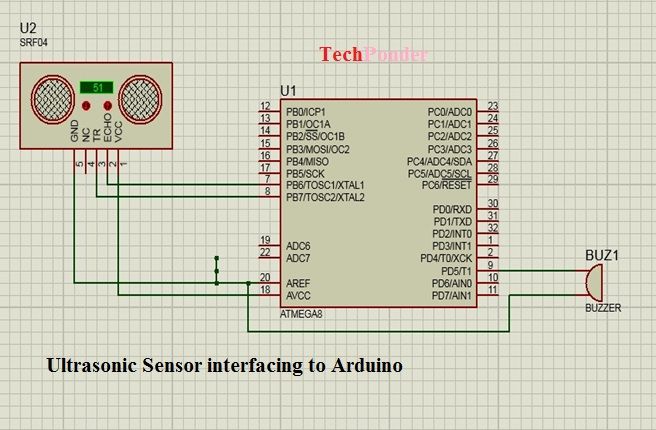
硬件連接:-
5v-》 Vcc
gnd-》 Gnd
第8針-》 Trig針
第7針-》回聲針
Arduino蜂鳴器
第9針-》 + ve針
Gnd-》 -ve針
步驟2:程序和結果
//超聲波傳感器與Arduino的接口。
int蜂鳴器= 9;
int triggerPin = 7;//觸發引腳7
int echoPin = 8;//回顯引腳8
void setup()
{
Serial.begin(9600);//我們將開始串行通信,因此我們可以在串行監視器Serial.println(“ Tech Ponder‘s UltraSonic Sensor Tutorial”)上看到距離。
pinMode(triggerPin,OUTPUT);//定義引腳
pinMode(echoPin,INPUT);
pinMode(蜂鳴器,輸出);
digitalWrite(蜂鳴器,LOW); }
void loop()
{int duration,distance;//添加持續時間和距離
digitalWrite(triggerPin,HIGH);//觸發波浪(例如使LED閃爍)
delay(10);
digitalWrite(triggerPin,LOW);
duration = pulseIn(echoPin,HIGH);//偵聽和等待波浪的特殊功能
distance =(duration/2)/29.1;//將數字轉換為cm(如果要英寸,則必須用合適的數字更改29.1
delay(1000);
Serial.print(distance);//打印數字
Serial.print(“ cm”);//和單位
Serial.println(“”);//僅打印到新行
if(距離《35)
{
digitalWrite(buzzer,HIGH);
Serial.println(“ Buzzer On”);
}
digitalWrite(buzzer,LOW);
}
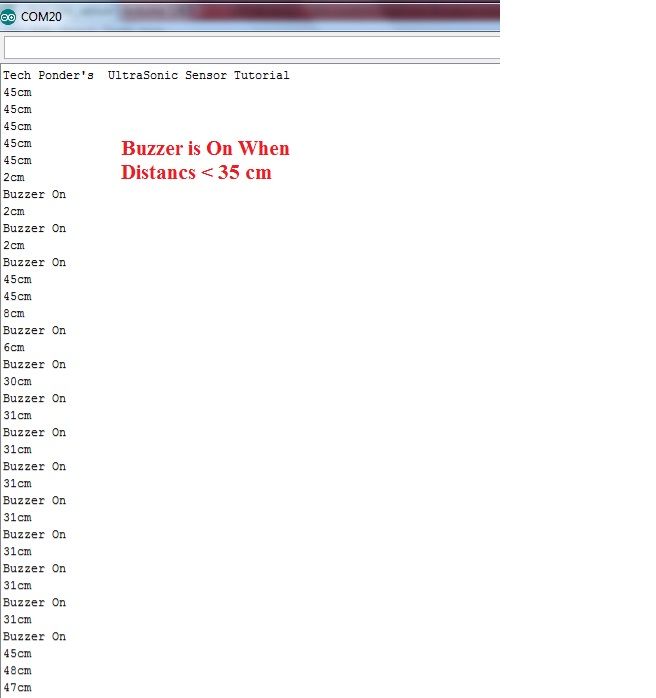
結果顯示在串行監視器上。
Arduino每隔一秒鐘就使用超聲波傳感器計算距離。當距離小于35厘米時,arduino會檢測到閾值并且蜂鳴器打開,可用作障礙物檢測器。當障礙物靠近距離小于35厘米時,它將發出警報。用戶。
-
超聲波傳感器
+關注
關注
18文章
586瀏覽量
35985 -
Arduino
+關注
關注
188文章
6477瀏覽量
187666
發布評論請先 登錄
相關推薦
超聲波傳感器的種類原理與設計應用的注意要點
倍加福發布USi-industry超聲波傳感器系統
超聲波傳感器是模擬還是數字
超聲波傳感器輸出的是什么信號
超聲波傳感器的工作原理解析
在全志H616核桃派開發板上實現超聲波傳感器測距
超聲波探頭連接到示波器出現了這個?
超聲波連接示波器問題
超聲波傳感器的工作原理 超聲波傳感器的聲波頻率是多少
超聲波傳感器的工作模式有哪些
如何將HC-SR04連接到Arduino并編寫一個簡單的程序來測量距離





 工商網監
工商網監
評論