 兩足機器人DIY圖解
兩足機器人DIY圖解
步驟1:組裝Servo
第一步是購買一些伺服電機和一個伺服支架套件。我從Hobbyking那里獲得了舵機,而支架套件則來自ebay。
需要12個Servos。我使用了Hextronik HX5010標準伺服器。
第2步:構建一條或兩條腿
接下來按照您想要的方式構建機器人搭配套件中的不同零件。我用兩條腿建造了機器人。每條腿有6個伺服電機。找到合適的機器人布局可能需要反復試驗。確保每個腿都有所需的運動范圍。
步驟3:清理接線
捆扎在一起,并將導線布線到頂部,在該處我們將連接控制板。使用的控制板是智能伺服控制器。確保電線有足夠的松弛度,以使伺服電機自由移動。
步驟4:連接!
連接伺服器到達輸出通道,無線電接收器到達輸入通道。記下哪個伺服器連接到哪個通道。設置控制板時,這將使您的生活變得更輕松。
所使用的無線電接收機是6通道HK-T6A V2。對于此機器人,我僅使用通道1-5
第5步:IO配置
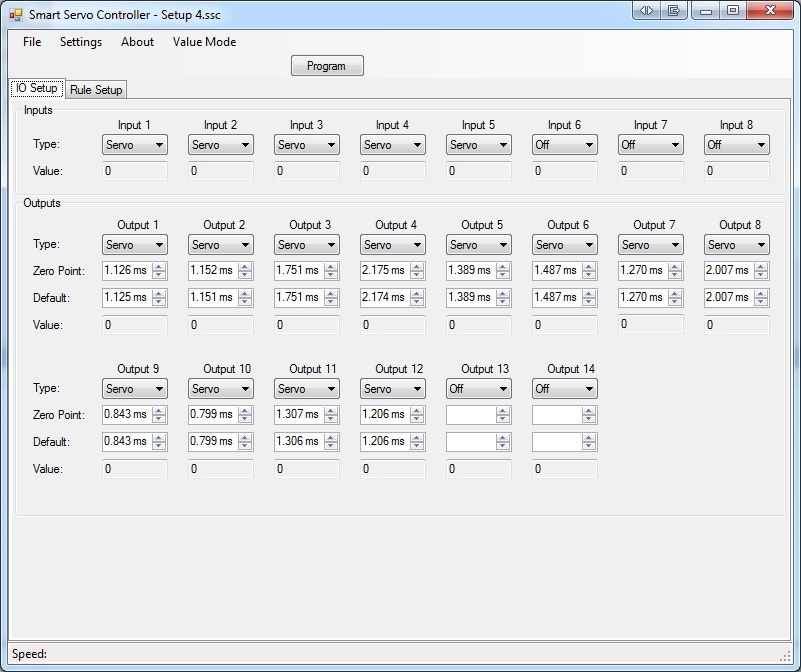
下一步,我們需要設置具有正確輸入和輸出通道的軟件。輸入類型為Servo,因為我們使用的是RC接收器。輸出通道也是Servo類型。
使用“值選擇器”設置默認的伺服位置。調整每個伺服器的位置,使機器人處于中立的姿勢。
步驟6:值選擇器

要使用“值選擇器”,請按住CTRL鍵并單擊一個數值框。如果單擊輸出通道,則滑塊將變為活動狀態。當您上下滑動滑塊時,伺服將移動到該位置。
如果您單擊的框是其中一個輸入,則需要移動實際的輸入設備。對于操縱桿,意味著推動操縱桿。這樣做時,值將在屏幕上更改。
選擇完值后,按ESC鍵保存該值。
步驟7:創建規則
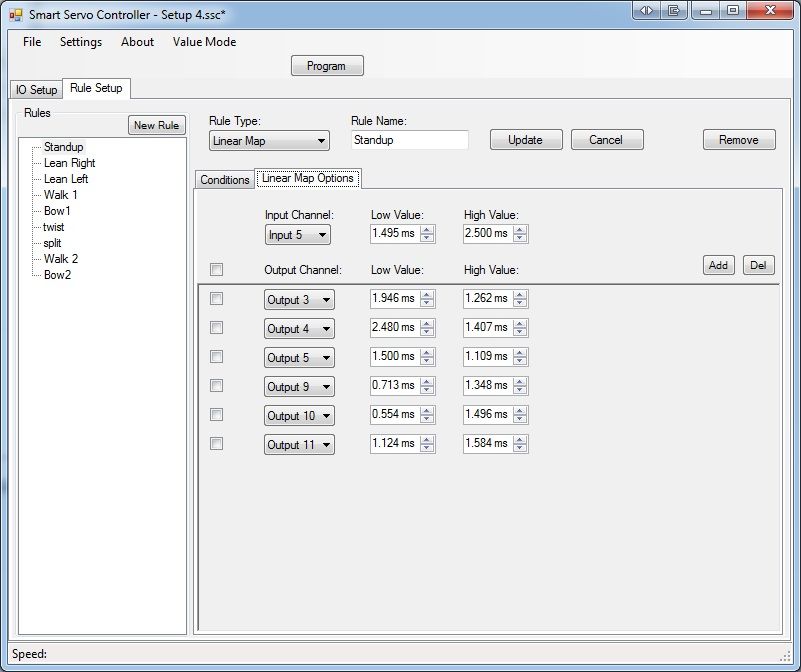
接下來,我們創建一系列規則,將輸入通道映射到我們希望機器人行走的不同功能。我創建了9條規則,如下所示。 “站立”規則使機器人從蹲伏位置轉到站立位置。為此,可以通過以下方法創建線性映射規則:
選擇輸入通道。使用值選擇器并將操縱桿軸移動到想要的坐姿位置,將輸入通道設置為較低的值。 。
移動實際的操縱桿,該值將顯示在屏幕上。
使用值選擇器將輸入通道的高值設置為機器人希望操縱桿軸所在的位置
為腿中的每個伺服器設置較低的值以使機器人蹲下。
為腿中的每個伺服器設置較高的值以使機器人站立。/li》
現在,當您將操縱桿軸從下蹲位置調整到站立位置時,舵機將適當移動。
步驟8:重復
針對您要執行的每組運動,對無線電控制器上的每個軸重復上一步。您可以同時運行多個規則,并且輸出將添加到一起。
該視頻提供了如何將輸入映射到兩個輸出通道的示例。
第9步:玩得開心
完成后,請按程序按鈕。現在該玩游戲了,看看如何使機器人行走!
-
機器人
+關注
關注
211文章
28630瀏覽量
207963
發布評論請先 登錄
相關推薦
人形機器人“造車”,車企扎堆布局!

四足機器人的結構、控制及運動控制

四足巡檢機器人特點和作用是什么

廣汽輪足人形機器人,保安外賣家教樣樣來
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】+兩本互為支持的書
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
開源項目!OpenCat—— 一個全能的平價四足機器人
【開源項目】你準備好DIY一款功能強大的機器人了嗎?
【CW32開發】初探四足機器人

在NVIDIA Isaac Lab中訓練四足機器人運動






 工商網監
工商網監
評論