 思嵐移動底盤助力服務機器人產業規模化發展
思嵐移動底盤助力服務機器人產業規模化發展
機器人底盤是機器人智能移動的基礎,它能幫助機器人實現自主定位、導航、避障等多種功能。隨著進入企業的不斷增加,不少業內人士對機器人底盤發展前景表示看好,一方面企業增多所帶來的競爭,有助于行業技術的不斷進步,另一方面,由于定位導航技術在實現上具有很高的門檻,基于機器人底盤直接進行上層開發的機器人企業越來越多,這不僅降低了其他企業進入服務機器人行業的門檻,同時也能在功能、成本等方面做出突破,為服務機器人的規模化發展鋪平道路。
機器人底盤主要由激光雷達、深度攝像頭、超聲波及防跌落傳感器等核心硬件組成。作為機器人的“雙腳”,機器人底盤賦予了機器人可靠、易用的定位導航系統,是實現機器人自主移動、避障等多種功能的重要核心部件。
根據機器人底盤結構的不同,機器人底盤主要可分為履帶式及輪式機器人底盤兩種。用在特種機器人身上一般采用履帶式結構,其能夠應用于各類復雜地面運動,例如在沙地、泥地等場景中,但速度相對較低,且運動噪聲較大。而應用于室內外,行駛在良好路面上的移動機器人常采用輪式機器人底盤結構,相對而言,輪式機器人底盤平穩性更好,運動速度更快,且運動噪音更低。另外,擁有良好綜合性能的輪式機器人底盤結構更為簡單、便于裝拆和維護,對于立足于產品設計的通用底盤也更為合適。
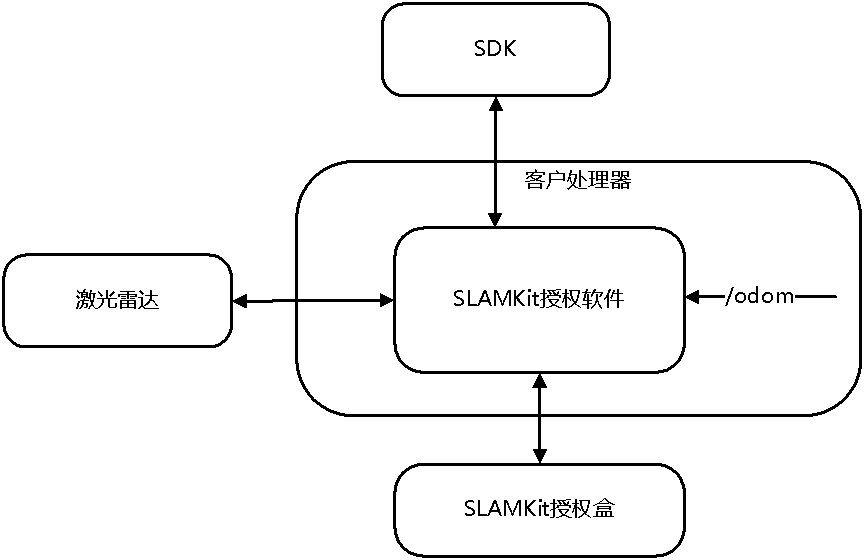
目前,國內涉足輪式機器人底盤的企業不在少數,其中不乏專門做機器人底盤銷售的企業,但能成熟應用于商業中的底盤并不多,思嵐科技就是為數不多的一家,成立于2013年的思嵐科技,一直致力于幫助機器人實現智能行走,不僅推出了低成本激光雷達,打破我國長期被國外壟斷的現象,同時,還推出了模塊化自主定位導航系統SLAMWARE,內含SLAM定位導航算法,僅為硬幣大小,基于激光雷達可提供實時定位建圖及自主導航功能。另外,為滿足更多應用需求,幫助企業快速解決機器人智能行走問題,還推出了可擴展的通用型機器人開發平臺ZEUS&Apollo。
機器人底盤屬于高端制造行業,研發周期長、試錯成本高是行業最大的痛點,若沒有固定的資金供應鏈以及技術積累,將難以實現盈利增收。而對于初創企業來說,還未看到產品流程市場就需要投入大量研發時間、材料成本等費用,資金回流將會是最大的難題,因此,在已有的機器人底盤上實現自定義開發上層應用無疑是最好的選擇,作為國內最早將機器人底盤推向市場的企業之一,加上其在機器人定位導航技術上的領先優勢,思嵐科技機器人底盤在眾多品牌中脫穎而出,內置思嵐科技自主研發的高性能定位導航系統SLAMWARE,可根據實際需要搭載不同的應用,無需外部環境調整及人為編程設置,廣泛適用于商場、餐廳、銀行、醫院、園區、展會等各類服務場景中。并能實現自主定位建圖與導航、虛擬墻和虛擬軌道、自主返回充電、自主上下電梯等多種功能。
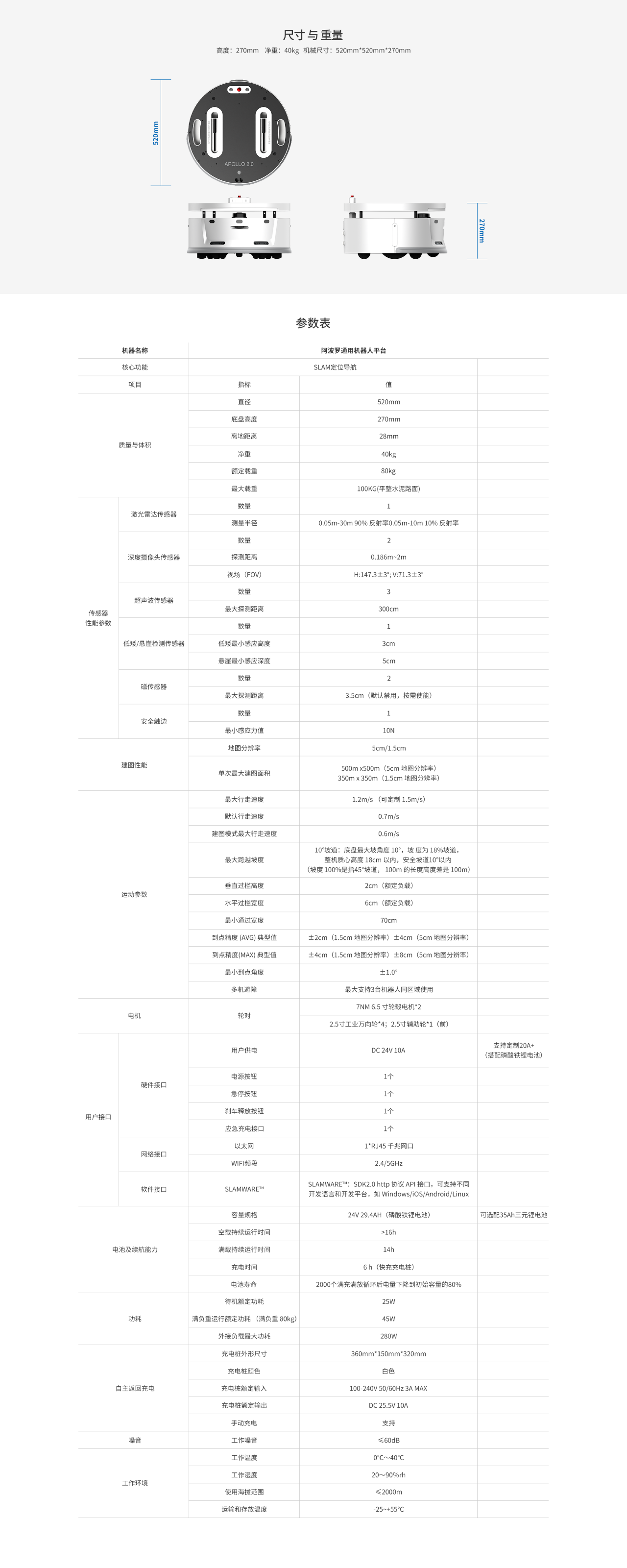
以思嵐科技的中小型機器人底盤Apollo來說,擁有激光SLAM技術的Apollo可在未知場景中做到實時定位并完成高精度地圖的繪制,采用SharpEdgeTM精細化地圖構建技術,能構建出高精度、厘米級別地圖,具有超高分辨率,且不存在累加誤差。同時,構建的地圖可直接使用,無需二次優化修飾,直接滿足使用預期。即時在復雜多變的場景下行走,Apollo也能做到動態識別環境中的人或其他障礙物,靈活規避障礙物。
另外,思嵐科技Apollo還利用了多傳感器融合技術,配備了超聲波、防跌落、深度攝像頭等多種傳感器,激光雷達傳感器可時刻掃描周圍環境,提供地圖數據,構建高精度地圖,并基于該地圖數據實現自主路徑規劃及導航功能;遇到玻璃、鏡面等高透材質障礙物時,超聲波傳感器能讓Apollo做到及時識別、避讓;深度攝像頭傳感器則可偵測到位于雷達掃描平面上方的障礙物,并及時發送信號進行規避;而防跌落傳感器可幫助Apollo機器人移動底盤全方位偵察周圍的工作環境,判斷工作區域是否存在邊界、臺階、坡度等情況,從而發送信號請求機器人移動底盤改變前進方便,避免跌落。
除了上述功能,Apollo還可進行虛擬墻&虛擬軌道設置,基于純軟件方式進行操作,無需額外輔助鋪設,即可對Apollo進行活動范圍及行走路線設置。同時支持自主返回充電、云端遠程管理及提供外擴硬件支持等。不僅如此,Apollo擴展接口還集成了網口,供電接口和各種控制接口以便用戶快速進行開發擴展。可通過有線網絡或WIFI與外部通信,其本身自帶的電池可以為自身與外接的擴展模塊供電,用戶可以通過各種控制接口對整個Apollo及其上層擴展模塊進行控制。
如今,基于Apollo機器人底盤的服務機器人已廣泛應用于商場、餐廳、超市、機場等各類服務場合,依靠思嵐科技自主研發的高性能定位導航系統,服務機器人可在更多更大且人群復雜的場景中穿梭自如。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
思嵐科技榮獲雙年度移動機器人優質供應鏈獎
觸覺傳感器的發展,對機器人產業有什么影響?
2026年:人形機器人產業規模預計超200億元大關
科沃斯助力吳中區機器人+人工智能產業發展
思嵐科技SLAMKit定位與建圖解決方案介紹
思嵐科技全場景機器人底盤Apollo2.0的特性
思嵐科技推出新一代圓形通用機器人底盤Apollo2.0
Al大模型機器人
鐳拓汽車底盤機器人激光焊接機快速、精準、穩定
江智機器人公司誠邀資源合作商共贏推進--- 康養機器人產業市場化發展

TE無線連接,助力下一代服務機器人!
富唯智能機器人控制系統:實現規模化柔性生產的智能引擎






 工商網監
工商網監
評論